You might also like
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Chapter-3-Linear Models For RegressionDocument61 pagesChapter-3-Linear Models For Regressionlongfei zhang100% (1)
- Pattern Recognition Machine Learning: Chapter 3: Linear Models For RegressionDocument48 pagesPattern Recognition Machine Learning: Chapter 3: Linear Models For RegressionHarish Kumar J100% (1)
- Uncertainty Evaluation in Reservoir Forecasting by Bayes Linear MethodologyDocument10 pagesUncertainty Evaluation in Reservoir Forecasting by Bayes Linear MethodologyrezaNo ratings yet
- Machine Learning and Pattern Recognition Bayesian Complexity ControlDocument4 pagesMachine Learning and Pattern Recognition Bayesian Complexity ControlzeliawillscumbergNo ratings yet
- Bayesian Monte Carlo: Carl Edward Rasmussen and Zoubin GhahramaniDocument8 pagesBayesian Monte Carlo: Carl Edward Rasmussen and Zoubin GhahramanifishelderNo ratings yet
- Homework 5: Fitting: Problem 1: Parity-Violating AsymmetryDocument7 pagesHomework 5: Fitting: Problem 1: Parity-Violating AsymmetryLevi GrantzNo ratings yet
- 9 Unsupervised Learning: 9.1 K-Means ClusteringDocument34 pages9 Unsupervised Learning: 9.1 K-Means ClusteringJavier RivasNo ratings yet
- LFD 2005 Nearest NeighbourDocument6 pagesLFD 2005 Nearest NeighbourAnahi SánchezNo ratings yet
- Unit 2Document35 pagesUnit 2shruthikagudemNo ratings yet
- Snelson 2005 Sparse GpsDocument8 pagesSnelson 2005 Sparse GpsDonlapark PornnopparathNo ratings yet
- 2 - Ijpast 512 V16N1.170230601Document13 pages2 - Ijpast 512 V16N1.170230601Ahmed FenneurNo ratings yet
- Data Augmentation For Support Vector Machines: Mallick Et Al. 2005 George and Mcculloch 1993 1997 Ishwaran and Rao 2005Document24 pagesData Augmentation For Support Vector Machines: Mallick Et Al. 2005 George and Mcculloch 1993 1997 Ishwaran and Rao 2005EZ112No ratings yet
- V21i03 PDFDocument18 pagesV21i03 PDFelardNo ratings yet
- Q. 1) What Is Class Condition Density? (3 Marks) AnsDocument12 pagesQ. 1) What Is Class Condition Density? (3 Marks) AnsMrunal BhilareNo ratings yet
- Stuart 81Document25 pagesStuart 81Sebastian CulquiNo ratings yet
- R Lab - Probability DistributionsDocument10 pagesR Lab - Probability DistributionsPranay PandeyNo ratings yet
- Codigo Box Cox SASDocument37 pagesCodigo Box Cox SASRodrigo Romo MuñozNo ratings yet
- On Adding and Subtracting Eigenspaces With Evd and SVD: Peter Hall David Marshall Ralph MartinDocument16 pagesOn Adding and Subtracting Eigenspaces With Evd and SVD: Peter Hall David Marshall Ralph Martinstat_istaNo ratings yet
- Matemath For Data ScienceDocument10 pagesMatemath For Data ScienceSuryanNo ratings yet
- CHAPTER 3 Diabetes Research PaperDocument18 pagesCHAPTER 3 Diabetes Research PaperSRPC ECENo ratings yet
- Lossless Online Bayesian Bagging: Herbert K. H. LeeDocument9 pagesLossless Online Bayesian Bagging: Herbert K. H. LeeAmit SinghNo ratings yet
- Bayesian Uncertainty QuantificationDocument23 pagesBayesian Uncertainty QuantificationKowshik ThopalliNo ratings yet
- Lecture 13: Introduction To Generalized Linear Models: 21 November 2007Document12 pagesLecture 13: Introduction To Generalized Linear Models: 21 November 2007ghanim169No ratings yet
