You might also like
- Motores 3306-3406Document44 pagesMotores 3306-3406Hening Edison TC90% (10)
- Centro Instantáneo de Velocidad CeroDocument13 pagesCentro Instantáneo de Velocidad CeroMan Ga Pe100% (1)
- Ejercicios Empuje Hidrostatico ResueltoDocument12 pagesEjercicios Empuje Hidrostatico ResueltoErwin Borja100% (2)
- Partes Mecánicas Del Sistema de Enrollamiento de La TelaDocument7 pagesPartes Mecánicas Del Sistema de Enrollamiento de La TelaDaniela Lara50% (2)
- 16Document4 pages16Alex Andrango100% (1)
- 4.193 4.198Document3 pages4.193 4.198lll llll lllNo ratings yet
- Unidad 3. Vibraciones de Sistemas de Un Grado de Libertad Con Excitación Armónica.Document20 pagesUnidad 3. Vibraciones de Sistemas de Un Grado de Libertad Con Excitación Armónica.Uriel Perez Mazapila100% (3)
- Propiedades Térmicas de Los MaterialesDocument20 pagesPropiedades Térmicas de Los MaterialesRosa M. Horna VargasNo ratings yet
- Dinamica DeberDocument1 pageDinamica DeberKarlitaYadiraVelasquezNo ratings yet
- Proyecto CatapultaDocument23 pagesProyecto CatapultaResuelveloNo ratings yet
- Caja de Cambios Automatica PDFDocument28 pagesCaja de Cambios Automatica PDFHugo75% (4)
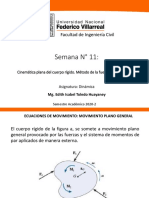
- Semana #11:: Facultad de Ingeniería CivilDocument13 pagesSemana #11:: Facultad de Ingeniería CivilRosa Elena Chero LecarnaqueNo ratings yet
- Fisica 3p PresentacionDocument3 pagesFisica 3p PresentacionAlex Palate0% (1)
- 1er Parcial ResistenciaDocument5 pages1er Parcial Resistenciaoscar portilla100% (1)
- De Todo OjooDocument53 pagesDe Todo OjooMichael Diaz100% (14)
- Disco 30Kg 20rad/sDocument5 pagesDisco 30Kg 20rad/sab1240No ratings yet
- Dinamica D e Cuerpo RigidoDocument24 pagesDinamica D e Cuerpo Rigidobecto67% (3)
- Semana 2 (RM)Document15 pagesSemana 2 (RM)Orlando Capristan100% (1)
- Vibraciones Mec.Document6 pagesVibraciones Mec.Marcos SanabriaNo ratings yet
- Movimientos armónicos simples de instrumentos de laboratorio en mesas agitadorasDocument34 pagesMovimientos armónicos simples de instrumentos de laboratorio en mesas agitadorasBaltazar EuanNo ratings yet
- 600 KWDocument13 pages600 KWmoussaNo ratings yet
- Dinam-Lab Nº8 y Nº9Document7 pagesDinam-Lab Nº8 y Nº9José AlvaroNo ratings yet
- Guía N°02 - Cinemática - Movimiento Plano GeneralDocument7 pagesGuía N°02 - Cinemática - Movimiento Plano GeneralMarcelo IgnacioNo ratings yet
- Energía cinética y trabajo en movimiento planoDocument22 pagesEnergía cinética y trabajo en movimiento planoAntonio Avendaño50% (2)
- Problemas Video Clase 15Document5 pagesProblemas Video Clase 15Lesly TejadaNo ratings yet
- Sesión 11 FLUIDOS - Conducción Forzada o Conducción en Régimen de Tubería G2Document23 pagesSesión 11 FLUIDOS - Conducción Forzada o Conducción en Régimen de Tubería G2Camilo Valentin Barrionuevo Castillo100% (2)
- Presentación 1Document6 pagesPresentación 1Victor Mora100% (1)
- 1 y 2Document1 page1 y 2Brah BrahNo ratings yet
- Formato APAGeneralDocument6 pagesFormato APAGeneralFernando LopezNo ratings yet
- Momento angular y conservaciónDocument11 pagesMomento angular y conservaciónCarlos Javier Zavaleta Flores100% (2)
