You might also like
- Processing Report: ImagesDocument7 pagesProcessing Report: Imagesk0zminNo ratings yet
- Coba Report UavDocument8 pagesCoba Report UavSIE LOGAM DAN BATUBARA DESDM SUMBARNo ratings yet
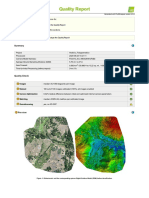
- Quality Report: Calibration DetailsDocument4 pagesQuality Report: Calibration Detailskana ngalamNo ratings yet
- Quality Report: Calibration DetailsDocument5 pagesQuality Report: Calibration DetailsGeodrones LimaNo ratings yet
- Drone ReportDocument6 pagesDrone Reporthanif0404No ratings yet
- Quality Report: Calibration DetailsDocument4 pagesQuality Report: Calibration DetailsKélibiano FirasNo ratings yet
- LOS CARASKM16 - ReportDocument8 pagesLOS CARASKM16 - ReportStalin CoralNo ratings yet
- Quality Report: Calibration DetailsDocument7 pagesQuality Report: Calibration Detailsjaretd martinezNo ratings yet
- Informe de Calidad Lev DronDocument9 pagesInforme de Calidad Lev DronAdrian Vasquez BerrezuetaNo ratings yet
- Quality Report: Calibration DetailsDocument5 pagesQuality Report: Calibration DetailsAlmubaraq Ratomi PrasadNo ratings yet
- Quality Report: Calibration DetailsDocument7 pagesQuality Report: Calibration DetailsfaridNo ratings yet
- Ilovepdf MergedDocument62 pagesIlovepdf MergedMaria Alejandra VivancoNo ratings yet
- Quality Report: Generated With Pix4Dmapper Version 4.5.6Document11 pagesQuality Report: Generated With Pix4Dmapper Version 4.5.6Alex Jaime Chaurra DiazNo ratings yet
- TANGANA ReportDocument9 pagesTANGANA ReportFrank Morales TomyNo ratings yet
- Proyecto Lima Practica - ReportDocument8 pagesProyecto Lima Practica - ReportJJorge Pacheco LauraNo ratings yet
- Serranopolis Do Iguacu ReportDocument8 pagesSerranopolis Do Iguacu ReportDouglas MarquesNo ratings yet
- Cholchol ReportDocument9 pagesCholchol ReportdiazsaezNo ratings yet
- GAMORURO TUTO ReportDocument6 pagesGAMORURO TUTO ReportSanty NorNo ratings yet
- Quality Report: Calibration DetailsDocument7 pagesQuality Report: Calibration DetailseduardoNo ratings yet
- Kit GD Phantom4 PPK ReportDocument8 pagesKit GD Phantom4 PPK ReportmarksNo ratings yet
- Quality Report: Generated With Pix4Denterprise Version 4.4.12Document9 pagesQuality Report: Generated With Pix4Denterprise Version 4.4.12jaretd martinezNo ratings yet
- Quality Report: Generated With Pix4Dmapper Version 4.5.6Document8 pagesQuality Report: Generated With Pix4Dmapper Version 4.5.6Fernanda HerediaNo ratings yet
- Procesamiento Casa - ReportDocument9 pagesProcesamiento Casa - ReportPepe casoNo ratings yet
- Projekt 2 1 Be DH 9 ReportDocument7 pagesProjekt 2 1 Be DH 9 ReportvbirrNo ratings yet
- SOLANO ReportDocument7 pagesSOLANO ReportStalin CoralNo ratings yet
- PARTMEDIA ReportDocument12 pagesPARTMEDIA ReportStalin CoralNo ratings yet
- Project 2024 02 29T00 - 43 - 38.049Z - ReportDocument10 pagesProject 2024 02 29T00 - 43 - 38.049Z - ReportYordi Baca HerreraNo ratings yet
- Reporte OrtomosaicoDocument8 pagesReporte OrtomosaicoArdila YezidNo ratings yet
- Quality Report: Calibration DetailsDocument10 pagesQuality Report: Calibration DetailsjesNo ratings yet
- Rs Tambopata ReportDocument7 pagesRs Tambopata ReportGMBRUMELNo ratings yet
- Quiality - Report - Proyecto-01Document10 pagesQuiality - Report - Proyecto-01carlos alradoado calderonNo ratings yet
- Quality Report: Calibration DetailsDocument4 pagesQuality Report: Calibration DetailsGeosan LtdaNo ratings yet
