You might also like
- Capítulo 1 Basic Concepts - em - InglêsDocument49 pagesCapítulo 1 Basic Concepts - em - InglêsPaulinha BezerraNo ratings yet
- Astl CH1Document86 pagesAstl CH1fildzahsyafNo ratings yet
- Ee220 Expt1Document10 pagesEe220 Expt1pkn.11ee56No ratings yet
- Power System Representation - (Upto 09-02-16)Document16 pagesPower System Representation - (Upto 09-02-16)Shahab SaqibNo ratings yet
- Chapter 1 - 1Document29 pagesChapter 1 - 1Nour Ziad Ibrahim AlkurdiNo ratings yet
- ChaptersDocument56 pagesChaptersnagarajanNo ratings yet
- Basic Electrical by FarhanaDocument28 pagesBasic Electrical by FarhanaEr Rouf UlAlam BhatNo ratings yet
- Solution of Current in R-L-C Series CircuitsDocument9 pagesSolution of Current in R-L-C Series CircuitsDIVYANSH SINGHNo ratings yet
- BEEE NotesDocument8 pagesBEEE NotesSrinathReddyNo ratings yet
- BEE Lecture 14-15Document31 pagesBEE Lecture 14-15Jasmine HansdaNo ratings yet
- PITFINALDocument64 pagesPITFINALSandra WendamNo ratings yet
- Lecture Power System RepresentationDocument8 pagesLecture Power System RepresentationRaniel Rey CantorNo ratings yet
- Chapter TwoDocument23 pagesChapter TwoMagarsaa Qana'iiNo ratings yet
- Ch1 AC CurrentDocument23 pagesCh1 AC CurrentAhmed ElayanNo ratings yet
- Electronics-Tutorials - Ws-Power Factor CorrectionDocument18 pagesElectronics-Tutorials - Ws-Power Factor CorrectionfabiobonadiaNo ratings yet
- Some Terminology: Power and RMS Values Motors and GeneratorsDocument18 pagesSome Terminology: Power and RMS Values Motors and GeneratorsumamaheshwarraoNo ratings yet
- ELE 201 - RC CircuitsDocument26 pagesELE 201 - RC CircuitsIB MasterNo ratings yet
- Tsaadiquu PDFDocument31 pagesTsaadiquu PDFtadepeace23No ratings yet
- Lab EpsaDocument19 pagesLab Epsasemuty92No ratings yet
- Electric FundamentalDocument31 pagesElectric FundamentalKein Huat ChuaNo ratings yet
- ELEC331 Lab Experiment#1Document16 pagesELEC331 Lab Experiment#1DavidNo ratings yet
- Single Phase AC CircuitsDocument27 pagesSingle Phase AC Circuitskali hembramNo ratings yet
- Introduction To AC CircuitsDocument5 pagesIntroduction To AC CircuitsKeerthi Keerthana100% (1)
- Fundamentals of Power Systems PDFDocument13 pagesFundamentals of Power Systems PDFSurender ReddyNo ratings yet
- Alternating CurrentDocument68 pagesAlternating CurrentGovind Mani BhattNo ratings yet
- Electrical ImpedanceDocument14 pagesElectrical ImpedanceAndey HemanthNo ratings yet
- AC Notes1Document12 pagesAC Notes1Varun ChaudharyNo ratings yet
- EENG 352 Lec1 To 4Document62 pagesEENG 352 Lec1 To 4teresawamboi72No ratings yet
- AecDocument8 pagesAecGanesan KandasamyNo ratings yet
- Concept of A. C. CircuitsDocument11 pagesConcept of A. C. CircuitsAbhishekNo ratings yet
- Vce 1Document7 pagesVce 1Uppili RajuNo ratings yet
- Chapter 11 Balanced Three Phase CircuitsDocument35 pagesChapter 11 Balanced Three Phase CircuitsاغريسةNo ratings yet
- 7LABO Ganago Student Lab8Document37 pages7LABO Ganago Student Lab8Rocio Deidamia Puppi HerreraNo ratings yet
- Three PhaseDocument16 pagesThree Phaseeseose0701100% (3)
- 2536 TutorialSymmetrical AA 20120724Document98 pages2536 TutorialSymmetrical AA 20120724jbrenner85No ratings yet
- Power Triangle, Power Factor and Power Factor Correction MethodDocument10 pagesPower Triangle, Power Factor and Power Factor Correction MethodVedant SheshkerNo ratings yet