- Prob Level SetsDocument8 pagesProb Level SetsalbertopianoflautaNo ratings yet
- Uniform Distribution (Continuous)Document5 pagesUniform Distribution (Continuous)afjkjchhghgfbfNo ratings yet
- F (X) Is ReviewedDocument18 pagesF (X) Is ReviewedSumedh KakdeNo ratings yet
- CHP 1curve FittingDocument21 pagesCHP 1curve FittingAbrar HashmiNo ratings yet
- A Tutorial On The Gamma TestDocument9 pagesA Tutorial On The Gamma TestGregory GuthrieNo ratings yet
- 123 WPS OfficeDocument7 pages123 WPS OfficeMichael GreyNo ratings yet
- Linear RegressionDocument4 pagesLinear RegressionHemant GargNo ratings yet
- Theory For Penalised Spline Regression: Peter - Hall@anu - Edu.auDocument14 pagesTheory For Penalised Spline Regression: Peter - Hall@anu - Edu.auAnn FeeNo ratings yet
- MCMC OriginalDocument6 pagesMCMC OriginalAleksey OrlovNo ratings yet
- Data Fusion in Radial Basis Function Networks For Spatial RegressionDocument13 pagesData Fusion in Radial Basis Function Networks For Spatial RegressionGhassanNo ratings yet
- Chapter 4..1Document19 pagesChapter 4..1Ed CasasNo ratings yet
- Appendix Nonparametric RegressionDocument17 pagesAppendix Nonparametric Regressionamara abdelkarimeNo ratings yet
- Classical LinearReg 000Document41 pagesClassical LinearReg 000Umair AyazNo ratings yet
- Machine Learning and Pattern Recognition Week 3 Intro - ClassificationDocument5 pagesMachine Learning and Pattern Recognition Week 3 Intro - ClassificationzeliawillscumbergNo ratings yet
- Yale PDFDocument6 pagesYale PDFthyagosmesmeNo ratings yet
- Applied and Computational Harmonic Analysis: Emmanuel J. Candès, Mark A. DavenportDocument7 pagesApplied and Computational Harmonic Analysis: Emmanuel J. Candès, Mark A. DavenportCatalin TomaNo ratings yet
- American Statistical Association American Society For QualityDocument8 pagesAmerican Statistical Association American Society For QualityAlbanita MendesNo ratings yet
- Ps 4Document6 pagesPs 4tony1337No ratings yet
- Polynomial Curve Fitting in MatlabDocument3 pagesPolynomial Curve Fitting in MatlabKhan Arshid IqbalNo ratings yet
- Summary Machine LearningDocument15 pagesSummary Machine LearningtjNo ratings yet
- Estimating The Support of A High-Dimensional DistributionDocument28 pagesEstimating The Support of A High-Dimensional DistributionAndrés López GibsonNo ratings yet
- Annals Rev Engineering Dynamic NetworksDocument10 pagesAnnals Rev Engineering Dynamic NetworkshmuffNo ratings yet
- Design of Experiments: There Are Many Books That Address Experimental Design and Present FactoDocument33 pagesDesign of Experiments: There Are Many Books That Address Experimental Design and Present Factorarunr1No ratings yet
- Sparse Precision Matrix Estimation Via Lasso Penalized D-Trace LossDocument18 pagesSparse Precision Matrix Estimation Via Lasso Penalized D-Trace LossReshma KhemchandaniNo ratings yet
- 13 - Data Mining Within A Regression FrameworkDocument27 pages13 - Data Mining Within A Regression FrameworkEnzo GarabatosNo ratings yet
- Divide and Conquer Kernel Ridge Regression: University of California, Berkeley University of California, BerkeleyDocument26 pagesDivide and Conquer Kernel Ridge Regression: University of California, Berkeley University of California, BerkeleyTiberiu TincaNo ratings yet
