You might also like
- Design of Wind Turbine: December 2015Document40 pagesDesign of Wind Turbine: December 2015Lavanya ChandranNo ratings yet
- National Institute of Wind Energy Chennai-600100: Provision Savings Declaration For The Year 2020-21Document2 pagesNational Institute of Wind Energy Chennai-600100: Provision Savings Declaration For The Year 2020-21Lavanya ChandranNo ratings yet
- ZHAO2015 Article FuzzyLogicBasedCoordinatedContDocument7 pagesZHAO2015 Article FuzzyLogicBasedCoordinatedContLavanya ChandranNo ratings yet
- ZHAO2015 Article FuzzyLogicBasedCoordinatedContDocument7 pagesZHAO2015 Article FuzzyLogicBasedCoordinatedContLavanya ChandranNo ratings yet
- TLWG Questions and Answers PDFDocument22 pagesTLWG Questions and Answers PDFLavanya ChandranNo ratings yet
- Airplane and LightningstrikeDocument8 pagesAirplane and LightningstrikeYadav Khagendra KumarNo ratings yet
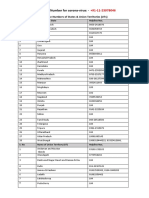
- Cor On Va Virus Helpline NumberDocument1 pageCor On Va Virus Helpline NumberAim Softnet IT ProfessionalNo ratings yet
- 10 - UkaniszynDocument11 pages10 - UkaniszynLavanya ChandranNo ratings yet
- EMI Reduction Techniques for PCsDocument6 pagesEMI Reduction Techniques for PCsPawan SehrawatNo ratings yet
- Format Cea 1Document2 pagesFormat Cea 1Lavanya ChandranNo ratings yet
- Application For New Plastic Card (Modified)Document3 pagesApplication For New Plastic Card (Modified)ajay153No ratings yet
- Note2 PDFDocument82 pagesNote2 PDFLavanya ChandranNo ratings yet
- Amendment Act 2019Document10 pagesAmendment Act 2019Taniya GargNo ratings yet
- MMF Control Algorithm For Torque and Speed Ripple Reduction in BLDC MotorDocument8 pagesMMF Control Algorithm For Torque and Speed Ripple Reduction in BLDC MotorLavanya ChandranNo ratings yet
- Electricity Demand Evaluation For Rural Electrification IJERTV4IS060726Document4 pagesElectricity Demand Evaluation For Rural Electrification IJERTV4IS060726Lavanya ChandranNo ratings yet
- 63 Lowell Wind Review PDFDocument22 pages63 Lowell Wind Review PDFLavanya ChandranNo ratings yet
- Distributed Secondary Control With Reduced Communi PDFDocument7 pagesDistributed Secondary Control With Reduced Communi PDFLavanya ChandranNo ratings yet
- A Comprehensive Review On Establishment of Isolated Microgrid With Renewable Sources For Remote IslandsDocument9 pagesA Comprehensive Review On Establishment of Isolated Microgrid With Renewable Sources For Remote IslandsLavanya ChandranNo ratings yet
- QuestionsDocument23 pagesQuestionsLavanya ChandranNo ratings yet
- Distributed Secondary Control With Reduced Communi PDFDocument7 pagesDistributed Secondary Control With Reduced Communi PDFLavanya ChandranNo ratings yet
- Modeling and Simulation of DIGSILENT-based Micro-Grid SystemDocument8 pagesModeling and Simulation of DIGSILENT-based Micro-Grid SystemAli KarasukogluNo ratings yet
- Effective - Reading Skills PDFDocument11 pagesEffective - Reading Skills PDFLavanya ChandranNo ratings yet
- Modeling and Simulation of DIGSILENT-based Micro-Grid SystemDocument8 pagesModeling and Simulation of DIGSILENT-based Micro-Grid SystemAli KarasukogluNo ratings yet
- Session 9 Allison Integrated Physical Control System Design Horizontal Axis Wind TurbinesDocument17 pagesSession 9 Allison Integrated Physical Control System Design Horizontal Axis Wind TurbinesLavanya ChandranNo ratings yet
- IeeeDocument5 pagesIeeeLavanya ChandranNo ratings yet
- FC MachineDocument1 pageFC MachineLavanya ChandranNo ratings yet
- Emi RatesDocument10 pagesEmi RatesLavanya ChandranNo ratings yet
- Remote Sensing Tools for Wind & Atmospheric AnalysisDocument1 pageRemote Sensing Tools for Wind & Atmospheric AnalysisLavanya ChandranNo ratings yet
