You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- OFDMDocument22 pagesOFDMbinduscribdNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Course Outline or Lesson PlanDocument5 pagesCourse Outline or Lesson PlanbinduscribdNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Unit 1 ProblemsDocument6 pagesUnit 1 ProblemsbinduscribdNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Internet of ThingsDocument7 pagesInternet of ThingsbinduscribdNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Basic Concepts of Digital FilteringDocument3 pagesBasic Concepts of Digital FilteringbinduscribdNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Ch-3Satellite Communications IIDocument36 pagesCh-3Satellite Communications IIbinduscribdNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- 1 PrivateGSMNetwork Enterprise TELCOsDocument15 pages1 PrivateGSMNetwork Enterprise TELCOsbinduscribdNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- PDC Chapter 3 ProblemsDocument16 pagesPDC Chapter 3 Problemsbinduscribd100% (2)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- E - WasteDocument8 pagesE - WastebinduscribdNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Audio Watermark: Jiamian YangDocument9 pagesAudio Watermark: Jiamian YangyuvrajparkaleNo ratings yet
- LLR Test General Driving Principles EnglishDocument23 pagesLLR Test General Driving Principles Englishu2mailrahulNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Docslide - Us Matlab-CodeDocument4 pagesDocslide - Us Matlab-CodebinduscribdNo ratings yet
- Hetero Junction Bipolar TransistorDocument4 pagesHetero Junction Bipolar TransistorbinduscribdNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Applications of PDCDocument5 pagesApplications of PDCbinduscribdNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Basic Concepts of Digital FilteringDocument3 pagesBasic Concepts of Digital FilteringbinduscribdNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Classical Encryption Techniques: CSE 651: Introduction To Network SecurityDocument54 pagesClassical Encryption Techniques: CSE 651: Introduction To Network SecurityManish KumarNo ratings yet
- Superheterodyne Radio Receivers: AM Receiver ArchitecturesDocument5 pagesSuperheterodyne Radio Receivers: AM Receiver ArchitecturesmythulasiNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Cse3461 C SignalEncoding 09-04-2012 PDFDocument14 pagesCse3461 C SignalEncoding 09-04-2012 PDFbinduscribdNo ratings yet
- ECA Course FileDocument154 pagesECA Course FilebinduscribdNo ratings yet
- Chapter 7 Multiple Access TechniquesDocument65 pagesChapter 7 Multiple Access TechniquesRamyAgiebNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 21 7 2015 Sphoorthy TimesDocument4 pages21 7 2015 Sphoorthy TimesbinduscribdNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Basic Concepts of Digital FilteringDocument3 pagesBasic Concepts of Digital FilteringbinduscribdNo ratings yet
- Internet of ThingsDocument7 pagesInternet of ThingsbinduscribdNo ratings yet
- CHAPTER 01 - Basics of Coding TheoryDocument36 pagesCHAPTER 01 - Basics of Coding TheorybinduscribdNo ratings yet
- DSP Lab Internal - Ii PaperDocument1 pageDSP Lab Internal - Ii PaperbinduscribdNo ratings yet
- STLD BitsDocument6 pagesSTLD BitsbinduscribdNo ratings yet
- Multistage AmplifierDocument22 pagesMultistage AmplifierVijay AnandhNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- ARM7 V CDocument106 pagesARM7 V CMaansi BhasinNo ratings yet
