You might also like
- Temas 1.6 y 1.7Document4 pagesTemas 1.6 y 1.7FerniHelseyKeyesNo ratings yet
- Ejercicios MTBF MTTRDocument8 pagesEjercicios MTBF MTTRybrahimj100% (1)
- Programación Anual de Educación FísicaDocument12 pagesProgramación Anual de Educación FísicaJUANCA_ALIAGA75% (4)
- Solucionariosantillana4°2015 2016Document128 pagesSolucionariosantillana4°2015 2016Agustin Padilla Davalos81% (21)
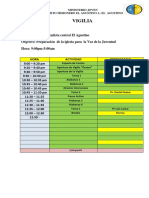
- Programa de VigiliaDocument2 pagesPrograma de Vigiliaalain villavicencio100% (1)
- Mate 3Document2 pagesMate 3alain villavicencioNo ratings yet
- Especialidad de Electricidad Torno ElectronicaDocument21 pagesEspecialidad de Electricidad Torno Electronicaalain villavicencioNo ratings yet
- Simulación en ProteusDocument5 pagesSimulación en Proteusalain villavicencio100% (1)
- Aplicaciones Del Efecto VenturiDocument3 pagesAplicaciones Del Efecto Venturialain villavicencioNo ratings yet
- Ejercicios de Algoritmos Tercera ParteDocument2 pagesEjercicios de Algoritmos Tercera Partealain villavicencioNo ratings yet
- Control de Un Robot Autónomo Tipo Péndulo InvertidoDocument11 pagesControl de Un Robot Autónomo Tipo Péndulo Invertidoalain villavicencioNo ratings yet
- Ejercicios de Algoritmos Tercera ParteDocument2 pagesEjercicios de Algoritmos Tercera Partealain villavicencioNo ratings yet
- Tecnología de Materiales Ferrosos y No FerrososDocument5 pagesTecnología de Materiales Ferrosos y No Ferrososalain villavicencioNo ratings yet
- Lista de ExigenciasDocument2 pagesLista de Exigenciasalain villavicencioNo ratings yet
- Convertidor Reductor de VDC VDC Con SCR Y Control PWMDocument5 pagesConvertidor Reductor de VDC VDC Con SCR Y Control PWMalain villavicencioNo ratings yet
- Preguntas de Análisis Sobre CLAEDocument7 pagesPreguntas de Análisis Sobre CLAEAlain VillavicencioNo ratings yet
- TiristoresDocument4 pagesTiristoresmarlonNo ratings yet
- San RoqueDocument13 pagesSan RoqueJMilton AlejandriaNo ratings yet
- La Información Como Un Recurso de Las OrganizacionesDocument1 pageLa Información Como Un Recurso de Las OrganizacionesYherzon Brayan Bellido HuarancaNo ratings yet
- Ensayo Capítulo - El Cerebro - Aslhy BracamonteDocument3 pagesEnsayo Capítulo - El Cerebro - Aslhy BracamonteaslhymbhNo ratings yet
- Nathan - Unified - En.es (1) ESPAÑOLDocument15 pagesNathan - Unified - En.es (1) ESPAÑOLMonica Michelle Barrios Cruz100% (1)
- Método Del LumenDocument12 pagesMétodo Del Lumenarquitectura1cervNo ratings yet
- TRABAJO DE CIVIL - Luis NarvaezDocument12 pagesTRABAJO DE CIVIL - Luis NarvaezJunior OchoaNo ratings yet
- Mapa Conceptual DerivaciónDocument4 pagesMapa Conceptual DerivaciónDavid ArevaloNo ratings yet
- Gestion Visual Look AheadDocument5 pagesGestion Visual Look AheadCristian Manuel Rios Berrocal100% (1)
- Guia Relaciones ClasesDocument26 pagesGuia Relaciones ClasesFany Jackeline Mayta AlvaNo ratings yet
- Sistema RespiratorioDocument10 pagesSistema Respiratoriofabian suarezNo ratings yet
- Herlom Internacional SA de CVDocument50 pagesHerlom Internacional SA de CVACERO ATDNo ratings yet
- Albert Bandura y Su Teoría de Aprendizaje SocialDocument10 pagesAlbert Bandura y Su Teoría de Aprendizaje SocialFelix Alva CruzNo ratings yet
- Facultad de Ciencias Economicas y AdminiDocument95 pagesFacultad de Ciencias Economicas y AdminiEduardo Javier Ignacio LeónNo ratings yet
- Hanseniaspora Vineae Caracterizacion y Su Uso en La VinificacionDocument51 pagesHanseniaspora Vineae Caracterizacion y Su Uso en La VinificaciondanaNo ratings yet
- La Reseña CríticaDocument9 pagesLa Reseña CríticaMirka C. BauerNo ratings yet
- Problema de TransporteDocument11 pagesProblema de TransporteGabriel FloresNo ratings yet
- Triptico VolcanDocument2 pagesTriptico VolcanJESSICAC100% (1)
- Ejercicios Conversion de Unidades - 2016 B - FÍSICA 1 A PDFDocument2 pagesEjercicios Conversion de Unidades - 2016 B - FÍSICA 1 A PDFJhon Rody Montenegro BorborNo ratings yet
- Quiz 2 - Semana 7 - Ra - Primer Bloque-Simulacion Gerencial - (Grupo b06)Document17 pagesQuiz 2 - Semana 7 - Ra - Primer Bloque-Simulacion Gerencial - (Grupo b06)Angel MurciaNo ratings yet
- 2 Weiss - Reflexiones de Un Pedagogo Hermeneuta en La Construcción Del Objeto de Estudio PDFDocument16 pages2 Weiss - Reflexiones de Un Pedagogo Hermeneuta en La Construcción Del Objeto de Estudio PDFliberdaesNo ratings yet
- 1 Semana GeografiaDocument16 pages1 Semana GeografiaAmigo En CuscoNo ratings yet
- Como Leer Inglés Técnico y Científico EntendiéndoloDocument6 pagesComo Leer Inglés Técnico y Científico EntendiéndoloMaria MayorgaNo ratings yet
- Boletín1 WebDocument9 pagesBoletín1 Webcubiaselias7497No ratings yet
- Ficha Del Plan de Acción PA 1 Nombre Del Plan de Acción: ObjetivoDocument12 pagesFicha Del Plan de Acción PA 1 Nombre Del Plan de Acción: ObjetivoAlfredo De la TorreNo ratings yet
- Reservo RioDocument3 pagesReservo RioDayan Mantari AntonioNo ratings yet