You might also like
- Steam Turbine and Governor (SimPowerSystems)Document5 pagesSteam Turbine and Governor (SimPowerSystems)hitmancuteadNo ratings yet
- Harmonics in Transformer: B.TechDocument31 pagesHarmonics in Transformer: B.TechSaheli MazumderNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- 430 15EC73 Power Electronics Notes (Vtupro Com) 2Document100 pages430 15EC73 Power Electronics Notes (Vtupro Com) 2KN DEEPSHINo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Comparison of Ieee and Iec Harmonic StandardsDocument3 pagesComparison of Ieee and Iec Harmonic StandardsrenegadeNo ratings yet
- 7kg6000 Transducer SpecificationDocument8 pages7kg6000 Transducer SpecificationwiyatnoNo ratings yet
- 12pulse Lci Synchronous Drive For A 20 MW Compressor Modeling SiDocument7 pages12pulse Lci Synchronous Drive For A 20 MW Compressor Modeling Sijeevan sankarNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Control System Lab ManualDocument76 pagesControl System Lab ManualYuvaraj Shan50% (2)
- Robicon VFD Perfect Harmony TheoryDocument71 pagesRobicon VFD Perfect Harmony TheorySteve Carvalho50% (2)
- Modelling and Simulation LabDocument55 pagesModelling and Simulation LabNobita NobiNo ratings yet
- Help - Permanent Magnet Synchronous Machine - Blocks (SimPowerSystems™)Document14 pagesHelp - Permanent Magnet Synchronous Machine - Blocks (SimPowerSystems™)lojain centerNo ratings yet
- Asynchronous MachineDocument21 pagesAsynchronous MachineMohanraj NidumoluNo ratings yet
- Induction Motor Design Using FEMMDocument13 pagesInduction Motor Design Using FEMMJunaid AhmadNo ratings yet
- Calculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsDocument4 pagesCalculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsShakeel RanaNo ratings yet
- Ee2257 LMDocument104 pagesEe2257 LMthamizmaniNo ratings yet
- Investigation of The Dynamic Performance of Hysteresis Motors Using Matlab/SimulinkDocument4 pagesInvestigation of The Dynamic Performance of Hysteresis Motors Using Matlab/SimulinkmakroumNo ratings yet
- Help - Synchronous Machine - Blocks (SimPowerSystems™)Document14 pagesHelp - Synchronous Machine - Blocks (SimPowerSystems™)Luis AguirreNo ratings yet
- Faculteit Der Elektrotechniek: Modelling and Identification of Single-And Double-Cage Induction MachinesDocument144 pagesFaculteit Der Elektrotechniek: Modelling and Identification of Single-And Double-Cage Induction MachinesAmatek Teekay 特克纳No ratings yet
- IEEE PES 12plsdfa20mcmsamDocument7 pagesIEEE PES 12plsdfa20mcmsamParameswararao BillaNo ratings yet
- DSP Control of Stepper MotorDocument5 pagesDSP Control of Stepper MotorAhmedHyderMohdNo ratings yet
- Dynamic Motor Parameter Identification For High Speed Flux Weakening Operation of Brushless Permanent Magnet Synchronous MachinesDocument7 pagesDynamic Motor Parameter Identification For High Speed Flux Weakening Operation of Brushless Permanent Magnet Synchronous Machineslilasaid2010No ratings yet
- Simulation of IEEE First Benchmark Model For SSR StudiesDocument4 pagesSimulation of IEEE First Benchmark Model For SSR StudiesPabloNalogowskiNo ratings yet
- Identification of The Machine Parameters IN Vector Controlled Induction Motor DriveDocument6 pagesIdentification of The Machine Parameters IN Vector Controlled Induction Motor DriveBelkacem BerrehailNo ratings yet
- Synchronous MachineDocument51 pagesSynchronous MachineahmmsayemNo ratings yet
- Modelling of A Large Synchronous Generator and Computation of The Auto Reclosing Timing of The Circuit Breaker For Its Transient StabilityDocument23 pagesModelling of A Large Synchronous Generator and Computation of The Auto Reclosing Timing of The Circuit Breaker For Its Transient StabilityAnonymous zzMfpoBxNo ratings yet
- Generalized Dynamic and Steady State Analysis of Self Excited Induction (SEIG)Document6 pagesGeneralized Dynamic and Steady State Analysis of Self Excited Induction (SEIG)harisimpNo ratings yet
