You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Cambridge International As and A Level Mathematics Statistics Estadistica YprobabilidadDocument162 pagesCambridge International As and A Level Mathematics Statistics Estadistica YprobabilidadConservación EnergyNo ratings yet
- Music Math WorksheetDocument21 pagesMusic Math WorksheetjanelleiversNo ratings yet
- Hot RollingDocument223 pagesHot RollingINDRAJIT SAO100% (1)
- Grid Interface of Wind PowerDocument34 pagesGrid Interface of Wind PowerM Paul PrasadNo ratings yet
- SpiraxSarco-B2-Steam Engineering Principles and Heat TransferDocument186 pagesSpiraxSarco-B2-Steam Engineering Principles and Heat Transferdanenic100% (4)
- LOAD FREQUENCY CONTROL KEEPS GRID STABLEDocument5 pagesLOAD FREQUENCY CONTROL KEEPS GRID STABLEsrikaanth06100% (2)
- Microcontroller Controlled BLDC Drive for Electric VehiclesDocument4 pagesMicrocontroller Controlled BLDC Drive for Electric VehiclesAvinash Babu KmNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Sensorbased Control of Three Phase Brushless DC Motor PDFDocument8 pagesSensorbased Control of Three Phase Brushless DC Motor PDFmike_helplineNo ratings yet
- A New Topology For Unipolar Brushless DC Motor Drive With High Power FactorDocument8 pagesA New Topology For Unipolar Brushless DC Motor Drive With High Power FactorRagunathan NarayananNo ratings yet
- Single Phase Induction Motor Literature SurveyDocument6 pagesSingle Phase Induction Motor Literature SurveyBustanul ArifienNo ratings yet
- Calculation of Modulation Index of PWM Wave Form Feed To Inverter Feed Induction MotorDocument18 pagesCalculation of Modulation Index of PWM Wave Form Feed To Inverter Feed Induction MotorSathishkumar MalipeddiNo ratings yet
- Four Switch Three Phase Inverter Control of BLDC MotorDocument6 pagesFour Switch Three Phase Inverter Control of BLDC MotorBhargav Cho ChweetNo ratings yet
- PFC DC-DCDocument8 pagesPFC DC-DCmanda RamuNo ratings yet
- srm123 PDFDocument6 pagessrm123 PDFPathella SudhakarNo ratings yet
- Torque Ripple Minimization in BLDC Motor Using DC-DC Sepic ConverterDocument5 pagesTorque Ripple Minimization in BLDC Motor Using DC-DC Sepic ConverterShiju RamachandranNo ratings yet
- AVR492: Brushless DC Motor Control Using AT90PWM3: Application NoteDocument26 pagesAVR492: Brushless DC Motor Control Using AT90PWM3: Application NotenicoletabytaxNo ratings yet
- PWM Switching Strategy For Torque Ripple Minimization in BLDC MotorDocument6 pagesPWM Switching Strategy For Torque Ripple Minimization in BLDC MotorekaliappanNo ratings yet
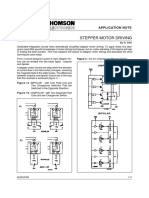
- Stepper Motor Driving: Application NoteDocument17 pagesStepper Motor Driving: Application NoteGonzalo RiosNo ratings yet
- Modes of Operation of Stepper MotorDocument17 pagesModes of Operation of Stepper MotorSoumik GhoshNo ratings yet
- Stepper Motor Driving: Application NoteDocument17 pagesStepper Motor Driving: Application NoteGonzalo RiosNo ratings yet
- Performance Improvement of Two Leg Inverter Fed BLDCM DriveDocument9 pagesPerformance Improvement of Two Leg Inverter Fed BLDCM DriveInternational Organization of Scientific Research (IOSR)No ratings yet
- A Five-Leg Inverter For Driving A Traction Motor and A Compressor MotorDocument7 pagesA Five-Leg Inverter For Driving A Traction Motor and A Compressor MotorTom BeanNo ratings yet
- Variable-Frequency Inverter For Speed Control of A Three-Phase MotorDocument7 pagesVariable-Frequency Inverter For Speed Control of A Three-Phase Motorsadegh karamyNo ratings yet
- 1 PDFDocument8 pages1 PDFB.Kailash Krishna PrasadNo ratings yet
