You might also like
- Control Systems - Lecture NoteDocument190 pagesControl Systems - Lecture NoteAbenezer AchamyelehNo ratings yet
- 8 System CompensationDocument6 pages8 System Compensationvidya_sagar826No ratings yet
- Ijeet: International Journal of Electrical Engineering & Technology (Ijeet)Document11 pagesIjeet: International Journal of Electrical Engineering & Technology (Ijeet)IAEME PublicationNo ratings yet
- 90 ThreeDocument10 pages90 ThreeMekonnen ShewaregaNo ratings yet
- Dynamics of Linear Systems: September 27, 2017Document101 pagesDynamics of Linear Systems: September 27, 2017RV SreehariNo ratings yet
- PE-3032 WK 1 Introduction TO CONTROL SYSTEM Feb 26 2015Document68 pagesPE-3032 WK 1 Introduction TO CONTROL SYSTEM Feb 26 2015Joshua OrlandaNo ratings yet
- Ambo University: Regulation and ControlDocument20 pagesAmbo University: Regulation and ControlFikadu EshetuNo ratings yet
- Classification of Control SystemsDocument15 pagesClassification of Control SystemsMohankumar V.No ratings yet
- Control SystemsDocument12 pagesControl Systemsoyebowale.emmanuelNo ratings yet
- Control 2Document87 pagesControl 2kibrom atsbhaNo ratings yet
- What Can Be Said About The Controllability and Observability Conditions If The Transfer Function Has PoleDocument6 pagesWhat Can Be Said About The Controllability and Observability Conditions If The Transfer Function Has PoleMengistu BirukeNo ratings yet
- Analysis and Implementation of Local Modular Supervisory Control For A Manufacturing Cell - A Case StudyDocument6 pagesAnalysis and Implementation of Local Modular Supervisory Control For A Manufacturing Cell - A Case StudyIAEME PublicationNo ratings yet
- Applied Sciences: A Hybrid Degradation Modeling and Prognostic Method For The Multi-Modal SystemDocument21 pagesApplied Sciences: A Hybrid Degradation Modeling and Prognostic Method For The Multi-Modal SystemsdfsdghNo ratings yet
- Practical Control of Electric Machines: Model-Based Design and SimulationFrom EverandPractical Control of Electric Machines: Model-Based Design and SimulationNo ratings yet
- Adaptive Fuzzy Controller: Application To The Control of The Temperature of A Dynamic Room in Real TimeDocument18 pagesAdaptive Fuzzy Controller: Application To The Control of The Temperature of A Dynamic Room in Real TimeLittle ChickNo ratings yet
- Real Time Application of Ants Colony Optimization: Dr.S.M.Girirajkumar Dr.K.Ramkumar Sanjay Sarma O.VDocument13 pagesReal Time Application of Ants Colony Optimization: Dr.S.M.Girirajkumar Dr.K.Ramkumar Sanjay Sarma O.VKarthik BalajiNo ratings yet
- Introduction To Modern Control Systems: It ChivornDocument27 pagesIntroduction To Modern Control Systems: It ChivornORK BUNSOKRAKMUNYNo ratings yet
- CSE Termwork-2018 - ALV - 2150909Document71 pagesCSE Termwork-2018 - ALV - 2150909Milan ModhawadiyaNo ratings yet
- Controle Digital para Aviões Comparação Analógico Excelente Fala Também Sobre Monitoramento Texto TraduzidoDocument20 pagesControle Digital para Aviões Comparação Analógico Excelente Fala Também Sobre Monitoramento Texto TraduzidoGardenia AndradeNo ratings yet
- Designof Model Predictive Controllerfor Pasteurization ProcessDocument9 pagesDesignof Model Predictive Controllerfor Pasteurization ProcessMaman GocekNo ratings yet
- Easychair Preprint: Mohamad Syafiq Azwan Mohd NorDocument5 pagesEasychair Preprint: Mohamad Syafiq Azwan Mohd NorJaime VargasNo ratings yet
- Control Systems NotesDocument50 pagesControl Systems NotesEEE CRRNo ratings yet
- Instrumentation Controls: What Is Instrumentation Technology?Document15 pagesInstrumentation Controls: What Is Instrumentation Technology?mahesh4975No ratings yet
- Mec522 Part IDocument87 pagesMec522 Part IFizz AzmiNo ratings yet
- Control-Systems - FINAL -محاضرات 2019-2020Document100 pagesControl-Systems - FINAL -محاضرات 2019-2020الزهور لخدمات الانترنيتNo ratings yet
