You might also like
- Addition Number Six The Con'-Stant Di-Rec-Tiv'I-Ty White Horn White PaperDocument4 pagesAddition Number Six The Con'-Stant Di-Rec-Tiv'I-Ty White Horn White Paperjosiasns5257No ratings yet
- Push-Pull Amplifier Transformers PDFDocument3 pagesPush-Pull Amplifier Transformers PDFjimmy67music100% (1)
- Active Hi-Fi LoudspeakersDocument17 pagesActive Hi-Fi LoudspeakersCarioquenhoNo ratings yet
- Directivity in Loudspeaker SystemsDocument14 pagesDirectivity in Loudspeaker SystemsDan HauerNo ratings yet
- Understanding Line Arrays: by Mark HartshornDocument2 pagesUnderstanding Line Arrays: by Mark HartshornEl Iimperio 73No ratings yet
- Optimisation Technics For Horn Loaded Speakers R.C.morgansDocument373 pagesOptimisation Technics For Horn Loaded Speakers R.C.morgansBob BeduneauNo ratings yet
- Mutual Coupling Between LoudspeakersDocument40 pagesMutual Coupling Between LoudspeakersDenys FormigaNo ratings yet
- AES143 PD05 Loudspeaker & Amplifier Power Ratings Rev04Document25 pagesAES143 PD05 Loudspeaker & Amplifier Power Ratings Rev04bqmbqng kqryqntoNo ratings yet
- Speaker Crossover LabDocument51 pagesSpeaker Crossover LabRoland HendriksNo ratings yet
- Elektor PPP 2001.májusDocument11 pagesElektor PPP 2001.májussoyagurt100% (1)
- Briggs 1961 A To Z in AudioDocument225 pagesBriggs 1961 A To Z in AudioDragozmaj100% (1)
- Loudspeakers Coverage AnglesDocument0 pagesLoudspeakers Coverage AnglesAnthony HubbardNo ratings yet
- Motional Feedback On A Loudspeaker WooferDocument122 pagesMotional Feedback On A Loudspeaker WooferValk1902No ratings yet
- Amp TuburiDocument8 pagesAmp Tuburinicolae12100% (1)
- 300B Mk1 Single Ended TriodeDocument37 pages300B Mk1 Single Ended Triodetvpham123No ratings yet
- Measuring Loudspeaker Low-Frequency Response by Joe D'AppolitoDocument21 pagesMeasuring Loudspeaker Low-Frequency Response by Joe D'AppolitoTrajkoNo ratings yet
- Olson Direct Radiator Loudspeaker EnclosuresDocument5 pagesOlson Direct Radiator Loudspeaker Enclosureskorea12345fsfagvdsvNo ratings yet
- Tube CAD Journal Jan 2001Document29 pagesTube CAD Journal Jan 2001maher9No ratings yet
- Loudspeaker Impedance With Sia Smaartlive: Paul D. HendersonDocument7 pagesLoudspeaker Impedance With Sia Smaartlive: Paul D. HendersonGabo CodornizNo ratings yet
- Bessel Filter Crossover and Its Relation To OthersDocument8 pagesBessel Filter Crossover and Its Relation To OthersSt ChristianNo ratings yet
- An LP Primer: How The LP WorksDocument4 pagesAn LP Primer: How The LP WorksAmir Sanjary ComposerNo ratings yet
- LineArrays WhitePaperDocument14 pagesLineArrays WhitePaperAlenMomirovićNo ratings yet
- Eekels' MinisDocument18 pagesEekels' MinisjanedrunkerNo ratings yet
- The Jordan Loudspeaker Manual Chapter 6Document5 pagesThe Jordan Loudspeaker Manual Chapter 6Adam PaulNo ratings yet
- J 39 Mat Lab Program Crossover DesignDocument15 pagesJ 39 Mat Lab Program Crossover DesignismailNo ratings yet
- Bob PhaseDocument7 pagesBob Phasealecs serbNo ratings yet
- LoudspeakerDocument55 pagesLoudspeakerrajeshNo ratings yet
- Tube CAD Journal Mar 2001Document28 pagesTube CAD Journal Mar 2001maher9No ratings yet
- Newnes Audio and Hi-Fi Engineer's Pocket BookFrom EverandNewnes Audio and Hi-Fi Engineer's Pocket BookRating: 1 out of 5 stars1/5 (1)
- Designing Quiet Structures: A Sound Power Minimization ApproachFrom EverandDesigning Quiet Structures: A Sound Power Minimization ApproachNo ratings yet
- Loudspeaker AlignmentsDocument6 pagesLoudspeaker AlignmentsTulio Aguiar RezendeNo ratings yet