- BEEE 2marks (With Ans)Document25 pagesBEEE 2marks (With Ans)Nanda SubramanianNo ratings yet
- Pe Tutorial 4 PDFDocument7 pagesPe Tutorial 4 PDFkibrom atsbhaNo ratings yet
- Ybus Matrix With Regulating Transformer - Self Study TopicDocument21 pagesYbus Matrix With Regulating Transformer - Self Study TopicSankar MuthuswamyNo ratings yet
- Lab # 11Document4 pagesLab # 11Dadu DaduNo ratings yet
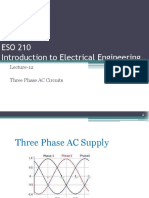
- ESO 210 Introduction To Electrical Engineering: Lecture-12 Three Phase AC CircuitsDocument45 pagesESO 210 Introduction To Electrical Engineering: Lecture-12 Three Phase AC CircuitsAmit MondalNo ratings yet
- Single Line To Ground Fault AnalysisDocument22 pagesSingle Line To Ground Fault AnalysisJoseph B Delos ReyesNo ratings yet
- Powers Ys 125Document19 pagesPowers Ys 125makroumNo ratings yet
- Electrical Power MeasurementDocument4 pagesElectrical Power MeasurementSurendra ReddyNo ratings yet
- Ch.2 AC NetworksDocument70 pagesCh.2 AC NetworksaattishNo ratings yet
- تجربة 4Document10 pagesتجربة 4alamryzhra62No ratings yet
- Fundamental of AC Circuits: by byDocument28 pagesFundamental of AC Circuits: by byGURMEHAK MIGLANINo ratings yet
- Bab 2 Inductors Capacitors and Alternating Current CircuitsDocument42 pagesBab 2 Inductors Capacitors and Alternating Current CircuitsVimal SaravananNo ratings yet
- Review of Basic Concepts - Professor J R Lucas 2.1 Single Phase PowerDocument9 pagesReview of Basic Concepts - Professor J R Lucas 2.1 Single Phase PowerNormanSulimaNo ratings yet
- With and Without Var CompensationDocument6 pagesWith and Without Var CompensationAdeniji OlusegunNo ratings yet
- Mod 3 Book 3 Ac TheoryDocument92 pagesMod 3 Book 3 Ac Theoryranjit prasadNo ratings yet
- A Comprehensive Research PaperDocument9 pagesA Comprehensive Research PaperInsik Agir ZernaNo ratings yet
- R, L and C Circuits PDFDocument42 pagesR, L and C Circuits PDFFasih Ul HaqNo ratings yet
- IV ConverterDocument16 pagesIV ConverterNeha SinghNo ratings yet
- Lecture Part 1Document9 pagesLecture Part 1fkb7hdvbznNo ratings yet
- AC Power Factor and Apparent Power PDFDocument8 pagesAC Power Factor and Apparent Power PDFAkshay GatkalNo ratings yet
- Chap 1Document84 pagesChap 1lvsaruNo ratings yet
- 26U RC Circuit W OscilloscopeDocument9 pages26U RC Circuit W OscilloscopeValeria MendozaNo ratings yet
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- Final Proposal For Oil and Gas AcademyDocument11 pagesFinal Proposal For Oil and Gas AcademyMohamad Abdulghani67% (3)
- Chapter One: 1.1 Phasor RepresentationDocument57 pagesChapter One: 1.1 Phasor RepresentationMohamad AbdulghaniNo ratings yet
- Construction Supervision Scope of WorkDocument4 pagesConstruction Supervision Scope of WorkMohamad Abdulghani86% (7)
- Construction Supervision Scope of WorkDocument4 pagesConstruction Supervision Scope of WorkMohamad Abdulghani86% (7)
- Amended Competition Document PMU Housing Project (Master-Plan and Buildings Design)Document15 pagesAmended Competition Document PMU Housing Project (Master-Plan and Buildings Design)Mohamad AbdulghaniNo ratings yet
- Ritesh AhyaDocument2 pagesRitesh Ahyagabbu_No ratings yet
- Ethernet Distributed Packet Switching For Local Computer Networks PDFDocument2 pagesEthernet Distributed Packet Switching For Local Computer Networks PDFJenNo ratings yet