- Performance Analysis of A Flexible Manufacturing System: A Statistical ApproachDocument13 pagesPerformance Analysis of A Flexible Manufacturing System: A Statistical ApproachAmrik SinghNo ratings yet
- Pressure Control in Production LineDocument10 pagesPressure Control in Production LineIJRASETPublicationsNo ratings yet
- Hardware/software Architecture For Adaptive Control SystemsDocument10 pagesHardware/software Architecture For Adaptive Control SystemsMirela VasiloniNo ratings yet
- Case Study of Design of An Engine Control UnitDocument8 pagesCase Study of Design of An Engine Control UnitsonirocksNo ratings yet
- 11 441 1 PBDocument6 pages11 441 1 PBkkaytugNo ratings yet
- Nature-Inspired Optimization Algorithms for Fuzzy Controlled Servo SystemsFrom EverandNature-Inspired Optimization Algorithms for Fuzzy Controlled Servo SystemsNo ratings yet
- Design of Automatic Control System For Cooling Unit Using Fuzzy Logic ControllerDocument21 pagesDesign of Automatic Control System For Cooling Unit Using Fuzzy Logic Controllerمحمد القاضيNo ratings yet
- Term PaperDocument9 pagesTerm PaperJake YaoNo ratings yet
- Low Power VLSI Architectures For Digital PID Controller ApplicationsDocument8 pagesLow Power VLSI Architectures For Digital PID Controller ApplicationsAbrar Ul HaqNo ratings yet
- Semi-Markov Models: Control of Restorable Systems with Latent FailuresFrom EverandSemi-Markov Models: Control of Restorable Systems with Latent FailuresNo ratings yet
- Speed and Position Control of DC Motor Using LabVIEW-IJRASETDocument8 pagesSpeed and Position Control of DC Motor Using LabVIEW-IJRASETIJRASETPublicationsNo ratings yet
- Inductive Logic Programming ForDocument13 pagesInductive Logic Programming ForCS & ITNo ratings yet
- Low-Cost Adaptive Fuzzy Neural Prescribed PerformaDocument27 pagesLow-Cost Adaptive Fuzzy Neural Prescribed PerformaChemkhi Mohamed AliNo ratings yet
- Autotronics and Vehicle Intelligence : Aeng6205Document25 pagesAutotronics and Vehicle Intelligence : Aeng6205Abubaker MuzayinNo ratings yet
- 2 1 1620801086 Ijaerdjun20213Document6 pages2 1 1620801086 Ijaerdjun20213TJPRC PublicationsNo ratings yet
- LCS Basics Revesion PDFDocument3 pagesLCS Basics Revesion PDFrajeshmholmukheNo ratings yet
- Model Predictive Control Techniques For CSTR Using MatlabDocument9 pagesModel Predictive Control Techniques For CSTR Using MatlabJeeva MJNo ratings yet
- Am03 Ch1-27sep03 PDFDocument21 pagesAm03 Ch1-27sep03 PDFr0ssumNo ratings yet
- Control System 2Document36 pagesControl System 2RajeevSangamNo ratings yet
- Reinforcement-Learning-Based Damping Control SchemDocument14 pagesReinforcement-Learning-Based Damping Control SchemjamesNo ratings yet
- A Generalized Direct Approach For DesignDocument27 pagesA Generalized Direct Approach For DesignLê UyênNo ratings yet
- A Generalized Direct Approach For Designing FuzzyDocument28 pagesA Generalized Direct Approach For Designing Fuzzysaurabh puthalNo ratings yet
- PHD ACODocument13 pagesPHD ACOPrasadYadavNo ratings yet
- Introduction To Control SystemsDocument38 pagesIntroduction To Control Systemsearnest normanNo ratings yet
- Genetic Algorithm 2Document7 pagesGenetic Algorithm 2nirmal_inboxNo ratings yet
- Position Control of Servo Motor Using Fuzzy Logic ControllerDocument12 pagesPosition Control of Servo Motor Using Fuzzy Logic ControllerMahmudul BappiNo ratings yet
- Control Systems Engineering 5Document5 pagesControl Systems Engineering 5ANo ratings yet
- Optimization of Path Tracking RobotDocument5 pagesOptimization of Path Tracking Robotsyclops3No ratings yet
- Principles of Automatic ControlDocument26 pagesPrinciples of Automatic ControlMesut OzilNo ratings yet
- MechatronicsDocument112 pagesMechatronicsshivaramakrishna8790No ratings yet
- Prelim-MODULE 4Document5 pagesPrelim-MODULE 4Celimen, John Renz C.No ratings yet
- EXIDA: Estimating The Beta Factor 1Document7 pagesEXIDA: Estimating The Beta Factor 1Kareem RasmyNo ratings yet