- Unit 1Document21 pagesUnit 1read4freeNo ratings yet
- CS 601 Machine Learning Unit 5Document18 pagesCS 601 Machine Learning Unit 5Priyanka BhateleNo ratings yet
- The Cross Entropy Method For ClassificationDocument8 pagesThe Cross Entropy Method For ClassificationDocente Fede TecnologicoNo ratings yet
- Monte Carlo Techniques For Bayesian Statistical Inference - A Comparative ReviewDocument15 pagesMonte Carlo Techniques For Bayesian Statistical Inference - A Comparative Reviewasdfgh132No ratings yet
- Histogram Charts in Matlab: Data Analysis StatisticsDocument13 pagesHistogram Charts in Matlab: Data Analysis Statisticsmamaadam02No ratings yet
- ESL: Chapter 1: 1.1 Introduction To Linear RegressionDocument4 pagesESL: Chapter 1: 1.1 Introduction To Linear RegressionPete Jacopo Belbo CayaNo ratings yet
- Adaptor NipsDocument8 pagesAdaptor NipsIvandiNo ratings yet
- Bishop2008 Chapter ANewFrameworkForMachineLearninDocument24 pagesBishop2008 Chapter ANewFrameworkForMachineLearninMassimo TormenNo ratings yet
- COMSOL Conf CardiffDocument8 pagesCOMSOL Conf CardiffLexin LiNo ratings yet
- 1 - Intro To Statistical Research Methods: ConstructsDocument2 pages1 - Intro To Statistical Research Methods: ConstructsSaurabh ShuklaNo ratings yet
- 2 - Visualizing Data: FrequencyDocument4 pages2 - Visualizing Data: FrequencySaurabh ShuklaNo ratings yet
- Interview Prep For Junior QuantsDocument9 pagesInterview Prep For Junior QuantsjjusufzNo ratings yet
- Careers in Quant: A Student's PerspectiveDocument15 pagesCareers in Quant: A Student's PerspectiveSaurabh ShuklaNo ratings yet
- COMPUTER NETWORKS - LAB-2-Explaining HTTP Traffic Using WiresharkDocument8 pagesCOMPUTER NETWORKS - LAB-2-Explaining HTTP Traffic Using Wiresharknaveen jaiswalNo ratings yet
- Interview Prep For Junior QuantsDocument9 pagesInterview Prep For Junior QuantsjjusufzNo ratings yet
- OopDocument3 pagesOopSaurabh ShuklaNo ratings yet
- CSC 212: Data Structures and Abstractions University of Rhode IslandDocument2 pagesCSC 212: Data Structures and Abstractions University of Rhode IslandSaurabh ShuklaNo ratings yet
- Class Normalization IIIDocument67 pagesClass Normalization IIISaurabh ShuklaNo ratings yet
- MLEx2 PDFDocument4 pagesMLEx2 PDFSaurabh ShuklaNo ratings yet
- Interview Prep For Junior QuantsDocument9 pagesInterview Prep For Junior QuantsjjusufzNo ratings yet
- Search Engines: Information Retrieval in PracticeDocument22 pagesSearch Engines: Information Retrieval in Practicesushi08No ratings yet
- Hass Poset DiagramsDocument14 pagesHass Poset DiagramsSaurabh ShuklaNo ratings yet
- ProgramDocument65 pagesProgramSaurabh ShuklaNo ratings yet
- DADM - Cheat Sheet: Hypothesis Testing Two Way AnovaDocument2 pagesDADM - Cheat Sheet: Hypothesis Testing Two Way AnovaAnshika JainNo ratings yet
- BigDatal PDFDocument50 pagesBigDatal PDFFahim GeyasNo ratings yet
- Question Text: Correct Mark 1.00 Out of 1.00Document6 pagesQuestion Text: Correct Mark 1.00 Out of 1.00sosa farrelleNo ratings yet
- Math Biostatistics Boot Camp 1Document3 pagesMath Biostatistics Boot Camp 1Jerry Taylor100% (1)
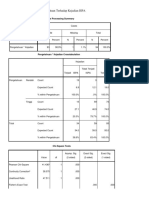