- Audio Levels DBu DBV and The Gang What You Need To KnowDocument5 pagesAudio Levels DBu DBV and The Gang What You Need To KnowFrancisco HernandezNo ratings yet
- 6C33C-B OTL Amplifier - Background and OTL CircuitsDocument14 pages6C33C-B OTL Amplifier - Background and OTL CircuitsettorreitNo ratings yet
- Measuring Thiele - Small ParametersDocument11 pagesMeasuring Thiele - Small ParameterscasanmartinmNo ratings yet
- RIAA Preamps Part 2Document15 pagesRIAA Preamps Part 2cyclickbobNo ratings yet
- Onken - Calc (1) 414 AlnicoDocument4 pagesOnken - Calc (1) 414 AlnicoRoberto KielNo ratings yet
- Project On SpeakerDocument81 pagesProject On SpeakerAbhi NandanNo ratings yet
- Acoustic Lens Family1Document4 pagesAcoustic Lens Family1Roberto KielNo ratings yet
- New Push-Pull Tube Amplifiers: Menno Van Der VeenDocument8 pagesNew Push-Pull Tube Amplifiers: Menno Van Der VeenMarcus CoresiNo ratings yet
- 1978 - Loudspeaker System Design - Three-Enclosure System With Active Delay and Crossover (Linkwitz)Document16 pages1978 - Loudspeaker System Design - Three-Enclosure System With Active Delay and Crossover (Linkwitz)ettorreitNo ratings yet
- Final Report (Speaker Design)Document22 pagesFinal Report (Speaker Design)sudhamshuNo ratings yet
- Tube Program Equalizer 3 Bands of Glory AnalogvibesDocument8 pagesTube Program Equalizer 3 Bands of Glory AnalogvibesbertosamNo ratings yet
- Eisner1967-Solution of The Webster Horn EquationDocument21 pagesEisner1967-Solution of The Webster Horn EquationBob Beduneau100% (1)
- HE Advantages of Horn Type Loudspeakers: A Compound Horn LoudspeakerDocument5 pagesHE Advantages of Horn Type Loudspeakers: A Compound Horn LoudspeakerBob BeduneauNo ratings yet
- Linkwitz Riley Crossovers PrimerDocument14 pagesLinkwitz Riley Crossovers Primeruh8spam2junk1No ratings yet
- Impulse Alignment of Loudspeakers and MicrophonesDocument14 pagesImpulse Alignment of Loudspeakers and MicrophonesyogimgurtNo ratings yet
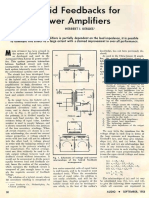
- Hybrid Feedbacks For Power Amplifiers (Acrosound Ultra-Linear II) - Herbert I. Keroes (Audio, Sep 1958)Document6 pagesHybrid Feedbacks For Power Amplifiers (Acrosound Ultra-Linear II) - Herbert I. Keroes (Audio, Sep 1958)jimmy67musicNo ratings yet
- Hi-Vi Re Search Loud Speak ErsDocument11 pagesHi-Vi Re Search Loud Speak ErsDomingo AngelNo ratings yet
- How Much Amplifier Power Do I NeedDocument17 pagesHow Much Amplifier Power Do I NeedjunverNo ratings yet
- Analog Filter Design Demystified: The Theory of Analog ElectronicsDocument11 pagesAnalog Filter Design Demystified: The Theory of Analog ElectronicsSanjay Parelkar100% (1)
- Mu Stage Philosophy: Alan KimmelDocument10 pagesMu Stage Philosophy: Alan KimmelbigpriapNo ratings yet
- Transmission Line Derivation Perry Marshall PDFDocument20 pagesTransmission Line Derivation Perry Marshall PDFmerrickNo ratings yet
- Datasheet f1010Document8 pagesDatasheet f1010shobu21100% (1)
- Keele (1975-05 AES Preprint) - Whats So Sacred Exp HornsDocument33 pagesKeele (1975-05 AES Preprint) - Whats So Sacred Exp HornsBob BeduneauNo ratings yet
- Acoustic Measurement TipsDocument6 pagesAcoustic Measurement TipsIrfangiNo ratings yet
- EL34 PP AmpDocument5 pagesEL34 PP AmpVasilis TsekourasNo ratings yet
- Electrical Spectrum and Network Analyzers: A Practical ApproachFrom EverandElectrical Spectrum and Network Analyzers: A Practical ApproachNo ratings yet
- Math Geo GuitarDocument20 pagesMath Geo GuitarcoquizzzNo ratings yet
