You might also like
- CS31 Code ExamplesDocument1 pageCS31 Code Examplessharmanator99No ratings yet
- cs386 - Notes 7Document13 pagescs386 - Notes 7sharmanator99No ratings yet
- Pset 3Document3 pagesPset 3sharmanator99No ratings yet
- Digital Morse Code Decoder Design Lab 1Document4 pagesDigital Morse Code Decoder Design Lab 1sharmanator99No ratings yet
- Dis 1H - Week 4Document21 pagesDis 1H - Week 4sharmanator99No ratings yet
- EE M16 Problem Set 1Document8 pagesEE M16 Problem Set 1sharmanator99No ratings yet
- MATH 52, FALL 2007 - SOLUTIONS TO HOMEWORK 6Document4 pagesMATH 52, FALL 2007 - SOLUTIONS TO HOMEWORK 6sharmanator99No ratings yet
- Bio HWDocument1 pageBio HWsharmanator99No ratings yet
- Arithmetic and Logical OperationsDocument20 pagesArithmetic and Logical OperationsAmna IqbalNo ratings yet
- Exam1practicesolutions PDFDocument4 pagesExam1practicesolutions PDFAyah Al-AnaniNo ratings yet
- 11 U3 Ws 4Document2 pages11 U3 Ws 4sharmanator99No ratings yet
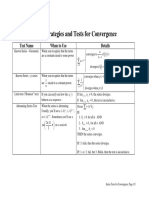
- Series Strategies and Tests For Convergence: Test Name When To Use DetailsDocument3 pagesSeries Strategies and Tests For Convergence: Test Name When To Use Detailssharmanator99No ratings yet
- WS 1.3 solutions acceleration distance speed problemsDocument2 pagesWS 1.3 solutions acceleration distance speed problemssharmanator99No ratings yet
- Annotated BibliographyDocument2 pagesAnnotated Bibliographysharmanator99No ratings yet
- Tests for Convergence and Divergence of SeriesDocument1 pageTests for Convergence and Divergence of Seriessharmanator99No ratings yet
- Some Things About StringsDocument2 pagesSome Things About Stringssharmanator99No ratings yet
- Project 4 Test DataDocument5 pagesProject 4 Test Datasharmanator99No ratings yet
- Presentation On Indira GandhiDocument9 pagesPresentation On Indira Gandhisharmanator99No ratings yet
- Final Exam Cheat SheetDocument3 pagesFinal Exam Cheat Sheetsharmanator99No ratings yet
- Math 32a Homework 3Document1 pageMath 32a Homework 3sharmanator99No ratings yet
- Post LabDocument1 pagePost Labsharmanator99No ratings yet
- ACM RefguideDocument3 pagesACM RefguideJorge MaldonadoNo ratings yet
- Philanthropy Project - Indian Army Veteran InitiativeDocument4 pagesPhilanthropy Project - Indian Army Veteran Initiativesharmanator99No ratings yet
- Debate Genderless ChildDocument2 pagesDebate Genderless Childsharmanator99No ratings yet
- Debate Genderless ChildDocument2 pagesDebate Genderless Childsharmanator99No ratings yet
- Statistics Chapter 4 Notes Section 4.1 Designing Studies: Definition: Population and SampleDocument6 pagesStatistics Chapter 4 Notes Section 4.1 Designing Studies: Definition: Population and Samplesharmanator99No ratings yet
- Orwell Rhetorical PrecisDocument1 pageOrwell Rhetorical Precissharmanator99No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- GTR CU Lecture NotesDocument64 pagesGTR CU Lecture NotesSagnik MisraNo ratings yet
- 2.3.6 Geometry Menu: Menu Item Description ShortcutDocument9 pages2.3.6 Geometry Menu: Menu Item Description Shortcutpraj24083302No ratings yet
- Willmore Surfaces: U. Pinkall and I. SterlingDocument6 pagesWillmore Surfaces: U. Pinkall and I. SterlingpinkallNo ratings yet