- PUENTE IBARRA - ReportDocument9 pagesPUENTE IBARRA - ReportStalin CoralNo ratings yet
- SANJACINTO3D ReportDocument8 pagesSANJACINTO3D ReportStalin CoralNo ratings yet
- 02.05. Reporte de CalidadDocument9 pages02.05. Reporte de Calidadjacqueline roxana cadillo giraldoNo ratings yet
- Mappa Demonstrativo Report PDFDocument10 pagesMappa Demonstrativo Report PDFMarcos PerliNo ratings yet
- Tambo de Mora - ReportDocument12 pagesTambo de Mora - ReportAlberto Chávez AngelesNo ratings yet
- Informe Pix4D PresaHooverDocument27 pagesInforme Pix4D PresaHooverJERIIKINNo ratings yet
- Quality Report: Calibration DetailsDocument11 pagesQuality Report: Calibration DetailsVinicius PaulinoNo ratings yet
- Reporte HuanucDocument15 pagesReporte HuanucLalex Torres TorresNo ratings yet
- Sinohidroo Report 1Document12 pagesSinohidroo Report 1Wilfredo TejerinaNo ratings yet
- Informe Tarea 3Document10 pagesInforme Tarea 3Miguel angel BarreroNo ratings yet
- Experimental Study of Measurement Errors in 3D-DIC Due To Out-of-Plane Specimen RotationDocument5 pagesExperimental Study of Measurement Errors in 3D-DIC Due To Out-of-Plane Specimen RotationRafael RodriguezNo ratings yet
- Quality Report: Calibration DetailsDocument7 pagesQuality Report: Calibration Detailsdanb1No ratings yet
- (1.) Basics & ApplicationsDocument30 pages(1.) Basics & Applicationsnithin sri sarveswarNo ratings yet
- Trial BingaDocument5 pagesTrial Bingaishwar joshiNo ratings yet
- ODM Quality Report: Dataset SummaryDocument6 pagesODM Quality Report: Dataset SummaryPAVEL RAMON CASTILLA HUAMANNo ratings yet
- Processing Report Novikucakucica Merged ChunkDocument6 pagesProcessing Report Novikucakucica Merged ChunkJosip KovilićNo ratings yet
- AdadasdaDocument6 pagesAdadasdaShyein AlfariziNo ratings yet
- DIP Part2Document30 pagesDIP Part2zaitunaNo ratings yet
- ODM Quality Report: Dataset SummaryDocument6 pagesODM Quality Report: Dataset SummaryPAVEL RAMON CASTILLA HUAMANNo ratings yet
- Block - 1 - at - Quality ReportDocument8 pagesBlock - 1 - at - Quality ReportrandomeoNo ratings yet
- TrenDocument6 pagesTrenEnde LLoisNo ratings yet
- Chapter 2 - Basic Techniques in Image ProcessingDocument90 pagesChapter 2 - Basic Techniques in Image ProcessingVo ToanNo ratings yet
- FALLSEM2022-23 CSE4019 ETH VL2022230104728 2022-08-03 Reference-Material-IDocument72 pagesFALLSEM2022-23 CSE4019 ETH VL2022230104728 2022-08-03 Reference-Material-ISRISHTI ACHARYYA 20BCE2561No ratings yet
- Lidlidda, Ilocos SurDocument6 pagesLidlidda, Ilocos SurKenneth T. GuillermoNo ratings yet
- (Referensi Bilinear) Image Scaling Comparison Using Universal Image Quality IndexDocument5 pages(Referensi Bilinear) Image Scaling Comparison Using Universal Image Quality IndexMuhamad LuqmanNo ratings yet
- AN IMPROVED TECHNIQUE FOR MIX NOISE AND BLURRING REMOVAL IN DIGITAL IMAGESFrom EverandAN IMPROVED TECHNIQUE FOR MIX NOISE AND BLURRING REMOVAL IN DIGITAL IMAGESNo ratings yet
- Stockpile Volume Whitepaper PDFDocument9 pagesStockpile Volume Whitepaper PDFIsmael CoulibalyNo ratings yet
- SIFT - The Scale Invariant Feature TransformDocument62 pagesSIFT - The Scale Invariant Feature TransformIsmael CoulibalyNo ratings yet
- SiftDocument62 pagesSiftIsmael CoulibalyNo ratings yet
- SIFT - The Scale Invariant Feature TransformDocument62 pagesSIFT - The Scale Invariant Feature TransformIsmael CoulibalyNo ratings yet
- Instruction Manual Mount Change Instructions Zeiss Cinema Zoom LensesDocument24 pagesInstruction Manual Mount Change Instructions Zeiss Cinema Zoom LensesdimodimoNo ratings yet
