You might also like
- Method and Apparatus For Remotely Programming A Cellular RadiotelephoneDocument16 pagesMethod and Apparatus For Remotely Programming A Cellular RadiotelephoneIkram MardhaniNo ratings yet
- Ulllted States Patent (19) (11) Patent Number: 5,948,043: Mathis (45) Date of Patent: Sep. 7, 1999Document16 pagesUlllted States Patent (19) (11) Patent Number: 5,948,043: Mathis (45) Date of Patent: Sep. 7, 1999Abeng YogtaNo ratings yet
- Device For Monitoring A Magnetic Field Emanating From An OrganismDocument14 pagesDevice For Monitoring A Magnetic Field Emanating From An OrganismDAVIDNo ratings yet
- US6185288Document36 pagesUS6185288arungarg_itNo ratings yet
- United States Patent (19) : Harman Et A1Document13 pagesUnited States Patent (19) : Harman Et A1adnantahir012873No ratings yet
- (12 Ulllted States Patent (10) Patent N0.: US 6,236,330 B1Document8 pages(12 Ulllted States Patent (10) Patent N0.: US 6,236,330 B1sonyaNo ratings yet
- Ulllted States Patent (19) (11) Patent Number: 6,065,404: Ripingill, Jr. Et Al. (45) Date 0f Patent: May 23, 2000Document13 pagesUlllted States Patent (19) (11) Patent Number: 6,065,404: Ripingill, Jr. Et Al. (45) Date 0f Patent: May 23, 2000willNo ratings yet
- United States Patent: (10) Patent No.: (45) Date of PatentDocument12 pagesUnited States Patent: (10) Patent No.: (45) Date of PatentKhaidir WijayaNo ratings yet
- United States Patent: (12) (10) Patent No.: US 7,349,557 B2Document18 pagesUnited States Patent: (12) (10) Patent No.: US 7,349,557 B2Alex MungaiNo ratings yet
- 2005 - US006968735B2 - Long Range Data Transmitter For HDDDocument9 pages2005 - US006968735B2 - Long Range Data Transmitter For HDDCường Nguyễn QuốcNo ratings yet
- US5440336Document19 pagesUS5440336arungarg_itNo ratings yet
- Us6603837 PDFDocument20 pagesUs6603837 PDFMorena G. Lopez VargasNo ratings yet
- Ulllted States Patent 19 11 Patent Number: 5 839 108: Daberko Et Al. (45) Date of Patent: Nov. 17, 1998Document12 pagesUlllted States Patent 19 11 Patent Number: 5 839 108: Daberko Et Al. (45) Date of Patent: Nov. 17, 1998pmurphNo ratings yet
- United States Patent (191: Cgorrecgngl For Rréislocaticgil of Realhworld Coolrldinaft'esDocument10 pagesUnited States Patent (191: Cgorrecgngl For Rréislocaticgil of Realhworld Coolrldinaft'esFelipe JMNo ratings yet
- United States Patent (10) Patent No.: US 6,600,418 B2: Francis Et Al. (45) Date of Patent: Jul. 29, 2003Document22 pagesUnited States Patent (10) Patent No.: US 6,600,418 B2: Francis Et Al. (45) Date of Patent: Jul. 29, 2003Syed IzzatNo ratings yet
- D5 US7916951B2 AnnotatedDocument80 pagesD5 US7916951B2 AnnotatedTanmay SethiNo ratings yet
- United States Patent (19) 11 Patent Number: 6,084,979: Kanade Et Al. (45) Date of Patent: Jul. 4, 2000Document27 pagesUnited States Patent (19) 11 Patent Number: 6,084,979: Kanade Et Al. (45) Date of Patent: Jul. 4, 2000Adya RizkyNo ratings yet
- Us 5218367Document14 pagesUs 5218367Onyinyeeh ChidolueNo ratings yet
- US4858141Document13 pagesUS4858141Fernando Marcos WittmannNo ratings yet
- Fig: ' Other Publications: Unlted States Patent (19) (11) Patent Number: 5,219,264Document11 pagesFig: ' Other Publications: Unlted States Patent (19) (11) Patent Number: 5,219,264Angel LagrañaNo ratings yet
- United States Patent (19) 11 Patent Number: 6,042,012: Bruce E. Paris Jorge L. Acosta 65 G WDocument99 pagesUnited States Patent (19) 11 Patent Number: 6,042,012: Bruce E. Paris Jorge L. Acosta 65 G WAyomide RichardNo ratings yet
- US6319010B1Document10 pagesUS6319010B1José Meza CastellanosNo ratings yet
- A7 PDFDocument11 pagesA7 PDFRouda AldosariNo ratings yet
