You might also like
- Nickel Alloy TubesDocument5 pagesNickel Alloy TubesJulio Vega AngelesNo ratings yet
- Termpaper-Mechanical Vibration: Topic-Vibration of MembranesDocument10 pagesTermpaper-Mechanical Vibration: Topic-Vibration of MembranesJulio Vega AngelesNo ratings yet
- Steelcord enDocument2 pagesSteelcord enJulio Vega AngelesNo ratings yet
- Silotop Zero en 0217 EditDocument4 pagesSilotop Zero en 0217 EditJulio Vega AngelesNo ratings yet
- Robot Arm Without Using Robot Language and Its Application To Machining ProcessDocument5 pagesRobot Arm Without Using Robot Language and Its Application To Machining ProcessJulio Vega AngelesNo ratings yet
- Uxm 30ln PW LidarDocument2 pagesUxm 30ln PW LidarJulio Vega Angeles100% (1)
- Flyer Robot ES165D E 11.2012 05 PDFDocument2 pagesFlyer Robot ES165D E 11.2012 05 PDFJulio Vega AngelesNo ratings yet
- Influence of A Humanoid Robot in Human Decision MakingDocument2 pagesInfluence of A Humanoid Robot in Human Decision MakingJulio Vega AngelesNo ratings yet
- Energy RV-K Foc PDFDocument8 pagesEnergy RV-K Foc PDFJulio Vega AngelesNo ratings yet
- Ceosby GroupDocument120 pagesCeosby GroupJulio Vega AngelesNo ratings yet
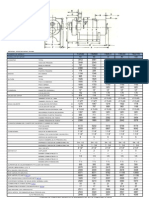
- Boiler Specifications 1Document1 pageBoiler Specifications 1Julio Vega AngelesNo ratings yet
- Alesometros y Otros MitutoyoDocument32 pagesAlesometros y Otros MitutoyoJulio Vega AngelesNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- PVAR Catalog PDFDocument16 pagesPVAR Catalog PDFrenebbNo ratings yet
- 05-2806a01-L-Mds Inet Series Ref ManDocument173 pages05-2806a01-L-Mds Inet Series Ref ManPedro Vives MelendezNo ratings yet
- Set Point and Alarm List (Threshold) Fgs SystemDocument1 pageSet Point and Alarm List (Threshold) Fgs SystemjajakaNo ratings yet
- Pressure Transmitter 699 BA Full enDocument16 pagesPressure Transmitter 699 BA Full enJose Lorenzo ToralNo ratings yet
- ScatsDocument45 pagesScatsJavierNo ratings yet
- Karnataka PWD SR 11-12Document446 pagesKarnataka PWD SR 11-12NITESH SINGHNo ratings yet
- SkleníkDocument6 pagesSkleníkOlin StejNo ratings yet
- Copyreading and HWDocument16 pagesCopyreading and HWJenniferNo ratings yet
- NKW Black Decker Detector de Estructuras Metal y Cables Modelo 9v SL1 3YD& - Itemid 161705786158Document3 pagesNKW Black Decker Detector de Estructuras Metal y Cables Modelo 9v SL1 3YD& - Itemid 161705786158tordos7183No ratings yet
- Street FurnitureDocument225 pagesStreet FurnitureLuciola Plagad100% (7)
- Case Study: Capacity Expansion For Transportation Project - San Antonio's Project, BoliviaDocument3 pagesCase Study: Capacity Expansion For Transportation Project - San Antonio's Project, BoliviaMuhammad ImranNo ratings yet
- Interactive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Document43 pagesInteractive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768JorgeNo ratings yet
- Design of UFP-coupled Post-Tensioned Timber Shear WallsDocument10 pagesDesign of UFP-coupled Post-Tensioned Timber Shear WallsRafael Arízaga BravoNo ratings yet
- Annex C Sample Filled Up FormDocument12 pagesAnnex C Sample Filled Up FormChe LVNo ratings yet
- Ashutosh Jaiswal Resume (NEW)Document2 pagesAshutosh Jaiswal Resume (NEW)api-3707632No ratings yet
- Accessory Drive - Remove and Install - Accessory Drive SAE "A"Document5 pagesAccessory Drive - Remove and Install - Accessory Drive SAE "A"Mbahdiro KolenxNo ratings yet
- Honda Gx35Document1 pageHonda Gx35kelumpj8479100% (1)
- DAIKIN PRICING & PIPING LENGTH - Non Inverter Series (19 - 5 - 16) PDFDocument3 pagesDAIKIN PRICING & PIPING LENGTH - Non Inverter Series (19 - 5 - 16) PDFIswadi Bin ZulkarnainNo ratings yet
- Blown FilmDocument4 pagesBlown Filmwahyutrisutrisno91No ratings yet
- Free ScaleDocument39 pagesFree ScaleRavi VarmaNo ratings yet
- Syllabus For Non Conventional Energy Systems: Faculty In-Charge: Category: Total Number of HoursDocument63 pagesSyllabus For Non Conventional Energy Systems: Faculty In-Charge: Category: Total Number of HoursAdenKlatenNo ratings yet
- Raise Borer EpirocDocument8 pagesRaise Borer EpirocDiego Ignacio VelizNo ratings yet
- Lameller - Teknik Bilgi Ve Lamel SeçimiDocument19 pagesLameller - Teknik Bilgi Ve Lamel SeçimibilgeNo ratings yet
- Casting Defects With Respect To Indian Standards On Cast Iron in FoundryDocument15 pagesCasting Defects With Respect To Indian Standards On Cast Iron in FoundryKhushal TripathiNo ratings yet
- UpRight LX31Document167 pagesUpRight LX31Krum KashavarovNo ratings yet
- Design and Fault Analysis of EHV HVDC Transmission Line Using MATLAB SimulinkDocument19 pagesDesign and Fault Analysis of EHV HVDC Transmission Line Using MATLAB SimulinkShubham Bodade100% (1)
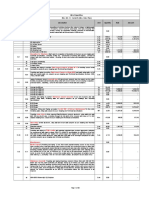
- BOQ CulvertDocument38 pagesBOQ CulvertDeepak_pethkarNo ratings yet
- VicRoads Standard Drawings For Road SignsDocument106 pagesVicRoads Standard Drawings For Road Signsyyanan1118100% (1)
- Voltro II Electrical Insulating Oil 4 2018Document2 pagesVoltro II Electrical Insulating Oil 4 2018die_1No ratings yet
- Method Statement - Asphalt Road Rectification Completion Rev. 1Document7 pagesMethod Statement - Asphalt Road Rectification Completion Rev. 1anon_759550912No ratings yet