- Advanced MSC - Patran ExercisesDocument444 pagesAdvanced MSC - Patran ExercisesAlex da Silva100% (3)
- MineSight - Part7 - Solid ModellingDocument19 pagesMineSight - Part7 - Solid ModellingГ. НамуунNo ratings yet
- Map Projections IIDocument139 pagesMap Projections IIMeire SchmidtNo ratings yet
- The Mathematics of Three-Dimensional Manifolds: by William Thurston and Jeffrey WeeksDocument14 pagesThe Mathematics of Three-Dimensional Manifolds: by William Thurston and Jeffrey WeeksjohnNo ratings yet
- EFX Framework Assembly DesignDocument78 pagesEFX Framework Assembly DesignFareedMohmedNo ratings yet
- CATIA E-Slate CirrculumDocument8 pagesCATIA E-Slate CirrculumSantu SanthoshNo ratings yet
- Catia Exercises With Image Aid ExplanationDocument38 pagesCatia Exercises With Image Aid ExplanationKaran KatochNo ratings yet
- ED7102-Computer Applications in DesignDocument11 pagesED7102-Computer Applications in DesignLOGANTKEC100% (2)
- Femap 11.1 New FeaturesDocument88 pagesFemap 11.1 New FeaturesdouglascoombsNo ratings yet
- Deleuze Guattari Neuroscience - Murphie - Draft PDFDocument48 pagesDeleuze Guattari Neuroscience - Murphie - Draft PDFAnonymous pZ2FXUycNo ratings yet
- GDTDocument38 pagesGDTAntonio CervantesNo ratings yet
- Integrals in 8.02 PhysicsDocument21 pagesIntegrals in 8.02 Physicsanon_995042985No ratings yet
- Shades and Shadows in Orthographic ViewsDocument26 pagesShades and Shadows in Orthographic ViewsAshwin PrakashNo ratings yet
- Mesh BasicsDocument45 pagesMesh BasicsS.M. Atiqur RahmanNo ratings yet
- Eva Hackmann and Claus Lammerzahl - Geodesic Equation in Schwarzschild - (Anti-) de Sitter Space-Times: Analytical Solutions and ApplicationsDocument22 pagesEva Hackmann and Claus Lammerzahl - Geodesic Equation in Schwarzschild - (Anti-) de Sitter Space-Times: Analytical Solutions and ApplicationsGijke3No ratings yet
- Prepositions of LocationDocument8 pagesPrepositions of LocationIndah PriliatyNo ratings yet
- Topology Oxford NotesDocument55 pagesTopology Oxford NotesAsher BryantNo ratings yet
- PTC Pro-Engineer Wildfire 5.0Document159 pagesPTC Pro-Engineer Wildfire 5.0SeanKerslakeNo ratings yet
- Kiehn-Article-Topology and Topological Evolution of Clasic Electromagnetic Fields-1998Document36 pagesKiehn-Article-Topology and Topological Evolution of Clasic Electromagnetic Fields-1998Anonymous 9rJe2lOskxNo ratings yet
- Fotini Markopoulou and Isabeau Premont-Schwarz - Conserved Topological Defects in Non-Embedded Graphs in Quantum GravityDocument43 pagesFotini Markopoulou and Isabeau Premont-Schwarz - Conserved Topological Defects in Non-Embedded Graphs in Quantum GravityMopadDeluxeNo ratings yet
- UDT Commands in RhinoDocument34 pagesUDT Commands in RhinoJorge GuzmanNo ratings yet
- Solucionario GamelinDocument719 pagesSolucionario GamelinJhon Fabio ZuñigaNo ratings yet
- Power MillDocument158 pagesPower Millazadsingh1100% (3)
- Data Exchange InterfacesDocument212 pagesData Exchange InterfacesagrbovicNo ratings yet
- 00 - User Manual - Contents PDFDocument16 pages00 - User Manual - Contents PDFDaniel ManoliNo ratings yet
- CATIADocument3 pagesCATIAvadlamudi kathyayaniNo ratings yet