You might also like
- Unidad 1 Saber 1PROGRAMACION DE ROBOTSDocument17 pagesUnidad 1 Saber 1PROGRAMACION DE ROBOTSLUIS HUMBERTO DEL PRADO AGUIRRENo ratings yet
- Guia 6Document24 pagesGuia 6bookskskNo ratings yet
- Informe Expo - Programacion RobotsDocument23 pagesInforme Expo - Programacion Robotste veo te veoNo ratings yet
- Paper RV-M1Document5 pagesPaper RV-M1dickforusNo ratings yet
- Actividades #3B Programacion ElementalDocument4 pagesActividades #3B Programacion Elementalkevin.tristanchoNo ratings yet
- Programa Especialidad Robotica EDITMEDocument6 pagesPrograma Especialidad Robotica EDITMElargo1312No ratings yet
- Enunciado Trabajo Practico Robotica 2010-11Document2 pagesEnunciado Trabajo Practico Robotica 2010-11Roberto SanchezNo ratings yet
- AA3 - Programación de MicrocontroladoresDocument7 pagesAA3 - Programación de MicrocontroladoresOscar LozadaNo ratings yet
- TR2 PDFDocument14 pagesTR2 PDFJesus LlontopNo ratings yet
- Material LMTDocument138 pagesMaterial LMTyolver1990No ratings yet
- P02. Manipular Un Robot de Forma ManualDocument8 pagesP02. Manipular Un Robot de Forma ManualFernando González MarínNo ratings yet
- Fase4 Colaborativa Grupo 2Document17 pagesFase4 Colaborativa Grupo 2fredysNo ratings yet
- Plan de Estudios Robótica IDocument6 pagesPlan de Estudios Robótica ISulbaran RichardNo ratings yet
- Lab 2Document7 pagesLab 2Jesús ZuñigaNo ratings yet
- Inf6 MaldonadoJ CPR2Document8 pagesInf6 MaldonadoJ CPR2Kevin VillavicencioNo ratings yet
- Electiva III Informe 7Document4 pagesElectiva III Informe 7Gabriel HernándezNo ratings yet
- Robotica Proyecto FinalDocument12 pagesRobotica Proyecto FinalLuisdaniel BallesterosseguraNo ratings yet
- Práctica 2 ESIMEZDocument5 pagesPráctica 2 ESIMEZRaul ChavezNo ratings yet
- DISEÑO Y CONSTRUCCION DE UN ROBOT EXPLORADOR (Resumen)Document4 pagesDISEÑO Y CONSTRUCCION DE UN ROBOT EXPLORADOR (Resumen)joseiutNo ratings yet
- Informe Robotica MecatronicaDocument21 pagesInforme Robotica MecatronicaWilfredo OlazabalNo ratings yet
- Lab Nº12 - Herramientas de Software 2 - 2017 - ImparDocument7 pagesLab Nº12 - Herramientas de Software 2 - 2017 - ImparFabricio BenaventeNo ratings yet
- Monografia Construccion de Brazo RoboticoDocument10 pagesMonografia Construccion de Brazo RoboticoCarlos Quispealaya LazoNo ratings yet
- Labo. Final 2. RoboticaDocument9 pagesLabo. Final 2. RoboticaJheral Ramírez NavarroNo ratings yet
- R2E2Document16 pagesR2E2Eduardo ArriagaNo ratings yet
- Fase4 Grupo 299011 31Document15 pagesFase4 Grupo 299011 31sindy Bermúdez Caballero100% (1)
- Practica 2Document9 pagesPractica 2David UrestiNo ratings yet
- Cuadernillo TP2 - Robótica 2012 V5Document10 pagesCuadernillo TP2 - Robótica 2012 V5tommorelo2211No ratings yet
- RoboticaDocument5 pagesRoboticacOrekernNo ratings yet
- Actividad Semana 2Document9 pagesActividad Semana 2Rodrigo Sandoval DuránNo ratings yet
- Laboratorio 1Document9 pagesLaboratorio 1Andree CrNo ratings yet
- Actividad de Aprendizaje 4 Programa Ensamblador Grupo 7Document16 pagesActividad de Aprendizaje 4 Programa Ensamblador Grupo 7Felipe RoseroNo ratings yet