- Feed Forward Controller For Compensation of DC-Link Capacitor Unbalance Voltages and Ripple Reduction Based BLDCM Drive SystemDocument6 pagesFeed Forward Controller For Compensation of DC-Link Capacitor Unbalance Voltages and Ripple Reduction Based BLDCM Drive SystemSiddharth Jayashekar KNo ratings yet
- Commutation Torque Ripple Reduction in BLDC Motor Using Modified SEPIC Converter and ThreeDocument2 pagesCommutation Torque Ripple Reduction in BLDC Motor Using Modified SEPIC Converter and ThreestarboyNo ratings yet
- Variable Frequency Drives in A Power Plant: SynopsisDocument22 pagesVariable Frequency Drives in A Power Plant: SynopsisReuben VargheseNo ratings yet
- Zero-Steady-State-Error Input-Current Controller For Regenerative Multilevel Converters Based On Single-Phase CellsDocument8 pagesZero-Steady-State-Error Input-Current Controller For Regenerative Multilevel Converters Based On Single-Phase CellssghfqweNo ratings yet
- 1.1 Voltage Source Converters (VSC) : TH THDocument12 pages1.1 Voltage Source Converters (VSC) : TH THSherif M. DabourNo ratings yet
- Harmonics and Torque Ripple Reduction of Brushless DC Motor by Using Cascaded H-Bridge Multilevel InverterDocument52 pagesHarmonics and Torque Ripple Reduction of Brushless DC Motor by Using Cascaded H-Bridge Multilevel Inverterharish100% (1)
- An Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterDocument5 pagesAn Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterArghya MukherjeeNo ratings yet
- PFC Z-source CSC converter for BLDCM driveDocument7 pagesPFC Z-source CSC converter for BLDCM driveTechnos_IncNo ratings yet
- Speed Control of DC MotorDocument48 pagesSpeed Control of DC MotorVivek VickyNo ratings yet
- Researchpaper Simulation of Active Front End Converter Based VFD For Induction MotorsDocument6 pagesResearchpaper Simulation of Active Front End Converter Based VFD For Induction MotorsAnonymous zmV3UaG0TNo ratings yet
- Speed Control of DC Motor by Using PWM TechniqueDocument51 pagesSpeed Control of DC Motor by Using PWM TechniqueYuvraj GogoiNo ratings yet
- Requirement of Converter in Electric VehiclesDocument2 pagesRequirement of Converter in Electric VehiclesmaniNo ratings yet
- 00878876Document6 pages00878876jazzdeepakNo ratings yet
- Jeas 1012 796Document8 pagesJeas 1012 796Victor FurmanNo ratings yet
- v42 63Document5 pagesv42 63Bala KumarNo ratings yet
- Matrix Converter PhD Thesis OverviewDocument15 pagesMatrix Converter PhD Thesis OverviewAnonymous EnggrUsmNo ratings yet
- 2008 - A Low Cost Drive Strategy For BLDC Motor With Low Torque RipplesDocument4 pages2008 - A Low Cost Drive Strategy For BLDC Motor With Low Torque RipplesgrcatuNo ratings yet
- L T D I V F D: Atest Echnological Evelopments N Ariable Requency RivesDocument18 pagesL T D I V F D: Atest Echnological Evelopments N Ariable Requency RivesBijay AgrawalNo ratings yet
- Harmonics and Torque Ripple Reduction of Brushless DC Motor (BLDCM) Using Cascaded H-Bridge Multilevel InverterDocument4 pagesHarmonics and Torque Ripple Reduction of Brushless DC Motor (BLDCM) Using Cascaded H-Bridge Multilevel InverterNirmalaNeeruNo ratings yet
- ReportfinalDocument44 pagesReportfinalYuvraj GogoiNo ratings yet
- Bi-Directional DC-to-DC Converter For Solar Applications With Battery BackupDocument5 pagesBi-Directional DC-to-DC Converter For Solar Applications With Battery BackupPaulius BruneikaNo ratings yet
- Lecture No 5Document27 pagesLecture No 5Walid salamaNo ratings yet
- Microcontroller Based Constant Speed Low Cost Energy Efficient BLDC Motor Drive Using Proteus VSM SoftwareDocument7 pagesMicrocontroller Based Constant Speed Low Cost Energy Efficient BLDC Motor Drive Using Proteus VSM SoftwaremakroumNo ratings yet