- United States Patent (10) Patent No.: US 8,068,610 B2Document12 pagesUnited States Patent (10) Patent No.: US 8,068,610 B2emanuelvalenteNo ratings yet
- Patent For Transmitting Bio-DataDocument9 pagesPatent For Transmitting Bio-DataoscarnineNo ratings yet
- United States Patent (19) : Patent Number: Date of PatentDocument36 pagesUnited States Patent (19) : Patent Number: Date of PatentGretel HanselNo ratings yet
- United States Patent (10) Patent N0.: US 6,544,098 B1Document60 pagesUnited States Patent (10) Patent N0.: US 6,544,098 B1matiascafuNo ratings yet
- United States Patent (19) : 11 Patent Number: 6,127,931 (45) Date of Patent: Oct. 3, 2000Document12 pagesUnited States Patent (19) : 11 Patent Number: 6,127,931 (45) Date of Patent: Oct. 3, 2000Melin Yohana SitioNo ratings yet
- Transfer TranscutanatDocument10 pagesTransfer TranscutanatCatalin PasolNo ratings yet
- United States Patent (10) Patent No.: US 7,948,986 B1Document27 pagesUnited States Patent (10) Patent No.: US 7,948,986 B1Sávio MirandaNo ratings yet
- United States Patent (10) Patent No.: Us 7.620,327 B2: Snawerdt (45) Date of Patent: Nov. 17, 2009Document11 pagesUnited States Patent (10) Patent No.: Us 7.620,327 B2: Snawerdt (45) Date of Patent: Nov. 17, 2009jsholleyNo ratings yet
- US5952599-Dolby Patent-1999Document16 pagesUS5952599-Dolby Patent-1999Duane BlakeNo ratings yet
- Us5963919 PDFDocument22 pagesUs5963919 PDFSachie BeeNo ratings yet
- Voice Over DataDocument264 pagesVoice Over Dataquratulain bhattiNo ratings yet
- BITE SystemDocument20 pagesBITE Systemmutha milanNo ratings yet
- United States Patent (10) Patent No.: US 9,038,177 B1Document13 pagesUnited States Patent (10) Patent No.: US 9,038,177 B1Dhruti PithavaNo ratings yet
- United States Patent: (12) (10) Patent N0.: US 6,256,489 B1Document8 pagesUnited States Patent: (12) (10) Patent N0.: US 6,256,489 B1Gek CagatanNo ratings yet
- Zip2 Elon Musk US6148260ADocument11 pagesZip2 Elon Musk US6148260AJuhan WillNo ratings yet
- Us 6974123Document9 pagesUs 6974123John MccloskeyNo ratings yet
- United States Patent (10) Patent No.: US 7,509,349 B2: Celik (45) Date of Patent: Mar. 24, 2009Document30 pagesUnited States Patent (10) Patent No.: US 7,509,349 B2: Celik (45) Date of Patent: Mar. 24, 2009Bambang SatrioNo ratings yet
- 2006 - Us7013991 - Obstacle Detection System For Underground OperationsDocument30 pages2006 - Us7013991 - Obstacle Detection System For Underground OperationsCường Nguyễn QuốcNo ratings yet
- {专利}Skyline专利2002一种向透视图提供描述三维地形的数据块的方法US6496189Document20 pages{专利}Skyline专利2002一种向透视图提供描述三维地形的数据块的方法US6496189Charles O'ConnorNo ratings yet
- US6169135Document13 pagesUS6169135NidaNo ratings yet
- United States Patent (19) : (45) Date of Patent: Dec. 1, 1998Document12 pagesUnited States Patent (19) : (45) Date of Patent: Dec. 1, 1998Sebastian Carlo CabiadesNo ratings yet
- Sal-/? 4 st-12-ss: (12) United States Patent (10) Patent No.: US 6, 191587 B1Document14 pagesSal-/? 4 st-12-ss: (12) United States Patent (10) Patent No.: US 6, 191587 B1雷鸣No ratings yet
- United States Patent: Osajda Et AlDocument9 pagesUnited States Patent: Osajda Et Almcx_123No ratings yet
- US5121329Document15 pagesUS5121329AndersonNo ratings yet
- US6087796 Vel+fluxDocument16 pagesUS6087796 Vel+fluxsebastianNo ratings yet
- Us 7210627Document29 pagesUs 7210627Priyank JivaniNo ratings yet
- US7825853Document24 pagesUS7825853leo trimbleNo ratings yet
- US5591213Document14 pagesUS5591213Muhammad LutfiNo ratings yet
- United States Patent: Smyth Et Al. (45) Date of Patent: Feb. 24, 2004Document7 pagesUnited States Patent: Smyth Et Al. (45) Date of Patent: Feb. 24, 2004Bảo BìnhNo ratings yet
