You might also like
- Data Encapsulatio N and Ipv4: Month - YearDocument35 pagesData Encapsulatio N and Ipv4: Month - YearCat SmithNo ratings yet
- Modbus TCP TrainingDocument45 pagesModbus TCP TrainingVishnu Lal100% (1)
- Tracker Protocol V1.3Document24 pagesTracker Protocol V1.3zahraa.shokohiNo ratings yet
- Read Me Slave 2.1Document7 pagesRead Me Slave 2.1Prasad VylaleNo ratings yet
- ME440 Handheld Power Analyzer Modbus Tcp/Ip Communication ProtocolDocument21 pagesME440 Handheld Power Analyzer Modbus Tcp/Ip Communication ProtocolLuis GonzalezNo ratings yet
- Dkg-527 Automatic Mains Failure Unit Modbus Application ManualDocument11 pagesDkg-527 Automatic Mains Failure Unit Modbus Application Manualjose luis SerraNo ratings yet
- IP HeaderDocument4 pagesIP HeaderNio Zi FengNo ratings yet
- Protocol Max v4: Third Party InterfaceDocument16 pagesProtocol Max v4: Third Party InterfaceHugo LoureiroNo ratings yet
- Packet Formats To RememberDocument18 pagesPacket Formats To RememberVansh MalikNo ratings yet
- COD Modbus InstructionDocument18 pagesCOD Modbus InstructionkepyarNo ratings yet
- Caterpillar CCM m50Document4 pagesCaterpillar CCM m50vicky khanNo ratings yet
- Lect26 - ICMPDocument15 pagesLect26 - ICMPhanhNo ratings yet
- Lecture 6 Computer NetworkDocument53 pagesLecture 6 Computer NetworkHamidx NxtNo ratings yet
- Detailed Description of The Modbus TCP Protocol With Command ExamplesDocument12 pagesDetailed Description of The Modbus TCP Protocol With Command ExamplesvaibhavNo ratings yet
- 42.Milesight-Troubleshooting-Integration Between LPR Camera and NVR (VMS)Document12 pages42.Milesight-Troubleshooting-Integration Between LPR Camera and NVR (VMS)jesus sanchezNo ratings yet
- GASTAT-700 Interface Protcol V1.06 - 180115Document21 pagesGASTAT-700 Interface Protcol V1.06 - 180115MatrixNo ratings yet
- Icmp An Ethernet Frame: IP PacketDocument4 pagesIcmp An Ethernet Frame: IP PacketSHA EricNo ratings yet
- Operation Manual Modbus MasterDocument17 pagesOperation Manual Modbus MasterMiguel PozoNo ratings yet
- DC8xD MODBUS - Communication Protocol - V1.0-20210710Document14 pagesDC8xD MODBUS - Communication Protocol - V1.0-20210710iceman1983No ratings yet
- SI-MAG110 ModBus Ptotocol ManualDocument12 pagesSI-MAG110 ModBus Ptotocol ManualSatya BarikNo ratings yet
- PH 1.5-Modbus InstructionDocument20 pagesPH 1.5-Modbus InstructionkepyarNo ratings yet
- History: Ping Is ADocument13 pagesHistory: Ping Is ALudwig McwillsNo ratings yet
- Modbus and Modbus TCPDocument45 pagesModbus and Modbus TCPmohammedansin1No ratings yet
- IPR-A Communication Protocol GB V1.7Document14 pagesIPR-A Communication Protocol GB V1.7Seba Vásquez Von MulsowNo ratings yet
- API Codec Quick Start Guide - NCD - IoDocument16 pagesAPI Codec Quick Start Guide - NCD - IoGeorge RickmanNo ratings yet
- XNC Modbus MasterDocument12 pagesXNC Modbus Masterjgr77No ratings yet
- BA TIN-Profibus DP Schnittstelle-Vistus-en E 20180920 AKaDocument9 pagesBA TIN-Profibus DP Schnittstelle-Vistus-en E 20180920 AKaPaulo ViníciusNo ratings yet
- Modbus-Rtu For Expert: PLUSR200Document22 pagesModbus-Rtu For Expert: PLUSR200Iker BasqueadventureNo ratings yet