- Single Phase Three Leg Ac/ac ConverterDocument8 pagesSingle Phase Three Leg Ac/ac ConvertermycatalystsNo ratings yet
- Three-Level Inverter Speed Control of Induction MotorDocument12 pagesThree-Level Inverter Speed Control of Induction MotorMallikarjunBhiradeNo ratings yet
- Power Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFDocument6 pagesPower Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFMehdi Raza KhorasaniNo ratings yet
- Ieee AbstractsDocument5 pagesIeee AbstractsNaga RjunNo ratings yet
- DCM Three-Phase Rectifier for Low Power WECS (39Document6 pagesDCM Three-Phase Rectifier for Low Power WECS (39Izabel VieiraNo ratings yet
- R KrishDocument8 pagesR Krishshyam_iitbNo ratings yet
- Pulse: Modulated InvertersDocument11 pagesPulse: Modulated InvertersBrahmananda Reddy TeegalaNo ratings yet
- PX5202 - SSDC Question BankDocument21 pagesPX5202 - SSDC Question BankRoja50% (2)
- Embedded BLCDDocument24 pagesEmbedded BLCDDhananjay PatilNo ratings yet
- Electric Drive Q-Bank AnswersDocument22 pagesElectric Drive Q-Bank AnswersGoud SannyNo ratings yet
- Chapter 1Document15 pagesChapter 1webhareggebru06No ratings yet
- BDocument46 pagesBemmanueel2No ratings yet
- CHAPTER threeDocument20 pagesCHAPTER threeAung MyatNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Advanced Multilevel Converters and Applications in Grid IntegrationFrom EverandAdvanced Multilevel Converters and Applications in Grid IntegrationAli Iftekhar MaswoodNo ratings yet
- Power VSIDocument2 pagesPower VSIsrikaanth06No ratings yet
- Part ADocument5 pagesPart Asrikaanth06No ratings yet
- Control Systems Lab ExperimentsDocument3 pagesControl Systems Lab Experimentssrikaanth06No ratings yet
- Single Ended Primary Inductance Converter (Sepic) : DVG VDocument3 pagesSingle Ended Primary Inductance Converter (Sepic) : DVG Vsrikaanth06No ratings yet
- Two Existing Inverter Topologies for HEVs and EVs ComparedDocument2 pagesTwo Existing Inverter Topologies for HEVs and EVs Comparedsrikaanth06No ratings yet
- Power Electronics and Advanced Electrical Drives Lab - 1Document1 pagePower Electronics and Advanced Electrical Drives Lab - 1srikaanth06No ratings yet
- Force in Magnetic FieldsDocument3 pagesForce in Magnetic Fieldssrikaanth06No ratings yet
- Reactive Power of Star and Delta Connected Balanced LoadsDocument3 pagesReactive Power of Star and Delta Connected Balanced Loadssrikaanth06No ratings yet
- Static V-I Characteristics of A ThyristorDocument3 pagesStatic V-I Characteristics of A Thyristorsrikaanth06No ratings yet
- Generator Load ModelDocument3 pagesGenerator Load Modelsrikaanth06No ratings yet
- Unit-I Assignment Sub:Power Electronics Class: Iiird B.Tech-I Sem Part-ADocument3 pagesUnit-I Assignment Sub:Power Electronics Class: Iiird B.Tech-I Sem Part-Asrikaanth06No ratings yet
- Mosfet Part2Document3 pagesMosfet Part2srikaanth06No ratings yet
- AC Voltage Controllers-1Document6 pagesAC Voltage Controllers-1srikaanth06No ratings yet
- Mosfet Part1Document4 pagesMosfet Part1srikaanth06No ratings yet
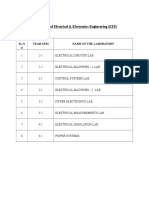
- EEE Department Lab ListingDocument1 pageEEE Department Lab Listingsrikaanth06No ratings yet
- Pe Unit2Document2 pagesPe Unit2srikaanth06No ratings yet
- LFB Radial Distribution Power Flow Model Section - 3Document7 pagesLFB Radial Distribution Power Flow Model Section - 3srikaanth06No ratings yet
- LFC Introduction Part 2Document1 pageLFC Introduction Part 2srikaanth06No ratings yet
- New Microsoft Office Word DocumentDocument2 pagesNew Microsoft Office Word Documentsrikaanth06No ratings yet