- Timer/Counter/ Analyzer: Getting Started ManualDocument32 pagesTimer/Counter/ Analyzer: Getting Started Manualscorpion_l_81No ratings yet
- Sunny Tripower 5000TL / 6000TL / 7000TL / 8000TL / 9000TLDocument4 pagesSunny Tripower 5000TL / 6000TL / 7000TL / 8000TL / 9000TLKatharine FigueroaNo ratings yet
- Manual Epson c79 c90 c91 c92Document7 pagesManual Epson c79 c90 c91 c92Muhammad Syafi'i MahjuriNo ratings yet
- Um1905 Description of Stm32f7 Hal and Lowlayer Drivers StmicroelectronicsDocument2,236 pagesUm1905 Description of Stm32f7 Hal and Lowlayer Drivers StmicroelectronicsPedro FernandesNo ratings yet
- K 1128226404Document6 pagesK 1128226404Muhammad Ihsan RidwanNo ratings yet
- V7x DatasheetDocument4 pagesV7x DatasheetReginald D. De Guzman100% (1)
- Hot Wheels Manual V3 3Document60 pagesHot Wheels Manual V3 3claudiovaldezNo ratings yet
- SAP RS Quick Start ASE enDocument100 pagesSAP RS Quick Start ASE enMarshandaRamesNo ratings yet
- Aerzen D62S Blowers Rev 16-Apr PDFDocument188 pagesAerzen D62S Blowers Rev 16-Apr PDFFarid100% (1)
- Wide Swath Bathymetry and Side Scan Sonar Geoswath 4Document2 pagesWide Swath Bathymetry and Side Scan Sonar Geoswath 4Mihai DragomirNo ratings yet
- Softmod Installer Deluxe v5 11 ManualDocument32 pagesSoftmod Installer Deluxe v5 11 ManualWilfredy NunezNo ratings yet
- Came Yo ManualDocument56 pagesCame Yo ManualkaliexpertNo ratings yet
- New ProjectDocument13 pagesNew ProjectAnkit Kushwaha0% (1)
- Definite and Indefinite Articles Grammar Guides Reading Comprehension Exercises Rol - 46876Document2 pagesDefinite and Indefinite Articles Grammar Guides Reading Comprehension Exercises Rol - 46876Aleksandra Krstovska100% (3)
- VNX - Su Skoda 105S 105L 120L 120LE 120LS 120LSE Workshop Manual 1980 PDFDocument238 pagesVNX - Su Skoda 105S 105L 120L 120LE 120LS 120LSE Workshop Manual 1980 PDFscodaman100% (7)
- Intelligent Fire Alarm Control Panel Fx-2003-6Ds-16Led: FeaturesDocument4 pagesIntelligent Fire Alarm Control Panel Fx-2003-6Ds-16Led: FeaturesJuan CastilloNo ratings yet
- OSD User Manual V151Document55 pagesOSD User Manual V151hanyalramadyNo ratings yet
- Dell Laptop InstructionsDocument31 pagesDell Laptop InstructionsSumanth KollaNo ratings yet
- History of Esports How It All Began - Reading B2 EnglishDocument4 pagesHistory of Esports How It All Began - Reading B2 EnglishAnetaNo ratings yet
- Kochan, Stephen G. & Patrick Wood. 2017. Shell Programming in Unix, Linux and OS XDocument397 pagesKochan, Stephen G. & Patrick Wood. 2017. Shell Programming in Unix, Linux and OS XAnonymous 20JLxLjB6100% (1)
- Startup ManualDocument3 pagesStartup ManualProcurement PardisanNo ratings yet
- Computer System Servicing: TLE-Information and Communication TechnologyDocument14 pagesComputer System Servicing: TLE-Information and Communication TechnologyGemma MatobatoNo ratings yet
- Irda-Welder User Manual T-870aDocument15 pagesIrda-Welder User Manual T-870aRogertagalliuNo ratings yet
- DST 4600A: Electronic Control CardDocument2 pagesDST 4600A: Electronic Control Cardmuhammad arif100% (2)
- MC9S12DG256: 16-Bit MicrocontrollersDocument2 pagesMC9S12DG256: 16-Bit MicrocontrollersTomi OzzyNo ratings yet
- 09parts Cataloq 526102799 PDFDocument179 pages09parts Cataloq 526102799 PDFNatanael HernandezNo ratings yet
- Presentation For Computer ExhibitionDocument13 pagesPresentation For Computer ExhibitionBest VideosNo ratings yet