- Chapter 1,2,3 NotesDocument35 pagesChapter 1,2,3 NotesGroup ThreeNo ratings yet
- DKG-309 / 319 / 507-J / 517-J / 527 / 537 DKG-543 / 547 / 553 / 557 Modbus Application ManualDocument12 pagesDKG-309 / 319 / 507-J / 517-J / 527 / 537 DKG-543 / 547 / 553 / 557 Modbus Application Manualjose luis SerraNo ratings yet
- 4G50Z04721P1 05Document16 pages4G50Z04721P1 05Suriansyah AbdullahNo ratings yet
- TCP / IP SuiteDocument10 pagesTCP / IP SuiteczwrcdNo ratings yet
- Self Cleaning NH4 N Modbus Instruction enDocument21 pagesSelf Cleaning NH4 N Modbus Instruction enkepyarNo ratings yet
- TcpprotocolDocument54 pagesTcpprotocolr ogNo ratings yet
- Scsi CommandDocument42 pagesScsi CommandKathar BashaNo ratings yet
- KO95 MappingDocument18 pagesKO95 MappingNovan WPNo ratings yet
- Kostal Interface Modbus (TCP) & Sunspec: Piko Iq / Plenticore PlusDocument21 pagesKostal Interface Modbus (TCP) & Sunspec: Piko Iq / Plenticore PlusKharisma MuhammadNo ratings yet
- VW Transport Protocol 2.0 (TP 2.0) For CAN BusDocument8 pagesVW Transport Protocol 2.0 (TP 2.0) For CAN Busulisse_No ratings yet
- Ipv6 Tcp/Ip and Tcpdump: Dns Routing Header (Similar To Ipv4 LSRR and RR Options) Options HeadersDocument2 pagesIpv6 Tcp/Ip and Tcpdump: Dns Routing Header (Similar To Ipv4 LSRR and RR Options) Options HeaderspvsairamNo ratings yet
- Micom P740: Numerical Busbar ProtectionDocument60 pagesMicom P740: Numerical Busbar ProtectionZokiNo ratings yet
- Computer Peripherals: School of Computer Engineering Nanyang Technological University SingaporeDocument21 pagesComputer Peripherals: School of Computer Engineering Nanyang Technological University Singaporeshriram1082883No ratings yet
- Serial PortDocument31 pagesSerial Porttariq7868100% (2)
- An Introduction To Serial Port InterfacingDocument31 pagesAn Introduction To Serial Port InterfacingVeerendra SimplyMeNo ratings yet
- 12 Remote Control: !!!WARNING!!!Document6 pages12 Remote Control: !!!WARNING!!!Lucía jandigNo ratings yet
- CoAP Protocol CoADocument12 pagesCoAP Protocol CoADevaNo ratings yet
- DSP 5050Document5 pagesDSP 5050Iván GonzálezNo ratings yet
- Modbus RTU - ASCII Master Manual 8 - Simply Modbus SoftwareDocument11 pagesModbus RTU - ASCII Master Manual 8 - Simply Modbus SoftwareSaber LeffiNo ratings yet
- IOServer OPC Server TagsDocument3 pagesIOServer OPC Server TagsMochamad EffendiNo ratings yet
- 12 - NuMicro VCOMDocument25 pages12 - NuMicro VCOMThienNo ratings yet
- Vag TP 2.0Document4 pagesVag TP 2.0Benito CamelaNo ratings yet
- IP (Internet Protocol) : Offered Services Packet Format IcmpDocument49 pagesIP (Internet Protocol) : Offered Services Packet Format IcmpMonikaNo ratings yet
- PT 1 Acn QBDocument48 pagesPT 1 Acn QBdeex arnoldNo ratings yet
- SOFARSOLAR ModBus-RTU Communication ProtocolDocument22 pagesSOFARSOLAR ModBus-RTU Communication ProtocolВячеслав ЛарионовNo ratings yet
- CPU-Z HTML Report FileDocument14 pagesCPU-Z HTML Report FileEduardo ValençaNo ratings yet
- Modbus RTU - ASCII Slave Manual 8 - Simply Modbus SoftwareDocument11 pagesModbus RTU - ASCII Slave Manual 8 - Simply Modbus Softwaresaberleffi1No ratings yet
- Ping (Networking Utility) : GroperDocument5 pagesPing (Networking Utility) : GroperCristian StoicaNo ratings yet