- LFB Radial Distribution Power Flow Model Section - 1Document2 pagesLFB Radial Distribution Power Flow Model Section - 1srikaanth06No ratings yet
- LFC AbstractDocument1 pageLFC Abstractsrikaanth06No ratings yet
- LFC Modelling Part 1Document1 pageLFC Modelling Part 1srikaanth06No ratings yet
- Off 1Document1 pageOff 1srikaanth06No ratings yet
- LFC Modelling Part 3Document1 pageLFC Modelling Part 3srikaanth06No ratings yet
- Fig.2.2 Turbine Speed Governing SystemDocument3 pagesFig.2.2 Turbine Speed Governing Systemsrikaanth06No ratings yet
- LFC Introduction Part 3Document2 pagesLFC Introduction Part 3srikaanth06No ratings yet
- PsocDocument1 pagePsocsrikaanth06No ratings yet
- LFC Introduction Part 1Document4 pagesLFC Introduction Part 1srikaanth06No ratings yet
- Data StratificationDocument19 pagesData StratificationVaibhav C GandhiNo ratings yet
- Advancedigital Communications: Instructor: Dr. M. Arif WahlaDocument34 pagesAdvancedigital Communications: Instructor: Dr. M. Arif Wahlafahad_shamshadNo ratings yet
- Topic 7 AnswersDocument13 pagesTopic 7 AnswersjulioNo ratings yet
- Construction of Global Phase Equilibrium Diagrams: Martín CismondiDocument51 pagesConstruction of Global Phase Equilibrium Diagrams: Martín CismondiAymen AnouneeNo ratings yet
- General Mathematics - Module #3Document7 pagesGeneral Mathematics - Module #3Archie Artemis NoblezaNo ratings yet
- DifferentialDocument402 pagesDifferentialMartínez Gutiérrez MoisésNo ratings yet
- Aqa Comp1 W MS Jun10Document29 pagesAqa Comp1 W MS Jun10Arsalan FotovatNo ratings yet
- Atomic Physics ExamDocument3 pagesAtomic Physics Examvasudevan m.vNo ratings yet
- FDocument24 pagesFrotenolabsNo ratings yet
- Analytic Geometry: The Conic SectionsDocument52 pagesAnalytic Geometry: The Conic SectionsMae MateoNo ratings yet
- Geological Model SimulationDocument10 pagesGeological Model SimulationYadirita Sanchez VillarrealNo ratings yet
- PythonDocument126 pagesPythonATUL SHARMANo ratings yet
- Format LecDocument71 pagesFormat LecACES JEEL CENDA�ANo ratings yet
- Report CVP AnalysisDocument25 pagesReport CVP AnalysisSaief Dip100% (1)
- EthnomathematicsDocument9 pagesEthnomathematicsapi-256195037No ratings yet
- Mining Surveying Lecture Notes-II: Assoc - Prof.Dr. Nursu TunalıoğluDocument26 pagesMining Surveying Lecture Notes-II: Assoc - Prof.Dr. Nursu TunalıoğluEnes AslanNo ratings yet
- Block Diagram ReductionDocument7 pagesBlock Diagram ReductionMahendra Sutar100% (1)
- Andrea Steaban Resume June 17Document4 pagesAndrea Steaban Resume June 17api-252743869No ratings yet
- CALCULOSDocument227 pagesCALCULOSLuisHuamanQuilicheNo ratings yet
- Poisson Distribution & ProblemsDocument2 pagesPoisson Distribution & ProblemsEunnicePanaliganNo ratings yet
- Coherent Transition Radiation From A Helically Microbunched Electron BeamDocument6 pagesCoherent Transition Radiation From A Helically Microbunched Electron BeamParticle Beam Physics LabNo ratings yet
- Introduction To ANNDocument14 pagesIntroduction To ANNShahzad Karim KhawerNo ratings yet
- The Potency of Using Math Educational Software in Teaching Business Mathematics CoursesDocument12 pagesThe Potency of Using Math Educational Software in Teaching Business Mathematics CoursesDUDE RYAN OBAMOSNo ratings yet
- MPM2D1Document2 pagesMPM2D1anotheroadsideNo ratings yet
- Applied Dynamics - MT 224Document6 pagesApplied Dynamics - MT 224Feker KebereNo ratings yet
- RD Sharma Dec2020 Solution For Class 11 Maths Chapter 30 PDFDocument34 pagesRD Sharma Dec2020 Solution For Class 11 Maths Chapter 30 PDFjalpaNo ratings yet