- IEEE Transactions On Conversion, Vol. 8, No. 1, 1993Document7 pagesIEEE Transactions On Conversion, Vol. 8, No. 1, 1993doud98No ratings yet
- 2 Symposium On Lift and Escalator TechnologiesDocument12 pages2 Symposium On Lift and Escalator TechnologiesfreddyjoertyNo ratings yet
- Efficiency Aspects of Vector Control Applied To Synchronous Reluctance MotorsDocument7 pagesEfficiency Aspects of Vector Control Applied To Synchronous Reluctance MotorsNeeraj GahlainNo ratings yet
- Traction Induction Drive For Railway CHUEV DenisDocument9 pagesTraction Induction Drive For Railway CHUEV DenisPABLO MAURONo ratings yet
- Simulation of Synchronous Machine in Stability Study For Power SystemDocument6 pagesSimulation of Synchronous Machine in Stability Study For Power SystemZawmin TunNo ratings yet
- 138152101-Mt-Machine Modelling and AnalysisDocument2 pages138152101-Mt-Machine Modelling and AnalysisPalaparthy Venkata MaheshNo ratings yet
- Implement Five-Phase Permanent Magnet Synchronous Motor Vector Control Drive - SimulinkDocument11 pagesImplement Five-Phase Permanent Magnet Synchronous Motor Vector Control Drive - Simulinkrrdpereira100% (1)
- IJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchDocument5 pagesIJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchInternational Journal of computational Engineering research (IJCER)No ratings yet
- Induction MatlabDocument12 pagesInduction Matlabgrido002No ratings yet
- The Dynamic Response of A Linear Brushless D.C. S. MoghaniDocument4 pagesThe Dynamic Response of A Linear Brushless D.C. S. Moghaniflorin91No ratings yet
- Labview Simulation of Induction Motors: Zhaoxian Zhou and James Matthew JohnsonDocument8 pagesLabview Simulation of Induction Motors: Zhaoxian Zhou and James Matthew JohnsonR Sathish Kumar KumarNo ratings yet
- Dynamic Modeling and Simulation of A 3-HP Asynchronous Motor Driving A Mechanical LoadDocument6 pagesDynamic Modeling and Simulation of A 3-HP Asynchronous Motor Driving A Mechanical LoadpablitoNo ratings yet
- Simulation Modelling Practice and Theory: Abdallah Barakat, Slim Tnani, Gérard Champenois, Emile MouniDocument15 pagesSimulation Modelling Practice and Theory: Abdallah Barakat, Slim Tnani, Gérard Champenois, Emile Mounigurunathan14No ratings yet
- 10 Chapter 4 MM StabilityDocument5 pages10 Chapter 4 MM Stabilityashwin_05_kumarNo ratings yet
- Archive of SID: Performance Analysis of A Cost Effective 4-Switch 3-Phase Inverter Fed IM DriveDocument6 pagesArchive of SID: Performance Analysis of A Cost Effective 4-Switch 3-Phase Inverter Fed IM DrivePranav VyasNo ratings yet
- Modelare Si ControlDocument4 pagesModelare Si ControlDobai SzilardNo ratings yet
- Phase Current Control of A Two Phase Synchronous Reluctance MachineDocument7 pagesPhase Current Control of A Two Phase Synchronous Reluctance MachineapacheNo ratings yet
- DSP-Based Experimental Rig With The Doubly-Fed Induction Generator ForDocument12 pagesDSP-Based Experimental Rig With The Doubly-Fed Induction Generator Fordebasis250No ratings yet
- Modeling and Simulation of Reluctance Motor Using Digital ComputerDocument5 pagesModeling and Simulation of Reluctance Motor Using Digital ComputerroyourboatNo ratings yet
- Condition Monitoring and Fault Diagnosis of Induction MotorDocument4 pagesCondition Monitoring and Fault Diagnosis of Induction MotorFelix RiestraNo ratings yet
- Direct Torque Control of Induction Motor Using Artificial Neural NetworkDocument7 pagesDirect Torque Control of Induction Motor Using Artificial Neural NetworkMohamed SomaiNo ratings yet
- Experiment No:-09 Dt-09.02.2019 Aim of The ExperimentDocument23 pagesExperiment No:-09 Dt-09.02.2019 Aim of The ExperimentPrasant Kumar sahooNo ratings yet
- Modeling and Simulation of PermanentDocument83 pagesModeling and Simulation of PermanentSriram Anil Kumar GandhamNo ratings yet