- United States Patent (10) Patent No.: US 6,324,393 B1: Doshay (45) Date of Patent: Nov. 27, 2001Document5 pagesUnited States Patent (10) Patent No.: US 6,324,393 B1: Doshay (45) Date of Patent: Nov. 27, 2001Kalai KalaiNo ratings yet
- US Patent On WOFDMDocument35 pagesUS Patent On WOFDMHatim ZaghloulNo ratings yet
- United States Patent: K K I I 4 (6Document13 pagesUnited States Patent: K K I I 4 (6BukNo ratings yet
- United States Patent: 104 To - " ToDocument15 pagesUnited States Patent: 104 To - " ToJason JerseyNo ratings yet
- United States Patent (191: Epperson, JRDocument6 pagesUnited States Patent (191: Epperson, JRAparnaNo ratings yet
- United States Patent (10) Patent No.: Us 6,587,534 B2: Hassoun Et Al. (45) Date of Patent: Jul. 1, 2003Document20 pagesUnited States Patent (10) Patent No.: Us 6,587,534 B2: Hassoun Et Al. (45) Date of Patent: Jul. 1, 2003David HoffmanNo ratings yet
- Us PatentDocument28 pagesUs PatentPiyush YadavNo ratings yet
- Mount Tam Trail Run MapDocument1 pageMount Tam Trail Run MapBukNo ratings yet
- 2018 Used BMW X1 XDrive28i Sports Activity Vehicle at Motorwerks BMW Serving Bloomington, MN, IID 17353408Document7 pages2018 Used BMW X1 XDrive28i Sports Activity Vehicle at Motorwerks BMW Serving Bloomington, MN, IID 17353408BukNo ratings yet
- United States: (12) Patent Application Publication (10) Pub - No .: US 2017 / 0246207 A1Document17 pagesUnited States: (12) Patent Application Publication (10) Pub - No .: US 2017 / 0246207 A1BukNo ratings yet
- United States Patent (10) Patent N6 US 8,206,244 B2: Honea Et A) - (45) Date of Patent: Jun. 26, 2012Document34 pagesUnited States Patent (10) Patent N6 US 8,206,244 B2: Honea Et A) - (45) Date of Patent: Jun. 26, 2012BukNo ratings yet
- Trs-80 Lichello ProgramDocument3 pagesTrs-80 Lichello ProgramBukNo ratings yet
- iDTech Brochure2018Document27 pagesiDTech Brochure2018BukNo ratings yet
- Alt As NytimesDocument2 pagesAlt As NytimesBukNo ratings yet
- United States Patent: K K I I 4 (6Document13 pagesUnited States Patent: K K I I 4 (6BukNo ratings yet
- United States: (12) Patent Application Publication (10) Pub. No.: US 2012/0184286 A1Document21 pagesUnited States: (12) Patent Application Publication (10) Pub. No.: US 2012/0184286 A1BukNo ratings yet
- R H 1 (J5 12b: (19) United StatesDocument33 pagesR H 1 (J5 12b: (19) United StatesBukNo ratings yet
- US6806791Document11 pagesUS6806791BukNo ratings yet
- United States: (12) Patent Application Publication (10) Pub. No.: US 2012/0148231 A1Document50 pagesUnited States: (12) Patent Application Publication (10) Pub. No.: US 2012/0148231 A1BukNo ratings yet
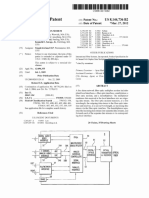
- Multiplexer/ 60 / S: (12) United States Patent (10) Patent N0.2 US 8,144,736 B2Document51 pagesMultiplexer/ 60 / S: (12) United States Patent (10) Patent N0.2 US 8,144,736 B2BukNo ratings yet
- United States Patent (191: Radcliffe (11) Patent Number: (45) Date of PatentDocument10 pagesUnited States Patent (191: Radcliffe (11) Patent Number: (45) Date of PatentBukNo ratings yet
- Y 503 / MJ/ /. Mobile: (19) United StatesDocument16 pagesY 503 / MJ/ /. Mobile: (19) United StatesBukNo ratings yet
- United States Patent: AnneetalDocument25 pagesUnited States Patent: AnneetalBukNo ratings yet
- United States Patent (19) : HaapakoskiDocument14 pagesUnited States Patent (19) : HaapakoskiBukNo ratings yet
- United States: (12) Patent Application Publication (10) Pub. No.: US 2004/0132474 A1Document17 pagesUnited States: (12) Patent Application Publication (10) Pub. No.: US 2004/0132474 A1BukNo ratings yet