- Root Locus 2Document16 pagesRoot Locus 2kibrom atsbhaNo ratings yet
- Defining A Class. Defining Methods Creating Objects. Accessing Class Members. This Keyword Static MembersDocument46 pagesDefining A Class. Defining Methods Creating Objects. Accessing Class Members. This Keyword Static Memberskibrom atsbhaNo ratings yet
- Chapter 4Document19 pagesChapter 4kibrom atsbhaNo ratings yet
- Chapter 1Document35 pagesChapter 1kibrom atsbhaNo ratings yet
- Chapter 6 PIDDocument43 pagesChapter 6 PIDkibrom atsbhaNo ratings yet
- D. Dubois, H. Prade (Auth.), M. J. Patyra, D. M. Mlynek (Eds.) - Fuzzy Logic - Implementation and Applications-Vieweg+Teubner Verlag (1996)Document325 pagesD. Dubois, H. Prade (Auth.), M. J. Patyra, D. M. Mlynek (Eds.) - Fuzzy Logic - Implementation and Applications-Vieweg+Teubner Verlag (1996)bathaie_mohammadNo ratings yet
- Instrumentation Lab-2Document41 pagesInstrumentation Lab-2syed zainNo ratings yet
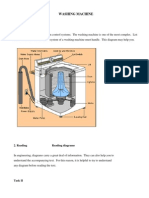
- Washing MachineDocument8 pagesWashing MachineHieu Nguyen TrungNo ratings yet
- Turbine Governing System - Electro Hydraulic Controller (Ehc)Document5 pagesTurbine Governing System - Electro Hydraulic Controller (Ehc)Venkatesan NNo ratings yet
- Pid Control PhilosophyDocument41 pagesPid Control PhilosophySivaprakashNo ratings yet
- Control Systems-1 PDFDocument8 pagesControl Systems-1 PDFmaheshbabu527No ratings yet
- BERNARD SD Range PDFDocument11 pagesBERNARD SD Range PDFamk2009No ratings yet
- Designing Robust Force Control Of: by Navid Niksefat and Nariman SepehriDocument12 pagesDesigning Robust Force Control Of: by Navid Niksefat and Nariman SepehriMiguel Andres Duran AlvarezNo ratings yet
- BALTEC Ecoline Brosch 05 15 enDocument12 pagesBALTEC Ecoline Brosch 05 15 ensandeepbhallaNo ratings yet
- Enin 2018Document5 pagesEnin 2018Phat Luu TienNo ratings yet
- Timing Belt PDFDocument4 pagesTiming Belt PDFAndiSubhanSyahPutraNo ratings yet
- POE Electric ActuatorDocument17 pagesPOE Electric ActuatorLizbeth Fiallos AvilaNo ratings yet
- Wiper SensorDocument7 pagesWiper SensorFaid MuzahidNo ratings yet
- Coke in ChinaDocument46 pagesCoke in ChinaKshitij AgarwalNo ratings yet
- 2008 Nissan Teana J32 Service Manual-HacDocument245 pages2008 Nissan Teana J32 Service Manual-HacMrihexNo ratings yet
- Sauer Danfoss PVEDocument44 pagesSauer Danfoss PVEdozer_kamil100% (2)
- Control Engineering R S SHEHUDocument50 pagesControl Engineering R S SHEHUMOSHOOD IBRAHIMNo ratings yet
- To Perform A Block Diagram Reduction Using MATLAB - Matlab ExamplesDocument5 pagesTo Perform A Block Diagram Reduction Using MATLAB - Matlab Examplesdanycg85No ratings yet
- Lab PLC 1Document33 pagesLab PLC 1Siti SarahNo ratings yet
- Satellite ControlDocument9 pagesSatellite ControlSingAnnNo ratings yet
- Onicon Flow MeterDocument38 pagesOnicon Flow Metersiva_nagesh_2No ratings yet
- Theoretical Analysis On Aircraft Gas Turbine Engine's Control UnitDocument6 pagesTheoretical Analysis On Aircraft Gas Turbine Engine's Control UnitJohnNo ratings yet
- Rehau Tech ManualDocument53 pagesRehau Tech ManualngrigoreNo ratings yet
- Control and Monitoring PointsDocument27 pagesControl and Monitoring Pointsamhosny64No ratings yet
- Sistema de Control 2Document98 pagesSistema de Control 2Esteban CastellanoNo ratings yet
- Central Control System ENGDocument27 pagesCentral Control System ENGsuriwaitsNo ratings yet
- Implementation of A PID Control System On Microcontroller (DC Motor Case Study)Document5 pagesImplementation of A PID Control System On Microcontroller (DC Motor Case Study)Monata Sera100% (1)
- Batch Management & Control (Including S88)Document2 pagesBatch Management & Control (Including S88)philongbkNo ratings yet
- SCADA MaterialDocument127 pagesSCADA Materialali mahmoud100% (1)
- IA - Assignment 1Document10 pagesIA - Assignment 1Jeevakirtan0% (1)