You might also like
- 2 OpenCM9.04 Software PDFDocument45 pages2 OpenCM9.04 Software PDFErnesto Anguera RomerNo ratings yet
- OpenCM9.04 Hardware GuideDocument14 pagesOpenCM9.04 Hardware GuideErnesto Anguera RomerNo ratings yet
- OpenCM API ReferenceDocument34 pagesOpenCM API ReferenceErnesto Anguera Romer100% (1)
- 5 Appendix License PDFDocument2 pages5 Appendix License PDFErnesto Anguera RomerNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- (GUIDE) 1st Generation Intel HD Graphics QE:CI - Intel - InsanelyMac ForumDocument44 pages(GUIDE) 1st Generation Intel HD Graphics QE:CI - Intel - InsanelyMac Forumnono heryanaNo ratings yet
- 750-453, 750-455 4-Channel Analog Input Module 0 /4-20 Ma: Single-Ended (S.E.)Document1 page750-453, 750-455 4-Channel Analog Input Module 0 /4-20 Ma: Single-Ended (S.E.)Thomas BORNEYNo ratings yet
- TimeEdit M-IRELE 1 Master en Ing Nieur Civil Lectricien Finalit SP Cialis e Lectron... 2024-02-06 14 30Document15 pagesTimeEdit M-IRELE 1 Master en Ing Nieur Civil Lectricien Finalit SP Cialis e Lectron... 2024-02-06 14 30hung kungNo ratings yet
- Msdac Project1Document20 pagesMsdac Project1SGVU UniversityNo ratings yet
- Question Solving: Creative Design ECE-602Document14 pagesQuestion Solving: Creative Design ECE-602Mohan Krishna SuggunaNo ratings yet
- 75u50 SsdiDocument3 pages75u50 SsdiArnold DuarteNo ratings yet
- Eagle RLB150Document5 pagesEagle RLB150Vitor TorresNo ratings yet
- ODM POLQA and ODM Digital Audio PDFDocument6 pagesODM POLQA and ODM Digital Audio PDFLê Thế ViệtNo ratings yet
- Performance Analysis of Vehicular Ad Hoc Network (VANET) Considering Different Scenarios of A CityDocument7 pagesPerformance Analysis of Vehicular Ad Hoc Network (VANET) Considering Different Scenarios of A CityJahir UddinNo ratings yet
- Electronics Mini Dictionary by GadgetronicxDocument49 pagesElectronics Mini Dictionary by GadgetronicxObby JhonNo ratings yet
- D D D D D D: RC4580 Dual Audio Operational AmplifierDocument14 pagesD D D D D D: RC4580 Dual Audio Operational AmplifierMatias AyalaNo ratings yet
- DSASW0071941Document68 pagesDSASW0071941ali mohammedNo ratings yet
- SEng 3102 Multimedia Assignment Group ReportDocument18 pagesSEng 3102 Multimedia Assignment Group ReportElisaNo ratings yet
- Ultrasync Relay Expansion Modules: Um-R4 & Um-R10Document2 pagesUltrasync Relay Expansion Modules: Um-R4 & Um-R10Omar Andres Novoa MartinezNo ratings yet
- Fluke 5100b ManualDocument335 pagesFluke 5100b ManualBalitek InstrumentosNo ratings yet
- M.N.N. Appaji: M.SC (IT), M.B.A. (Finance), MCTS, MCP, CEHDocument44 pagesM.N.N. Appaji: M.SC (IT), M.B.A. (Finance), MCTS, MCP, CEHM N N AppajiNo ratings yet
- Ddec III-IV Single Ecm Troubleshooting GuideDocument12 pagesDdec III-IV Single Ecm Troubleshooting GuideLuis JesusNo ratings yet
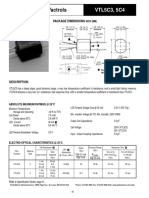
- Low Cost Axial Vactrols: VTL5C3, 5C4Document2 pagesLow Cost Axial Vactrols: VTL5C3, 5C4sillyNo ratings yet
- Metering Panel SpecificationsDocument5 pagesMetering Panel Specificationsenghossam8No ratings yet
- Guidebook For Optical Time Domain ReflectometerDocument12 pagesGuidebook For Optical Time Domain ReflectometerkumarsachinguptaNo ratings yet
- Radio User 2021 011 - NovemberDocument66 pagesRadio User 2021 011 - NovemberAl KNo ratings yet
- How To Calibrate Your Equipment Using Color BarsDocument6 pagesHow To Calibrate Your Equipment Using Color BarsAnirban GhoseNo ratings yet
- Lock in AmplifierDocument4 pagesLock in AmplifierMehdi NaderiNo ratings yet
- Network Check ACS880-04-585A-3: Network and Transformer Data Supply Unit DataDocument2 pagesNetwork Check ACS880-04-585A-3: Network and Transformer Data Supply Unit DataKrishna JashaNo ratings yet
- 10EE64 DIGITAL SIGNAL PROCESSING Syllabus PDFDocument1 page10EE64 DIGITAL SIGNAL PROCESSING Syllabus PDFSunil PatilNo ratings yet
- 1UDC CatalogueDocument6 pages1UDC CatalogueGamatronicNo ratings yet
- Dpa Iii Plus and Dpa Ii Plus Quick Start Guide: A. Connecting The DPADocument2 pagesDpa Iii Plus and Dpa Ii Plus Quick Start Guide: A. Connecting The DPAJoffre Lautaro Benavides SeminarioNo ratings yet
- 8th Sem ProjectDocument29 pages8th Sem ProjectRashmi B ReddyNo ratings yet
- Release Notes: Grid SolutionsDocument66 pagesRelease Notes: Grid SolutionsRONALDNo ratings yet
- Atx and p4 Power SuppliesDocument6 pagesAtx and p4 Power SuppliesSantosh DevadeNo ratings yet