- Prabodh Kit1Document60 pagesPrabodh Kit1Vasanth P0% (1)
- Production / Maintanence / Stores / Quality Executive: Job Posted byDocument3 pagesProduction / Maintanence / Stores / Quality Executive: Job Posted byLavanya ChandranNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Lampiran 3 - Tatacara Penggunaan IDB Analyzer PDFDocument11 pagesLampiran 3 - Tatacara Penggunaan IDB Analyzer PDFzulhariszan abd mananNo ratings yet
- CentOS 7 & 8 Self StudyDocument8 pagesCentOS 7 & 8 Self StudyLukki ArjunaNo ratings yet
- Atbm Fao ModuleDocument1 pageAtbm Fao ModuleBenjamín PérezNo ratings yet
- Project Guide - Tell A Data Story: BackgroundDocument4 pagesProject Guide - Tell A Data Story: BackgroundBhanu AdaveniNo ratings yet
- Akhila R Sr. Azure Infrastructure Engineer Mobile No: (919) 342-8446Document7 pagesAkhila R Sr. Azure Infrastructure Engineer Mobile No: (919) 342-8446Gopikrishna VenugopalNo ratings yet
- PCS Lab-1Document9 pagesPCS Lab-1Summan IshfaqNo ratings yet
- MPR Operator Handbook: Maritime Patrol Radar System ManualDocument150 pagesMPR Operator Handbook: Maritime Patrol Radar System Manualcharitha85No ratings yet
- DM74LS153 Dual 1-Of-4 Line Data Selectors/Multiplexers: General Description FeaturesDocument5 pagesDM74LS153 Dual 1-Of-4 Line Data Selectors/Multiplexers: General Description FeaturesBenito GarridoNo ratings yet
- Chapter 3 Control StructuresDocument36 pagesChapter 3 Control Structuresalvaeuv66No ratings yet
- Der DirectoryDocument262 pagesDer DirectoryBenNo ratings yet
- Verse ConfDocument30 pagesVerse ConfSongkeysNo ratings yet
- Guidelines in Writing The Technology Research Journal ArticleDocument5 pagesGuidelines in Writing The Technology Research Journal ArticleArlan GarcinesNo ratings yet
- Real-Time RCS Prediction Using GRECODocument11 pagesReal-Time RCS Prediction Using GRECOopedroestebanNo ratings yet
- SEALmatic MDocument2 pagesSEALmatic MMarcos RojasNo ratings yet
- Time Series: Chapter 4 - EstimationDocument53 pagesTime Series: Chapter 4 - EstimationTom AlexNo ratings yet
- Smart Mirror: A Reflective Interface To Maximize ProductivityDocument6 pagesSmart Mirror: A Reflective Interface To Maximize Productivityعلو الدوريNo ratings yet
- MS Excel 2013 LECTURE NOTESDocument51 pagesMS Excel 2013 LECTURE NOTESWANKYO JOSHUANo ratings yet
- 2023-1509 TopSolid'Design Library Designer's GuideDocument21 pages2023-1509 TopSolid'Design Library Designer's GuideMáy TiệnNo ratings yet
- Web Design Business PlanDocument43 pagesWeb Design Business Planwebsule67% (3)
- Pyqt5 Project 3Document10 pagesPyqt5 Project 3Yash RajputNo ratings yet
- QoS + PCQ MikrotikDocument4 pagesQoS + PCQ MikrotikFranklin PintoNo ratings yet
- 1 NT U1 History of ISDocument21 pages1 NT U1 History of ISriaz ahamedNo ratings yet
- Powerbi 3Document12 pagesPowerbi 3ashwinNo ratings yet
- Number: 350-401 Passing Score: 825 Time Limit: 140 Min File Version: 1.0Document45 pagesNumber: 350-401 Passing Score: 825 Time Limit: 140 Min File Version: 1.0MacKenzie KymberNo ratings yet
- Accessdata FTK Quick Installation Guide: PrerequisitesDocument15 pagesAccessdata FTK Quick Installation Guide: Prerequisitesrizal alghozaliNo ratings yet
- Infix, Postfix and Prefix EvalutionDocument8 pagesInfix, Postfix and Prefix EvalutionHager MassoudNo ratings yet
- Bearer Independe Protocol (BIP) WhitepaperDocument20 pagesBearer Independe Protocol (BIP) Whitepapergunasekaran.subramani387982% (11)
- Zavrsni Rad - Konacna VerzijaDocument5 pagesZavrsni Rad - Konacna VerzijaNaida GolaćNo ratings yet
- Lab ManualDocument34 pagesLab ManualEyob HabteNo ratings yet
- Data Visualization Alternatives to Pie ChartsDocument27 pagesData Visualization Alternatives to Pie ChartsRitvik JindalNo ratings yet