- Segunda Ley de NewtonDocument10 pagesSegunda Ley de NewtonVinnie Barrientos Venancio0% (5)
- Problemario 3 y 4 DinamicaDocument52 pagesProblemario 3 y 4 DinamicaAngel Uriel Gomez SaldañaNo ratings yet
- Movimiento Curvilíneo, Componentes RectangularesDocument3 pagesMovimiento Curvilíneo, Componentes RectangularesWaldir Leyton Rondoy Cruz0% (1)
- Examen de Unidad 3, MECANICA DE FLUIDOSDocument4 pagesExamen de Unidad 3, MECANICA DE FLUIDOSPanchoEsquivelRamirezNo ratings yet
- Dinámica de mecanismos y ejercicios de velocidad y aceleraciónDocument12 pagesDinámica de mecanismos y ejercicios de velocidad y aceleraciónEduardo CseNo ratings yet
- Ejercicios de dinámicaDocument3 pagesEjercicios de dinámicaJosé Luis Santillán Tafur0% (3)
- DinamicaDocument11 pagesDinamicaAleeFloresNo ratings yet
- Dinámica de sistemas mecánicosDocument5 pagesDinámica de sistemas mecánicosFeliipe Tamayo100% (1)
- Practica Mec 213-Verano 2020 PDFDocument12 pagesPractica Mec 213-Verano 2020 PDFCristhian LNo ratings yet
- Investigación Momento de Inercia. Mario LagosDocument10 pagesInvestigación Momento de Inercia. Mario LagosWalter Meneses CordobaNo ratings yet
- El Movimiento de La Varilla AB Es Guiado Por Los Pasadores Puestos en Ay BDocument1 pageEl Movimiento de La Varilla AB Es Guiado Por Los Pasadores Puestos en Ay Byesse1996100% (1)
- Problemas PropuestosDocument3 pagesProblemas PropuestoscarlosNo ratings yet
- Condiciones de Frontera y Continuidad para Vigas Sujetas A FlexiónDocument13 pagesCondiciones de Frontera y Continuidad para Vigas Sujetas A FlexiónKevin Carmona RamirezNo ratings yet
- La Polea ExposicionDocument2 pagesLa Polea ExposicionandresNo ratings yet
- T4 Proes UgDocument54 pagesT4 Proes UgFranco Castillo Cerquin33% (3)
- Actividad 2Document4 pagesActividad 2Angie AillónNo ratings yet
- Práctica 2 Dinámica Cap 3 y Cap 4Document3 pagesPráctica 2 Dinámica Cap 3 y Cap 4Reyner Valerio Gonzales0% (1)
- Tutoria Dinámica 020419Document1 pageTutoria Dinámica 020419Kevin Ramos100% (1)
- Practica Calificada Caminos UCV VirtualDocument1 pagePractica Calificada Caminos UCV VirtualMauricio Monje Yovera100% (1)
- Taller S07 DinamicaDocument1 pageTaller S07 DinamicaDONAL YENEZ SALAZAR YANAYACONo ratings yet
- Movimiento ErraticoDocument2 pagesMovimiento ErraticoAlex Ulloa100% (2)
- Ejercicio 5 Centros InstantaneosDocument1 pageEjercicio 5 Centros InstantaneosMilton AcarapiNo ratings yet
- Informe Tercera Unidad - Escobedo Benites ValeryDocument31 pagesInforme Tercera Unidad - Escobedo Benites ValeryValery Escobedo BenitesNo ratings yet
- Monografia Miembros en Flexion, Corte, EetcDocument39 pagesMonografia Miembros en Flexion, Corte, EetcDeinner Jose Torres FalconNo ratings yet
- Taller 2 DinamicaDocument4 pagesTaller 2 DinamicaHernan Za0% (1)
- Trabajo y energía prácticaDocument2 pagesTrabajo y energía prácticaAlvinDiazNo ratings yet
- Centro Instantaneo de Velocidad CeroDocument2 pagesCentro Instantaneo de Velocidad CeroEdwinGuamanNo ratings yet
- Analisis Movimiento RelativoDocument11 pagesAnalisis Movimiento RelativoAdrian MejiasNo ratings yet
- Cinetica en El Plano de Un Cuerpo RigidoDocument20 pagesCinetica en El Plano de Un Cuerpo RigidoMarceloSarmientoCantosNo ratings yet