- Simulation of Six Phase Permanent Magnet Synchronous Generator in MATLABDocument5 pagesSimulation of Six Phase Permanent Magnet Synchronous Generator in MATLABجمال ضيفيNo ratings yet
- Vector Control Simulation of AC MotorDocument16 pagesVector Control Simulation of AC MotorJosedocampocastro100% (1)
- Sensorless Control of 5 Phase BLCD MotorDocument6 pagesSensorless Control of 5 Phase BLCD Motorschlemihl69No ratings yet
- Trapezoidal Control of BLDC Motors Using Hall Effect SensorsDocument33 pagesTrapezoidal Control of BLDC Motors Using Hall Effect Sensorstoggle123No ratings yet
- Assignment 3Document2 pagesAssignment 3ni60No ratings yet
- Sliding Mode Observer For Torque Control in Sensorless BLDC MotorDocument5 pagesSliding Mode Observer For Torque Control in Sensorless BLDC MotorIOSRjournalNo ratings yet
- CS7Document8 pagesCS7zubairashrafNo ratings yet
- Simulation of Closed Loop Control of Buck Converter Fed DC Motor DriveDocument4 pagesSimulation of Closed Loop Control of Buck Converter Fed DC Motor DriveIJSTENo ratings yet
- Permanent Magnet Synchronous Motor ControlDocument3 pagesPermanent Magnet Synchronous Motor ControlMarcin KowalskiNo ratings yet
- D.C control matlab روكانDocument17 pagesD.C control matlab روكانMustafa AlhumayreNo ratings yet
- Three-Phase Induction MotorDocument10 pagesThree-Phase Induction MotorMadarwi SarwaNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Modular Multilevel Converter Control Strategy Based On Arm Current Control Under Unbalanced Grid ConditionDocument10 pagesModular Multilevel Converter Control Strategy Based On Arm Current Control Under Unbalanced Grid ConditionIrfan AliNo ratings yet
- 3 - D Printer LabDocument1 page3 - D Printer LabIrfan AliNo ratings yet
- Certificate in Recitation of Quran - QiratDocument2 pagesCertificate in Recitation of Quran - QiratIrfan AliNo ratings yet
- Belec 12islamicperspective 150202141131 Conversion Gate02Document98 pagesBelec 12islamicperspective 150202141131 Conversion Gate02Irfan AliNo ratings yet
- AMU Guide Adm 2017 18Document144 pagesAMU Guide Adm 2017 18munibfazalNo ratings yet
- Mechatronics LabDocument1 pageMechatronics LabIrfan AliNo ratings yet
- Trends in Active Power Line Conditioners: Electrical Engineering FieldsDocument7 pagesTrends in Active Power Line Conditioners: Electrical Engineering FieldsIrfan AliNo ratings yet
- Faculty of Theology B.A. (Hons.) Theology: 1. English LanguageDocument1 pageFaculty of Theology B.A. (Hons.) Theology: 1. English LanguageIrfan AliNo ratings yet
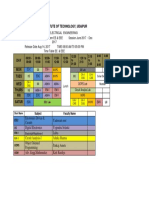
- V Sem EE & EEEDocument2 pagesV Sem EE & EEEIrfan AliNo ratings yet
- My Personal Time Table (23.08.2017)Document1 pageMy Personal Time Table (23.08.2017)Irfan AliNo ratings yet
- Faculty of Theology: B. A. (Hons.)Document3 pagesFaculty of Theology: B. A. (Hons.)Irfan AliNo ratings yet
- Physics LabDocument1 pagePhysics LabIrfan AliNo ratings yet
- 6ec1 6ec2 6ec3 6ec4 6ec5 6ec6.2Document1 page6ec1 6ec2 6ec3 6ec4 6ec5 6ec6.2Irfan AliNo ratings yet
- III Sem ECE Time Table 19-8-2017 (T)Document1 pageIII Sem ECE Time Table 19-8-2017 (T)Irfan AliNo ratings yet
- Absent Students PDFDocument1 pageAbsent Students PDFIrfan AliNo ratings yet
- III Sem EE & EEEDocument1 pageIII Sem EE & EEEIrfan AliNo ratings yet
- I Sem Faculty Time Table 2017-18Document6 pagesI Sem Faculty Time Table 2017-18Irfan AliNo ratings yet
- Techno India NJR Institute of Technology, Udaipur: DAY MON Tues WED Thurs FRI SaturDocument1 pageTechno India NJR Institute of Technology, Udaipur: DAY MON Tues WED Thurs FRI SaturIrfan AliNo ratings yet
- IoT Course OutlineDocument8 pagesIoT Course OutlineIrfan Ali100% (1)
- Time-Table: B. Tech. - I SEM Section-A (CE + ME)Document3 pagesTime-Table: B. Tech. - I SEM Section-A (CE + ME)Irfan AliNo ratings yet