- Compact Full Ku-Band Triplexer With Improved E-Plane Power DividerDocument13 pagesCompact Full Ku-Band Triplexer With Improved E-Plane Power DividerBukNo ratings yet
- Llllllllllllllllilllllllllllllilllllilll - L - IllllllllllllllllllliiDocument10 pagesLlllllllllllllllilllllllllllllilllllilll - L - IllllllllllllllllllliiBukNo ratings yet
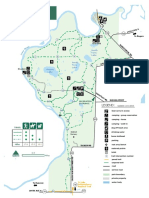
- Crow Hassan SummerDocument1 pageCrow Hassan SummerBukNo ratings yet
- Welding: Instruction Manual & Owners GuideDocument36 pagesWelding: Instruction Manual & Owners Guidekdm004xx75% (8)
- DP LAN Others 13115 DriversDocument2,284 pagesDP LAN Others 13115 DriversSyed AliNo ratings yet
- Phy Ip For Pcie 3.0Document2 pagesPhy Ip For Pcie 3.0uparashar1No ratings yet
- Emc-Wiring BTS7960Document1 pageEmc-Wiring BTS7960Arja'un TeaNo ratings yet
- Silo Weight & Volume CalculationDocument18 pagesSilo Weight & Volume CalculationYogesh PatilNo ratings yet
- Manual SeguridadDocument47 pagesManual SeguridadJavier González OrduñaNo ratings yet
- DPP - (5) 11th (P) IOC (E) - Ans PDFDocument2 pagesDPP - (5) 11th (P) IOC (E) - Ans PDFRishabh GuptaNo ratings yet
- FSP180 60savDocument1 pageFSP180 60savlth126No ratings yet
- Claud D.: CationDocument3 pagesClaud D.: CationSathvik S PrabhuNo ratings yet
- Oversizing of Solaredge Inverters, Technical NoteDocument1 pageOversizing of Solaredge Inverters, Technical NoteMohammad HamamdNo ratings yet
- Mit Lab 01Document6 pagesMit Lab 01api-247714257No ratings yet
- Ordering Guide & Technical Information: Absolute Process Control Know Where You Are... RegardlessDocument56 pagesOrdering Guide & Technical Information: Absolute Process Control Know Where You Are... RegardlessEduard RamosNo ratings yet
- Level3 - Application Note Earth Leakage RelayDocument4 pagesLevel3 - Application Note Earth Leakage RelayChhinPidenNo ratings yet
- V32Document2 pagesV32Antonios A NikolaouNo ratings yet
- Microzed V33a PDFDocument41 pagesMicrozed V33a PDFJouny WaelNo ratings yet
- H-Bridge PPDocument16 pagesH-Bridge PPMohammed HediaNo ratings yet
- Improvement of The Power Quality With Series Active Filter According To The IEC 61000-2006Document5 pagesImprovement of The Power Quality With Series Active Filter According To The IEC 61000-2006DanielAlejandroRamosQueroNo ratings yet
- Design and Construct A 3 KVA Micro Controller Based Pure Sine Wave Inverter With Controlled OutputDocument70 pagesDesign and Construct A 3 KVA Micro Controller Based Pure Sine Wave Inverter With Controlled OutputMcCurtis Akpojaro100% (1)
- Chapter 7Document69 pagesChapter 7Amit DostNo ratings yet
- DSX s300btx User ManualDocument2 pagesDSX s300btx User ManualAngelLazarte100% (1)
- Closing The Gap Between Asic Custom Tools and TechniquesDocument431 pagesClosing The Gap Between Asic Custom Tools and TechniquesAnonymous ZaO7fL4t100% (3)
- Encounter Test Lab VLSI ASICDocument10 pagesEncounter Test Lab VLSI ASICShama LolyNo ratings yet
- Bengkel Teknik Menjawab SPM 2016 PDFDocument59 pagesBengkel Teknik Menjawab SPM 2016 PDFSuriyati Yusoff75% (4)
- Mathcad - UCC3817 Design Procedure 7 29 08Document10 pagesMathcad - UCC3817 Design Procedure 7 29 08servetNo ratings yet
- LaMotte 5-0034 PH Meter pH5 Plus Handheld ManualDocument20 pagesLaMotte 5-0034 PH Meter pH5 Plus Handheld ManualPromagEnviro.comNo ratings yet
- Pengenalan Kepada AutocadDocument28 pagesPengenalan Kepada AutocadHanapi Ahamd AwatNo ratings yet
- Design Software 1Document2 pagesDesign Software 1anbarasuval84No ratings yet
- Manual KVR 225Document52 pagesManual KVR 225Chantres RadioNetNo ratings yet
- 05 NanomaterialsDocument28 pages05 NanomaterialsVacker GuzelNo ratings yet
- Android WidgetsDocument58 pagesAndroid WidgetsParas Pareek0% (1)