- 06 - Movimiento Plano Paralelo Del Cuerpo RigidoDocument31 pages06 - Movimiento Plano Paralelo Del Cuerpo RigidoTUmamaNo ratings yet
- Análisis de Movimiento Relativo - DinámicaDocument6 pagesAnálisis de Movimiento Relativo - DinámicaFreddy Zambrano BernardiNo ratings yet
- SESIÓN 08 - Cinemática Plana de Un Cuerpo Rígido Velocidad Absoluta y Relativa, Centro Instantáneo de Velocidad Cero, AceleracióDocument24 pagesSESIÓN 08 - Cinemática Plana de Un Cuerpo Rígido Velocidad Absoluta y Relativa, Centro Instantáneo de Velocidad Cero, AceleracióLeandro Guillen AguilarNo ratings yet
- Cinematica Plana de Un Cuerpo RigidoDocument57 pagesCinematica Plana de Un Cuerpo RigidoMijhael Anatholi Romero Mamani100% (1)
- Cinematica Plana de Un Cuerpo Rigido PDFDocument57 pagesCinematica Plana de Un Cuerpo Rigido PDFJonathanAndresNo ratings yet
- Movimientos planos de cuerpos rígidosDocument5 pagesMovimientos planos de cuerpos rígidosMaria Angelica Durango VargasNo ratings yet
- FORMATODocument2 pagesFORMATORosa M. Horna VargasNo ratings yet
- Costos y presupuestos de materialesDocument20 pagesCostos y presupuestos de materialesChrismel Cortez BeltránNo ratings yet
- Precioparticularinsumotipovtipo 2Document3 pagesPrecioparticularinsumotipovtipo 2Rosa M. Horna VargasNo ratings yet
- Expediente de La LosaDocument5 pagesExpediente de La LosaRosa M. Horna VargasNo ratings yet
- Crono A3Document3 pagesCrono A3Rosa M. Horna VargasNo ratings yet
- Propiedades AcusticasDocument20 pagesPropiedades AcusticasRosa M. Horna VargasNo ratings yet
- 6.bloque FDocument11 pages6.bloque FRosa M. Horna VargasNo ratings yet
- Centro Instantáneo de Velocidad CeroDocument4 pagesCentro Instantáneo de Velocidad CeroRosa M. Horna Vargas67% (3)
- Resistencia flexión concreto: ensayos, métodos, problemasDocument7 pagesResistencia flexión concreto: ensayos, métodos, problemasRoyerts Leo Callo PalominoNo ratings yet
- Cronograma ALBAÑILERÍA ODocument9 pagesCronograma ALBAÑILERÍA ORosa M. Horna VargasNo ratings yet
- Gastos Gnerales META 1Document3 pagesGastos Gnerales META 1Rosa M. Horna VargasNo ratings yet
- Precioparticularinsumotipovtipo 2Document3 pagesPrecioparticularinsumotipovtipo 2Rosa M. Horna VargasNo ratings yet
- Propiedades Térmicas de Los MaterialesDocument20 pagesPropiedades Térmicas de Los MaterialesRosa M. Horna VargasNo ratings yet
- Clases de ConcretoDocument16 pagesClases de ConcretoRosa M. Horna VargasNo ratings yet
- Redes Sociales GDocument2 pagesRedes Sociales GRosa M. Horna VargasNo ratings yet
- AgregadosDocument14 pagesAgregadosRosa M. Horna VargasNo ratings yet
- Memoria Descriptiva PlazaDocument11 pagesMemoria Descriptiva PlazaRosa M. Horna VargasNo ratings yet
- Calculo de ALABEODocument4 pagesCalculo de ALABEORosa M. Horna VargasNo ratings yet
- CaratDocument2 pagesCaratRosa M. Horna VargasNo ratings yet
- Parte 2Document1 pageParte 2Rosa M. Horna VargasNo ratings yet
- ReferenciasDocument2 pagesReferenciasRosa M. Horna VargasNo ratings yet
- Documento 056Document1 pageDocumento 056Rosa M. Horna VargasNo ratings yet
- LOCALDocument3 pagesLOCALRosa M. Horna VargasNo ratings yet