- CAN Protocol ENDocument7 pagesCAN Protocol ENing.ettoreNo ratings yet
- 5.0 Network LayerDocument48 pages5.0 Network LayerteweldetekesteNo ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- +5V-Powered, Multichannel RS-232 Drivers/Receivers: MAX220-MAX249 MAX220-MAX249Document38 pages+5V-Powered, Multichannel RS-232 Drivers/Receivers: MAX220-MAX249 MAX220-MAX249Cesar Ruben SosaNo ratings yet
- Tutorial - GPS To Google EarthDocument18 pagesTutorial - GPS To Google EarthRaid ParisacaNo ratings yet
- Tutorial - GPS To Google EarthDocument18 pagesTutorial - GPS To Google EarthRaid ParisacaNo ratings yet
- 1268 RevCDocument3 pages1268 RevCrk_kamatchi3483No ratings yet
- Generic With Curtis 1268 5403 Control PDFDocument6 pagesGeneric With Curtis 1268 5403 Control PDFaminNo ratings yet
- 1268 Manual (12D) PDFDocument66 pages1268 Manual (12D) PDFmbgprsmsNo ratings yet
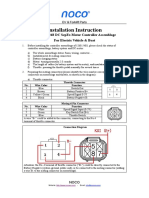
- Installation Instruction: Curtis 1268 DC Sepex Motor Controller Assemblage For Electric Vehicle & BoatDocument3 pagesInstallation Instruction: Curtis 1268 DC Sepex Motor Controller Assemblage For Electric Vehicle & BoatCesar Ruben SosaNo ratings yet
- Manual de DioderaDocument64 pagesManual de DioderaPatrick Pastaz100% (1)
- Installing 38Mt & 39Mt Gear Reduction Heavy Duty Starting MotorsDocument2 pagesInstalling 38Mt & 39Mt Gear Reduction Heavy Duty Starting MotorsCesar Ruben SosaNo ratings yet
- Model: THG1374YMS: Technical Data SheetDocument1 pageModel: THG1374YMS: Technical Data SheetCesar Ruben SosaNo ratings yet
- CacheplanoDocument12 pagesCacheplanoCesar Ruben SosaNo ratings yet
- Manual Gps TK 103 B EnglishDocument33 pagesManual Gps TK 103 B EnglishGustavito Down WorldorderNo ratings yet
- Coventry Log Homes: Foundation PlanDocument3 pagesCoventry Log Homes: Foundation PlanCesar Ruben SosaNo ratings yet
- 00000018Document70 pages00000018Mario MarambioNo ratings yet
- Manual de DioderaDocument64 pagesManual de DioderaPatrick Pastaz100% (1)
- Catalogo PDFDocument646 pagesCatalogo PDFCesar Ruben Sosa100% (1)
- Lathe ThreadingDocument3 pagesLathe ThreadingCesar Ruben SosaNo ratings yet
- Brand New Replacement Alternators For Trucks & Buses Bosch NCB2 ApplicationsDocument15 pagesBrand New Replacement Alternators For Trucks & Buses Bosch NCB2 ApplicationsCesar Ruben SosaNo ratings yet
- Electrical Components Catalogue - (Parts) - 20160617 PDFDocument554 pagesElectrical Components Catalogue - (Parts) - 20160617 PDFCesar Ruben SosaNo ratings yet
- HydraulicPowerUnit PowerTransmissionDocument4 pagesHydraulicPowerUnit PowerTransmissionCesar Ruben SosaNo ratings yet
- SOME Catalogo ArranquesDocument91 pagesSOME Catalogo ArranquesCesar Ruben SosaNo ratings yet
- Installing Vtiger On GodaddyDocument11 pagesInstalling Vtiger On GodaddyAlejandro HernandezNo ratings yet
- Summary EES Manual PDFDocument13 pagesSummary EES Manual PDFgir_hpNo ratings yet
- MOTOTRBO™ XiR M8600i SERIES DIGITAL TWO-WAY RADIOSDocument4 pagesMOTOTRBO™ XiR M8600i SERIES DIGITAL TWO-WAY RADIOSHerman GunawanNo ratings yet
- CORView Lite User Guide - 1506672UDocument129 pagesCORView Lite User Guide - 1506672UFrancisco RodríguezNo ratings yet