- Practica2 Arq de RobotsDocument2 pagesPractica2 Arq de Robotsangel.soriagnNo ratings yet
- FICA - CIME - Lab - 03 - Robótica - Robot Mitsubishi RV-2F PDFDocument3 pagesFICA - CIME - Lab - 03 - Robótica - Robot Mitsubishi RV-2F PDFGabriela ChiluisaNo ratings yet
- 3 Secundaria RobóticaDocument20 pages3 Secundaria RobóticaAdrián ramirezNo ratings yet
- P1 Introducción Al Software RobotStudio 2023ADocument3 pagesP1 Introducción Al Software RobotStudio 2023ARamón Andrés Zambrano BermelloNo ratings yet
- Utp Lenguaje de Programacion de Alto Nivel 1 Clase001Document172 pagesUtp Lenguaje de Programacion de Alto Nivel 1 Clase001daleps4No ratings yet
- Prep6 MaldonadoJ CPR2Document8 pagesPrep6 MaldonadoJ CPR2Kevin VillavicencioNo ratings yet
- TFM - Beatriz Matos AgudoDocument152 pagesTFM - Beatriz Matos Agudoelmacuarro5100% (1)
- Segundo Aporte Fase 4Document6 pagesSegundo Aporte Fase 4leoNo ratings yet
- Proyecto RobotDocument6 pagesProyecto RobotJose furxxioNo ratings yet
- Practica No. 2 - Microprocesadores IPN ESIME ZACATENCODocument9 pagesPractica No. 2 - Microprocesadores IPN ESIME ZACATENCOYair MeraNo ratings yet
- Br-POS-4718 PROGRAMA EXPERTO EN SISTEMA OPERATIVO ROBÓTICO (ROS)Document3 pagesBr-POS-4718 PROGRAMA EXPERTO EN SISTEMA OPERATIVO ROBÓTICO (ROS)cesar optimusNo ratings yet
- LabVIEW: Entorno gráfico de programaciónFrom EverandLabVIEW: Entorno gráfico de programaciónRating: 4 out of 5 stars4/5 (4)
- Tarea#1 - Parcial#2 - Robotica - Grupo 2Document3 pagesTarea#1 - Parcial#2 - Robotica - Grupo 2Edwin TrochezNo ratings yet
- Amagua Marcos Informe3Document8 pagesAmagua Marcos Informe3MarcOs AlexanderNo ratings yet
- Programacion de Robot de Coordenadas CartesianasDocument9 pagesProgramacion de Robot de Coordenadas CartesianasIvan LopezNo ratings yet
- ROBOTICA2Document29 pagesROBOTICA2Rodrigo Espinoza CorsNo ratings yet
- Etapa 1 - Robótica - 2022Document7 pagesEtapa 1 - Robótica - 2022Melanie ReynagaNo ratings yet
- Colaborativo 3 Luis UrresteDocument14 pagesColaborativo 3 Luis Urresteluis eduardoNo ratings yet
- TALLER 5 Usando Lenguaje MelfaBasicDocument10 pagesTALLER 5 Usando Lenguaje MelfaBasicWilmer MeloNo ratings yet
- Emit Emit-522 Formatoalumnotrabajofinal 25Document11 pagesEmit Emit-522 Formatoalumnotrabajofinal 25Dariel Sebastian CbNo ratings yet
- Enfoque ADDIE - iNTRODUCCIÓN A LA ROBÓTICA POR ILEANA C. CABALLERODocument19 pagesEnfoque ADDIE - iNTRODUCCIÓN A LA ROBÓTICA POR ILEANA C. CABALLEROMaestriaOteimaNo ratings yet
- Robots FANUCDocument51 pagesRobots FANUCRonaldo Marcos SoteloNo ratings yet
- Silabos de RoboticaDocument6 pagesSilabos de RoboticaJuan Carlos Gonzales ArosteNo ratings yet
- Informe Proyecto Solorzano Robot MovilDocument6 pagesInforme Proyecto Solorzano Robot MovilMARIO JOSUE SANCHEZ MURILLONo ratings yet
- Manual Pata El Robot MitsubishiDocument43 pagesManual Pata El Robot Mitsubishidulcemar520No ratings yet
- TAREA Fase 4Document17 pagesTAREA Fase 4Jhon SuarezNo ratings yet