- Unidad DidácticaDocument2 pagesUnidad DidácticaRosa M. Horna VargasNo ratings yet
- Centro Instantáneo de Velocidad CeroDocument4 pagesCentro Instantáneo de Velocidad CeroRosa M. Horna Vargas67% (3)
- CuantificadoresDocument3 pagesCuantificadoresRosa M. Horna VargasNo ratings yet
- Modelos de ConfinamientoDocument13 pagesModelos de Confinamientonilebyem0% (1)
- Ensayo 03Document5 pagesEnsayo 03Rosa M. Horna VargasNo ratings yet
- Documento 02Document1 pageDocumento 02Rosa M. Horna VargasNo ratings yet
- Eequipo N°4 CorregidoDocument11 pagesEequipo N°4 CorregidoDaniel Jose Ortiz LopezNo ratings yet
- Bombas y Motores EléctricosDocument31 pagesBombas y Motores EléctricosAndres Felipe Cabrera BeltranNo ratings yet
- Equipos de SoldaduraDocument52 pagesEquipos de SoldaduraCindy Carolina Ciro100% (1)
- Reparacion Equipo Caminero Por Soldadura Al ArcoDocument10 pagesReparacion Equipo Caminero Por Soldadura Al ArcoNicolas ArboledaNo ratings yet
- FTV Basico Neumatico y FrenoDocument52 pagesFTV Basico Neumatico y FrenoH031678No ratings yet
- Caracteristicas de Los FluidosDocument3 pagesCaracteristicas de Los Fluidosapi-307087598100% (1)
- Informe de Autotronica 2 Practica 3 y 4 Eb190Document10 pagesInforme de Autotronica 2 Practica 3 y 4 Eb190Christian CarranzaNo ratings yet
- Núcleos y Muros EstructuralesDocument27 pagesNúcleos y Muros EstructuralesEdgardo MamaniNo ratings yet
- Práctica IDocument13 pagesPráctica ILevi LavayenNo ratings yet
- Evaluación física primer periodoDocument4 pagesEvaluación física primer periodoJudith Barragan Fonseca100% (1)
- Ejercicios Resueltos Ley de HookDocument7 pagesEjercicios Resueltos Ley de HookIkram SoualiNo ratings yet
- Manual Amperares Bombas Barnes N4 & N6 2015Document14 pagesManual Amperares Bombas Barnes N4 & N6 2015Carlos J OrozcoNo ratings yet
- 07c - Geotecnia - Presion Lateral - BDocument36 pages07c - Geotecnia - Presion Lateral - BAndres Matailo PuenteNo ratings yet
- Enfriador HidráulicoDocument46 pagesEnfriador HidráulicoJose Vidal100% (1)
- ICS1-00 - Rev 1Document21 pagesICS1-00 - Rev 1Julio Rosas PezoNo ratings yet
- Especificaciones Tecnicas de Agua I.E. Nº64093Document62 pagesEspecificaciones Tecnicas de Agua I.E. Nº64093JerssonRuizCastilloNo ratings yet
- Unidad I - Contenido - Hormigón Armado I - Cálculo de Losas, Vigas y PilaresDocument20 pagesUnidad I - Contenido - Hormigón Armado I - Cálculo de Losas, Vigas y PilaresGustavo TecheiraNo ratings yet
- Problemas de Generadores de Corriente ContinuaDocument4 pagesProblemas de Generadores de Corriente ContinuaNayleth J. Rodriguez H.100% (1)
- PITOC Anrrango Miranda NolivosDocument13 pagesPITOC Anrrango Miranda Nolivosnicky nolivosNo ratings yet
- Transmisión y tren motriz: documento sobre sistema 4WDDocument356 pagesTransmisión y tren motriz: documento sobre sistema 4WDroberto0padilla-5No ratings yet
- EjerciciosDocument2 pagesEjerciciosAugusto Taboada PalominoNo ratings yet
- Informe N°004-Pch. - 2022Document6 pagesInforme N°004-Pch. - 2022Ivan JLNo ratings yet
- DISEÑO ZAPATA Z1Document43 pagesDISEÑO ZAPATA Z1Ivan Ruidias PazNo ratings yet
- Motores monofásicos de inducciónDocument13 pagesMotores monofásicos de inducciónRodrigo Mamani Apaza100% (1)