- CHAPTER 01 - Basics of Coding TheoryDocument36 pagesCHAPTER 01 - Basics of Coding TheorybinduscribdNo ratings yet
- Class 1Document43 pagesClass 1Santhi SriNo ratings yet
- 3-Waves of RoboticsDocument2 pages3-Waves of RoboticsEbrahim Abd El HadyNo ratings yet
- 8 Lesson 13 Viking FranceDocument2 pages8 Lesson 13 Viking Franceapi-332379661No ratings yet
- 09-11-2016 University Exam PaperDocument34 pages09-11-2016 University Exam PaperSirisha AsadiNo ratings yet
- Concrete Lab ManualDocument20 pagesConcrete Lab ManualkelmazodroNo ratings yet
- STFC-2023 International E - conference-BITDocument6 pagesSTFC-2023 International E - conference-BITRanilprabhu MNo ratings yet
- Zilog Z80-SIO Technical Manual TextDocument58 pagesZilog Z80-SIO Technical Manual Textprada.rizzoplcNo ratings yet
- 3.15.E.V25 Pneumatic Control Valves DN125-150-EnDocument3 pages3.15.E.V25 Pneumatic Control Valves DN125-150-EnlesonspkNo ratings yet
- Report Painter GR55Document17 pagesReport Painter GR55Islam EldeebNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
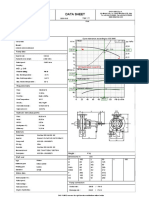
- Data Sheet: Item N°: Curve Tolerance According To ISO 9906Document3 pagesData Sheet: Item N°: Curve Tolerance According To ISO 9906Aan AndianaNo ratings yet
- Email ID: Contact No: +971562398104, +917358302902: Name: R.VishnushankarDocument6 pagesEmail ID: Contact No: +971562398104, +917358302902: Name: R.VishnushankarJêmš NavikNo ratings yet
- Aspen Plus User ModelsDocument339 pagesAspen Plus User Modelskiny81100% (1)
- GoodElearning TOGAF Poster 46 - Adapting The ADMDocument1 pageGoodElearning TOGAF Poster 46 - Adapting The ADMFabian HidalgoNo ratings yet
- DLPFBSDocument1 pageDLPFBSEdnaMarquezMoralesNo ratings yet
- Riveted JointsDocument28 pagesRiveted Jointsgnbabuiitg0% (1)
- PhotometryDocument2 pagesPhotometryHugo WNo ratings yet
- Design of AC Chopper Voltage Regulator Based On PIC16F716 MicrocontrollerDocument4 pagesDesign of AC Chopper Voltage Regulator Based On PIC16F716 MicrocontrollerabfstbmsodNo ratings yet
- Electronics 12 00811Document11 pagesElectronics 12 00811Amber MishraNo ratings yet
- Three Revolutionary Architects - Boullee, Ledoux, and Lequeu PDFDocument135 pagesThree Revolutionary Architects - Boullee, Ledoux, and Lequeu PDFTran LeNo ratings yet
- Mis Report On Ola CabsDocument18 pagesMis Report On Ola CabsDaksh MaruNo ratings yet
- Pre Intermediate Talking ShopDocument4 pagesPre Intermediate Talking ShopSindy LiNo ratings yet
- Postmodernism in Aha! MovieDocument2 pagesPostmodernism in Aha! MovieSayma AkterNo ratings yet
- Rules and Fallacies For Categorical SyllogismsDocument5 pagesRules and Fallacies For Categorical SyllogismsFatima Ismael PortacioNo ratings yet
- Feasibility and Optimization of Dissimilar Laser Welding ComponentsDocument366 pagesFeasibility and Optimization of Dissimilar Laser Welding Componentskaliappan45490No ratings yet
- Case Paul Foster Highlights of TarotDocument76 pagesCase Paul Foster Highlights of TarotTraditionaltarot100% (6)
- Module 2 DIPDocument33 pagesModule 2 DIPdigital loveNo ratings yet
- EF3e Intplus Filetest 10aDocument4 pagesEF3e Intplus Filetest 10aLin Shufen100% (1)
- All Papers of Thermodyanmics and Heat TransferDocument19 pagesAll Papers of Thermodyanmics and Heat TransfervismayluhadiyaNo ratings yet
- Chen 2021Document13 pagesChen 2021Aitor UzkudunNo ratings yet
- Libro INGLÉS BÁSICO IDocument85 pagesLibro INGLÉS BÁSICO IRandalHoyos100% (1)
- Tutorial: MSBA7003 Quantitative Analysis MethodsDocument29 pagesTutorial: MSBA7003 Quantitative Analysis MethodsAmanda WangNo ratings yet