- 034 SwimDocument11 pages034 SwimFeng LiNo ratings yet
- Haynayan Days 2016 Literary Events GuidelineDocument9 pagesHaynayan Days 2016 Literary Events GuidelineLardel CarayNo ratings yet
- Night Vision SystemDocument18 pagesNight Vision SystemSarang r Bire0% (1)
- CPAR Artistic Skills and Techniques 2nd QuarterDocument15 pagesCPAR Artistic Skills and Techniques 2nd QuarterJohn Benedict AlbayNo ratings yet
- Blaupunkt-Manual-Vollv Android4.1 800 NGDocument44 pagesBlaupunkt-Manual-Vollv Android4.1 800 NGkaptainkNo ratings yet
- Iphone 14 Pro Iphone 14 Pro Max: FinishDocument30 pagesIphone 14 Pro Iphone 14 Pro Max: Finishryan gutterNo ratings yet
- ImagineFX May 2017Document116 pagesImagineFX May 2017Anonymous qTUAQkqHML100% (5)
- Sirius New Brochure PDFDocument4 pagesSirius New Brochure PDFGokul Boss GamingNo ratings yet
- Khasoosiat Wa Fawaid e Quran PDFDocument338 pagesKhasoosiat Wa Fawaid e Quran PDFAwaies MohammadNo ratings yet
- Bezjian v. Kidsline - Pottery Barn PhotoDocument17 pagesBezjian v. Kidsline - Pottery Barn PhotoMark JaffeNo ratings yet
- Biology: PAPER 6 Alternative To PracticalDocument12 pagesBiology: PAPER 6 Alternative To Practicalmstudy1234560% (1)
- Mini YearBook ProjectDocument12 pagesMini YearBook Projectrmatthews21No ratings yet
- The Heart of The Hills. The History of Sassafras Primary School Number 3222 and Its Place in The Sassafras Community For 120 Years: 1894-2014 Rowan SmithDocument115 pagesThe Heart of The Hills. The History of Sassafras Primary School Number 3222 and Its Place in The Sassafras Community For 120 Years: 1894-2014 Rowan SmithRowan SmithNo ratings yet
- Minolta Ep4000Document392 pagesMinolta Ep4000kostas_san50% (2)
- Batik - Art and Craft (Art Ebook)Document76 pagesBatik - Art and Craft (Art Ebook)Muhiddin Chandra100% (1)
- Witchblade 1x01 - Pilot (1999)Document90 pagesWitchblade 1x01 - Pilot (1999)toonfactoryNo ratings yet
- Color Temperature in DrawingDocument5 pagesColor Temperature in DrawingdocudaNo ratings yet
- L38111 (Kunlun2) MB Schemetics L3 RepairDocument45 pagesL38111 (Kunlun2) MB Schemetics L3 RepairMilson MenezesNo ratings yet
- Byron Kirk, Press ReleaseDocument3 pagesByron Kirk, Press ReleaseByron KirkNo ratings yet
- Pakhtunkhwa Highways Authority (Pkha) : Eligibility CriteriaDocument4 pagesPakhtunkhwa Highways Authority (Pkha) : Eligibility CriteriaAdnanAlamKhanNo ratings yet
- McNeish 1970. Second Annual Report of The Ayaucho Archaeological Botanical ProjectDocument60 pagesMcNeish 1970. Second Annual Report of The Ayaucho Archaeological Botanical ProjectHenry TantaleánNo ratings yet
- MorphemesDocument18 pagesMorphemesmufidolaNo ratings yet
- Breakthrough DNA FREE REPORT PDFDocument33 pagesBreakthrough DNA FREE REPORT PDFJuan Isaac100% (1)
- Tutorial For PinterestDocument166 pagesTutorial For PinterestLeandroSabadoNo ratings yet
- Analysis of Edward Albees The Zoo StoryDocument6 pagesAnalysis of Edward Albees The Zoo StoryGabriela Macarei100% (1)
- B-300 308 500DN 508DN 310N 318N 510DN 518DN e PDFDocument208 pagesB-300 308 500DN 508DN 310N 318N 510DN 518DN e PDFAlejandro Aguirre0% (1)
- Phocus 3.7.3 Mac Read MeDocument4 pagesPhocus 3.7.3 Mac Read MeaysegulkumNo ratings yet
- Wins Offer Letter by JohnDocument6 pagesWins Offer Letter by JohnJohn Gurung100% (3)
- Kodak Photography Books 1997Document8 pagesKodak Photography Books 1997Erden Sizgek100% (2)