- J S Bach Prelude 1 From Cello Suite 1 PDFDocument5 pagesJ S Bach Prelude 1 From Cello Suite 1 PDFVictor Hernandez Medina100% (1)
- Music 120 Syllabus PDFDocument3 pagesMusic 120 Syllabus PDFVictor Hernandez MedinaNo ratings yet
- Max MathewsDocument5 pagesMax MathewsVictor Hernandez MedinaNo ratings yet
- Jazz TheoryDocument89 pagesJazz Theorymelvin_leong100% (18)
- ESP-WROOM-32D/ESP32-WROOM-32U Datasheet: Espressif SystemsDocument25 pagesESP-WROOM-32D/ESP32-WROOM-32U Datasheet: Espressif SystemsVictor Hernandez MedinaNo ratings yet
- Jazz TheoryDocument89 pagesJazz Theorymelvin_leong100% (18)
- Digital Synthesis of MusicDocument3 pagesDigital Synthesis of MusicVictor Hernandez MedinaNo ratings yet
- Jazz TheoryDocument89 pagesJazz Theorymelvin_leong100% (18)
- Eternity of Sound and The Science of Mantras - Acharya, Pt. Shriram Sharma Resistance2010Document157 pagesEternity of Sound and The Science of Mantras - Acharya, Pt. Shriram Sharma Resistance2010Sevan Bomar96% (23)
- Book Review Music A e ScientiaeDocument6 pagesBook Review Music A e ScientiaeVictor Hernandez MedinaNo ratings yet
- Digital Synthesis of MusicDocument3 pagesDigital Synthesis of MusicVictor Hernandez MedinaNo ratings yet
- Spanish Fly Manual PDFDocument4 pagesSpanish Fly Manual PDFVictor Hernandez MedinaNo ratings yet
- Tutorial OfBook - SoundDocument13 pagesTutorial OfBook - SoundVictor Hernandez MedinaNo ratings yet
- Eternity of Sound and The Science of Mantras - Acharya, Pt. Shriram Sharma Resistance2010Document157 pagesEternity of Sound and The Science of Mantras - Acharya, Pt. Shriram Sharma Resistance2010Sevan Bomar96% (23)
- Spanish FlyDocument5 pagesSpanish FlyVictor Hernandez MedinaNo ratings yet
- Audio Electronics Tube Amplifiers Byrith Power Amplifiers With ValvesDocument34 pagesAudio Electronics Tube Amplifiers Byrith Power Amplifiers With ValvesIvan KopićNo ratings yet
- Guidelines For Measuring Audio Power Amplifier Performance (Texas Instruments) PDFDocument29 pagesGuidelines For Measuring Audio Power Amplifier Performance (Texas Instruments) PDFVictor Hernandez MedinaNo ratings yet
- Clique UserManualDocument16 pagesClique UserManualVictor Hernandez MedinaNo ratings yet
- Anaconda QuickstartDocument5 pagesAnaconda QuickstartRenato Guimarães0% (1)
- Speaker Cables - Science or Snake Oil (Nelson Pass) PDFDocument6 pagesSpeaker Cables - Science or Snake Oil (Nelson Pass) PDFVictor Hernandez MedinaNo ratings yet
- Snsa Audodsl O Embedded de EsDocument15 pagesSnsa Audodsl O Embedded de EsVictor Hernandez MedinaNo ratings yet
- Music 120 Syllabus PDFDocument3 pagesMusic 120 Syllabus PDFVictor Hernandez MedinaNo ratings yet
- Coil UserManualDocument15 pagesCoil UserManualVictor Hernandez MedinaNo ratings yet
- DIY Synth 1 - Sound Output - The Blog at The Bottom of The SeaDocument6 pagesDIY Synth 1 - Sound Output - The Blog at The Bottom of The SeaVictor Hernandez MedinaNo ratings yet
- 5 Best Eclipse Plugins - #1 (Eclox With Doxygen, Graphviz and Mscgen) - MCU On EclipseDocument26 pages5 Best Eclipse Plugins - #1 (Eclox With Doxygen, Graphviz and Mscgen) - MCU On EclipseVictor Hernandez MedinaNo ratings yet
- DIY Synth 2 - Common Wave Forms - The Blog at The Bottom of The SeaDocument11 pagesDIY Synth 2 - Common Wave Forms - The Blog at The Bottom of The SeaVictor Hernandez Medina100% (1)
- Digital Sound Generation 1Document85 pagesDigital Sound Generation 1badger84No ratings yet
- Analog Computer ManualDocument51 pagesAnalog Computer ManualYlver Prado YesquenNo ratings yet