- Paso 3 - Programar Por Medio de Software Los Movimientos de Un Robot - Entrega de La ActividadDocument11 pagesPaso 3 - Programar Por Medio de Software Los Movimientos de Un Robot - Entrega de La ActividadJoan GarciaNo ratings yet
- Programación gráfica para ingenierosFrom EverandProgramación gráfica para ingenierosRating: 4.5 out of 5 stars4.5/5 (3)
- Laboratorio 2Document5 pagesLaboratorio 2Javier Ferney Castillo GarciaNo ratings yet
- Herramienta Software de Gestión y Evaluación de Terapias de Rehabilitación-IBERDISCAPDocument8 pagesHerramienta Software de Gestión y Evaluación de Terapias de Rehabilitación-IBERDISCAPJavier Ferney Castillo GarciaNo ratings yet
- Laboratorio 3Document5 pagesLaboratorio 3Javier Ferney Castillo GarciaNo ratings yet
- Laboratorio 1Document5 pagesLaboratorio 1Javier Ferney Castillo GarciaNo ratings yet
- Robotica 3Document50 pagesRobotica 3Javier Ferney Castillo GarciaNo ratings yet
- Laboratorio 1Document4 pagesLaboratorio 1Javier Ferney Castillo GarciaNo ratings yet
- Semana 2Document27 pagesSemana 2Javier Ferney Castillo GarciaNo ratings yet
- LABO10 ADocument5 pagesLABO10 AJavier Ferney Castillo GarciaNo ratings yet
- LABO1Document3 pagesLABO1Javier Ferney Castillo GarciaNo ratings yet
- LABO1Document12 pagesLABO1Javier Ferney Castillo GarciaNo ratings yet
- LABO2Document5 pagesLABO2Javier Ferney Castillo GarciaNo ratings yet
- Metodología para La Implantación de Una Red Tipo MLP v4Document7 pagesMetodología para La Implantación de Una Red Tipo MLP v4Javier Ferney Castillo GarciaNo ratings yet
- Jornadasaitadis2014 Submission 22Document4 pagesJornadasaitadis2014 Submission 22Javier Ferney Castillo GarciaNo ratings yet
- NEUROREALIMENTACIONDocument13 pagesNEUROREALIMENTACIONJavier Ferney Castillo GarciaNo ratings yet
- Adaptive Brain Computer InterfacesDocument134 pagesAdaptive Brain Computer InterfacesJavier Ferney Castillo GarciaNo ratings yet
- Potenciales Cerebrales Ligados A Eventos: Clasification Y Uso ClinicoDocument10 pagesPotenciales Cerebrales Ligados A Eventos: Clasification Y Uso ClinicoJavier Ferney Castillo GarciaNo ratings yet
- Introduccion BciDocument55 pagesIntroduccion BciJavier Ferney Castillo GarciaNo ratings yet
- Sky DronesDocument2 pagesSky DronesJavier Ferney Castillo GarciaNo ratings yet
- Metodologia para La Implementación de Sistemas de Inferencia Difuso Tipo Sugeno en Sistemas EmbebidosDocument12 pagesMetodologia para La Implementación de Sistemas de Inferencia Difuso Tipo Sugeno en Sistemas EmbebidosJavier Ferney Castillo Garcia0% (1)
- CENAPRED Sismos Recomendaciones Folleto PDFDocument36 pagesCENAPRED Sismos Recomendaciones Folleto PDFMalusitaNo ratings yet
- ExpedienteDocument474 pagesExpedientearkawaNo ratings yet
- Estudio Impacto Ambiental Construcción de Galpón IndustrialDocument126 pagesEstudio Impacto Ambiental Construcción de Galpón IndustrialAnonymous QRtgiAom8No ratings yet
- Unidad 2: Herramientas para La Solución de Problemas de GestiónDocument84 pagesUnidad 2: Herramientas para La Solución de Problemas de GestiónMoises Rubio Silva100% (2)