- Hasil Tabulasi Chi-Square Pengetahuan Terhadap Kejadian ISPADocument6 pagesHasil Tabulasi Chi-Square Pengetahuan Terhadap Kejadian ISPALalu Rizki Andri SaputraNo ratings yet
- Correlation and Regression AnalysisDocument23 pagesCorrelation and Regression AnalysispranayNo ratings yet
- P7 - Spatial RegressionDocument27 pagesP7 - Spatial RegressionUp ToyouNo ratings yet
- Correlation Coefficients: Mean Bias and Confidence Interval DistortionsDocument14 pagesCorrelation Coefficients: Mean Bias and Confidence Interval DistortionsmorisNo ratings yet
- Chapter 2 - Solution: Part (A)Document8 pagesChapter 2 - Solution: Part (A)Arjun Vk100% (1)
- Assignment 1 Statistics Masters LevelDocument16 pagesAssignment 1 Statistics Masters Levelusha100% (1)
- Data Mining Cheat SheetDocument6 pagesData Mining Cheat SheetNourheneMbarekNo ratings yet
- An Introduction To Factor Analysis: Philip HylandDocument34 pagesAn Introduction To Factor Analysis: Philip HylandAtiqah NizamNo ratings yet
- Two Sample Inference: By: Girma MDocument33 pagesTwo Sample Inference: By: Girma MAdinaan ShaafiiNo ratings yet
- SamplingDocument8 pagesSamplingmathilde.lemfrogNo ratings yet
- Assessing The Impact of Public Capital On Industrial Development and Its Resulting Effect On GDP GrowthDocument36 pagesAssessing The Impact of Public Capital On Industrial Development and Its Resulting Effect On GDP GrowthKasnopichNo ratings yet
- Loaded Hip Thrust-Based PAP Protocol Effects On Acceleration and Sprint Performance of Handball PlayersDocument9 pagesLoaded Hip Thrust-Based PAP Protocol Effects On Acceleration and Sprint Performance of Handball PlayersPaulo JorgeNo ratings yet
- NO. X X X FEV: Adjusted R Square Std. Error of The Estimate 1 .036 .001 - .070 .9143 A. Predictors: (Constant), X1Document8 pagesNO. X X X FEV: Adjusted R Square Std. Error of The Estimate 1 .036 .001 - .070 .9143 A. Predictors: (Constant), X1Nurhumairah YusufNo ratings yet
- SMPTHO4 With AnswersDocument14 pagesSMPTHO4 With AnswersFUNTV5100% (1)
- Exponential SmoothingDocument9 pagesExponential SmoothingIsabel Del Mar RiveraNo ratings yet
- Eko Muryanto EkonomiDocument11 pagesEko Muryanto EkonomiFuso HagaNo ratings yet
- Macro 1 - BootstrapDocument10 pagesMacro 1 - Bootstrapapi-297722278No ratings yet
- Maccallum On Dichotomizing PDFDocument22 pagesMaccallum On Dichotomizing PDFNicole OlsenNo ratings yet
- AssignmentDocument4 pagesAssignmentapi-253385147No ratings yet
- Module 4Document18 pagesModule 4JHEZA PITOGONo ratings yet
- Assignment No1 MLDocument5 pagesAssignment No1 MLakramullah khanNo ratings yet
- C4-LP1 - Computing The Point Estimate of A Population MeanDocument5 pagesC4-LP1 - Computing The Point Estimate of A Population Meanlor roaNo ratings yet
- ML Important TopicDocument13 pagesML Important TopicYt FanfestNo ratings yet
- 01 - IE3120 Forecasting HandoutDocument29 pages01 - IE3120 Forecasting HandoutGabrielNo ratings yet
- Time Series Modelling Using Eviews 2. Macroeconomic Modelling Using Eviews 3. Macroeconometrics Using EviewsDocument29 pagesTime Series Modelling Using Eviews 2. Macroeconomic Modelling Using Eviews 3. Macroeconometrics Using Eviewsshobu_iujNo ratings yet
- Binary Diagnostic Tests - Single SampleDocument6 pagesBinary Diagnostic Tests - Single SamplescjofyWFawlroa2r06YFVabfbajNo ratings yet