- Applicom: Protocol ManualDocument29 pagesApplicom: Protocol Manualalberto murguiaNo ratings yet
- Image Quality Assessment For Fake Biometric Detection: Application To Face and Fingerprint RecognitionDocument4 pagesImage Quality Assessment For Fake Biometric Detection: Application To Face and Fingerprint RecognitionijeteeditorNo ratings yet
- Sound Card - Emagic A 62 enDocument84 pagesSound Card - Emagic A 62 enLudwig SchmidtNo ratings yet
- Classification of Client Server SystemDocument3 pagesClassification of Client Server SystemKavisha PatelNo ratings yet
- PSC Lecturer in Computer Science Solved Question Paper 2015Document12 pagesPSC Lecturer in Computer Science Solved Question Paper 2015anishsukumar000gmailcomNo ratings yet
- Quarter 2 - Module 2 What I Know: Enhancement Exercise 1Document5 pagesQuarter 2 - Module 2 What I Know: Enhancement Exercise 1JohnNo ratings yet
- Sas Sata Verification Script Engine ManualDocument158 pagesSas Sata Verification Script Engine ManualztxNo ratings yet
- Ch17 Ownership and PermissionsDocument19 pagesCh17 Ownership and PermissionshasbikizklNo ratings yet
- CoreDocument1,090 pagesCoreMuhammad Khurram Adeel0% (1)
- What Is Sap LSMWDocument13 pagesWhat Is Sap LSMWVinay PavanNo ratings yet
- T4T 11 - Making The Most of MOOCs PSGNDocument3 pagesT4T 11 - Making The Most of MOOCs PSGNSobbooh Fatima GS AdminNo ratings yet
- D80149GC20 sg2Document322 pagesD80149GC20 sg2Seigneuret MIEHAKANDA100% (1)
- Welcome To Module 2: Understanding VirtualizationDocument8 pagesWelcome To Module 2: Understanding VirtualizationӨ. ГансүхNo ratings yet
- ICT InstallationDocument34 pagesICT InstallationDionisia L. PugongNo ratings yet
- Based On Principles of OperationDocument11 pagesBased On Principles of OperationannusainiNo ratings yet
- Operating Manual (Deh-8350sd) - Eng - Esp - Por PDFDocument104 pagesOperating Manual (Deh-8350sd) - Eng - Esp - Por PDFHenrique BiesdorfNo ratings yet
- Penetration Testing Report: Production Web ServerDocument35 pagesPenetration Testing Report: Production Web ServerAbraham AmselNo ratings yet
- Prakash R 4 Yrs Nokia ChennaiDocument2 pagesPrakash R 4 Yrs Nokia ChennaiPatel PrashantNo ratings yet
- SCCM Log File DescriptionDocument2 pagesSCCM Log File DescriptionjankowskijasNo ratings yet
- Release Notes - BUSY 18: DisclaimerDocument8 pagesRelease Notes - BUSY 18: Disclaimerjatin guptaNo ratings yet
- Product Information DIGSI5 V06.20Document48 pagesProduct Information DIGSI5 V06.20feromagnetizamNo ratings yet
- Gis and Gps Based Preliminary Distribution System PlanningDocument6 pagesGis and Gps Based Preliminary Distribution System Planningpd110382No ratings yet
- How To: Export Data From MS Access Database, Automatic, No Mouse Clicks!Document3 pagesHow To: Export Data From MS Access Database, Automatic, No Mouse Clicks!mizan70_954926161No ratings yet
- Debug 1214Document3 pagesDebug 1214Theo Chairul TheGunnersNo ratings yet
- CIS775: Computer Architecture: Chapter 1: Fundamentals of Computer DesignDocument43 pagesCIS775: Computer Architecture: Chapter 1: Fundamentals of Computer DesignSwapnil Sunil ShendageNo ratings yet
- ATSDocument10 pagesATSCong TranNo ratings yet