- Suelos EspecialesDocument59 pagesSuelos EspecialesZohar D. ML100% (1)
- Formato Ficha Tecnica Equipos y HV EquiposDocument4 pagesFormato Ficha Tecnica Equipos y HV EquiposMaira Lucia AlvarezNo ratings yet
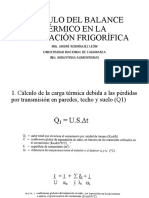
- Calculo Del Balance Térmico en La Instalación FrigoríficaDocument135 pagesCalculo Del Balance Térmico en La Instalación FrigoríficaJesus Acevedo NievesNo ratings yet
- Calculo de RevoqueDocument7 pagesCalculo de Revoquejohn barbosaNo ratings yet
- Naca 4115Document38 pagesNaca 4115Juan López LópezNo ratings yet
- Clasificacion de LamparasDocument7 pagesClasificacion de LamparasAldo MelchorNo ratings yet
- Lista Precios Septiembre 2017Document61 pagesLista Precios Septiembre 2017Alex FlorezNo ratings yet
- Ficha Tecnica Central Hidraulica TDDL 10 03 24Document5 pagesFicha Tecnica Central Hidraulica TDDL 10 03 24Juan LlaguelNo ratings yet
- Ejercicio Basico de Circuitos IntegradosDocument5 pagesEjercicio Basico de Circuitos IntegradosDanielNo ratings yet
- BT RRB7Document528 pagesBT RRB7Eldelson BaggetoNo ratings yet
- Experiencia N°6 - Amplificadores Operacionales (Previo)Document10 pagesExperiencia N°6 - Amplificadores Operacionales (Previo)Karen Peña ReyesNo ratings yet
- Lenguaje de ProgramaciónDocument5 pagesLenguaje de ProgramaciónYordan Sullca PalominoNo ratings yet
- Manual Practico de Seguridad y Salud en La ConstrucciónDocument366 pagesManual Practico de Seguridad y Salud en La ConstrucciónpelionekenobiNo ratings yet
- Ciencia de Los MaterialesDocument2 pagesCiencia de Los MaterialesJorman GrisalesNo ratings yet
- Ingenieria Del ProyectoDocument15 pagesIngenieria Del ProyectoDiego Jeff Morales RojasNo ratings yet
- Examen T2 - Grupo 1Document25 pagesExamen T2 - Grupo 1santos rodriguez anticonaNo ratings yet
- Blanco - Estudio Comparativo Entre La Obtención de Piezas Mediante Impresoras 3D y Su Obtención M...Document238 pagesBlanco - Estudio Comparativo Entre La Obtención de Piezas Mediante Impresoras 3D y Su Obtención M...Javier Fuentes NavarroNo ratings yet
- Clasificación de Equipo Pesado MóvilDocument36 pagesClasificación de Equipo Pesado MóvilCarlos Alfredo Laura100% (2)
- Informe de Mecanica de SuelosDocument13 pagesInforme de Mecanica de SuelosJUAN JOSE VASQUEZ CASTILLONo ratings yet
- Clase 16 Aplicacion de Laplace en Circuitos EléctricosDocument7 pagesClase 16 Aplicacion de Laplace en Circuitos Eléctricosedwin camargoNo ratings yet
- Proyecto de Semana 2 Curso 1Document6 pagesProyecto de Semana 2 Curso 1fsp443140No ratings yet
- Capitulo 4Document86 pagesCapitulo 4AngelPGNo ratings yet
- Guia Ico PS2Document8 pagesGuia Ico PS2luisortegarama_1No ratings yet
- Nodo de Conocimiento en Saneamiento Sostenible Descentralizado - NSSDDocument26 pagesNodo de Conocimiento en Saneamiento Sostenible Descentralizado - NSSDProcosiNo ratings yet
- Instrucciones Servicio Sinamics V20 2017 PDFDocument426 pagesInstrucciones Servicio Sinamics V20 2017 PDFFabian RobuschiNo ratings yet