- Bosch Selected-Facebook UpdateDocument4 pagesBosch Selected-Facebook UpdateIrfan AliNo ratings yet
- Techno India NJR Institute of Technology, UdaipurDocument1 pageTechno India NJR Institute of Technology, UdaipurIrfan AliNo ratings yet
- List of Students (Ee/Eee) Who Were Absent Today in Matlab TrainingDocument1 pageList of Students (Ee/Eee) Who Were Absent Today in Matlab TrainingIrfan AliNo ratings yet
- IoT Course OutlineDocument8 pagesIoT Course OutlineIrfan Ali100% (1)
- Intel HacksDocument1 pageIntel HacksIrfan AliNo ratings yet
- Intel HacksDocument1 pageIntel HacksIrfan AliNo ratings yet
- Midterm Exam Schedule For 2nd Year & 3rd Year ECEDocument1 pageMidterm Exam Schedule For 2nd Year & 3rd Year ECEIrfan AliNo ratings yet
- VirtualDocument1 pageVirtualIrfan AliNo ratings yet
- Lake MonitoringDocument1 pageLake MonitoringIrfan AliNo ratings yet
- Lake MonitoringDocument1 pageLake MonitoringIrfan AliNo ratings yet
- Lecs 2 After MidtermDocument41 pagesLecs 2 After MidtermAbdalkader Alibrahim100% (1)
- FRENIC4600FM5e: Fuji Medium-Voltage IGBT InvertersDocument11 pagesFRENIC4600FM5e: Fuji Medium-Voltage IGBT InverterssenthilkannaiyahNo ratings yet
- High Frequency Link Inverters and Multiresonant ControllersDocument192 pagesHigh Frequency Link Inverters and Multiresonant ControllerssaichanNo ratings yet
- Portable Meter Test BenchDocument15 pagesPortable Meter Test BenchMekkov MekkovvNo ratings yet
- Lecture EEE 447 Chap 1 IntroductionDocument22 pagesLecture EEE 447 Chap 1 IntroductionMd. Anisur RahmanNo ratings yet
- varlogicNRC12 UserManualDocument56 pagesvarlogicNRC12 UserManualRonald H SantosNo ratings yet
- Power Quality Problems PDFDocument13 pagesPower Quality Problems PDFAna Caroline Soares De PaulaNo ratings yet
- HVDC Question BankDocument4 pagesHVDC Question Banksabarish0801No ratings yet
- Design Improvements in IGBT Based Variable Frequency Drive MotorsDocument7 pagesDesign Improvements in IGBT Based Variable Frequency Drive MotorsChris ParkinsonNo ratings yet
- ME96NSR Power MeterDocument11 pagesME96NSR Power MeterAndrew MaverickNo ratings yet
- Harmonics and Wind POwerDocument22 pagesHarmonics and Wind POwercphcricriNo ratings yet
- 3ADW000196R0101 DCS800 12-Pulse Manual e ADocument96 pages3ADW000196R0101 DCS800 12-Pulse Manual e ADeepak Jain100% (1)
- AFE - Active Front EndDocument121 pagesAFE - Active Front EndrodrigomessiasNo ratings yet
- Gunasekar Ramesh-External 2023.01.21 10:09:29 +05'30'Document106 pagesGunasekar Ramesh-External 2023.01.21 10:09:29 +05'30'Satish KumarNo ratings yet
- Energy Management SystemDocument32 pagesEnergy Management SystemBenediktus Tri Aprianto100% (1)
- Power Balance and Choice of Power Supply Solutions PDFDocument88 pagesPower Balance and Choice of Power Supply Solutions PDFajayi micheal sundayNo ratings yet
- Pm130 Plus ProfibusDocument32 pagesPm130 Plus ProfibusAnonymous m65TTcfOTNo ratings yet
- As 62053.21-2005 Electricity Metering Equipment (AC) - Particular Requirements Static Meters For Active EnergDocument10 pagesAs 62053.21-2005 Electricity Metering Equipment (AC) - Particular Requirements Static Meters For Active EnergSAI Global - APACNo ratings yet
- Instr p1652606 1 231229 161548Document55 pagesInstr p1652606 1 231229 161548MigueliñoNo ratings yet
- Extending The Life of PF CapacitorsDocument9 pagesExtending The Life of PF CapacitorsB K SinhaNo ratings yet
- PHD Jun Bum Kwon E PDF PDFDocument172 pagesPHD Jun Bum Kwon E PDF PDFRafik CherniNo ratings yet
- Power Inductors Engl 03-08Document12 pagesPower Inductors Engl 03-08Bernard OdipoNo ratings yet
- Whitepaper Switching of Filter Circuits With Vacuum SwitchesDocument8 pagesWhitepaper Switching of Filter Circuits With Vacuum Switchesvijayeee82No ratings yet
- ISKRA Letak MC3xx 2016 Ver.4.0 2016.compressedDocument6 pagesISKRA Letak MC3xx 2016 Ver.4.0 2016.compressedmelanitisNo ratings yet