You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Construction Schedule Template 07Document7 pagesConstruction Schedule Template 07MIRCEA1305No ratings yet
- Flypcbus PDFDocument8 pagesFlypcbus PDFMIRCEA1305No ratings yet
- The Roots of Unfairness: The Black Swan in Arts and LiteratureDocument7 pagesThe Roots of Unfairness: The Black Swan in Arts and LiteratureAlfian 'aaL' EikmanNo ratings yet
- FieldbusDocument20 pagesFieldbusMIRCEA1305No ratings yet
- BriberyDocument3 pagesBriberyMIRCEA1305No ratings yet
- Complete Steel Detailing Manual by Expert AISC Steel DetailersDocument2 pagesComplete Steel Detailing Manual by Expert AISC Steel DetailersMIRCEA1305No ratings yet
- Construction Schedule Template 06Document2 pagesConstruction Schedule Template 06MIRCEA1305No ratings yet
- Learn From Bobby Fischer Excerpt PDFDocument0 pagesLearn From Bobby Fischer Excerpt PDFFernando YamamotoNo ratings yet
- Boron Steel 1Document7 pagesBoron Steel 1RajanikantJadhavNo ratings yet
- Airside Driving Permit Final AVOP ENWIA BBDocument56 pagesAirside Driving Permit Final AVOP ENWIA BBMIRCEA1305No ratings yet
- Oil Sands Millennium ProjectDocument9 pagesOil Sands Millennium ProjectMIRCEA1305No ratings yet
- Anamorphic ArtDocument0 pagesAnamorphic ArtvimizNo ratings yet
- Boron Steel 1Document7 pagesBoron Steel 1RajanikantJadhavNo ratings yet
- Bray Yacht Design and Research Ltd. - The Advantages of Twin KeelsDocument6 pagesBray Yacht Design and Research Ltd. - The Advantages of Twin KeelsMIRCEA1305No ratings yet
- B D S - F 2004: Ridge Esign Pecifications EbruaryDocument20 pagesB D S - F 2004: Ridge Esign Pecifications EbruaryMIRCEA1305No ratings yet
- The Probability of Collisions With EarthDocument6 pagesThe Probability of Collisions With EarthMIRCEA1305No ratings yet
- Birth Order and Personality PDFDocument23 pagesBirth Order and Personality PDFMIRCEA1305No ratings yet
- 2 Way Radio GuideDocument13 pages2 Way Radio GuideMIRCEA1305No ratings yet
- Oil Sands Millennium ProjectDocument9 pagesOil Sands Millennium ProjectMIRCEA1305No ratings yet
- On Track - Summer 2015Document6 pagesOn Track - Summer 2015MIRCEA1305No ratings yet
- Sheet MetalDocument23 pagesSheet Metalvenkatesh07590% (21)
- Advantages of AdeptDocument11 pagesAdvantages of AdeptMIRCEA1305No ratings yet
- The Solution To Configure Products and Processes: RuledesignerDocument8 pagesThe Solution To Configure Products and Processes: RuledesignerMIRCEA1305No ratings yet
- Airside Driving Permit Final AVOP ENWIA BBDocument56 pagesAirside Driving Permit Final AVOP ENWIA BBMIRCEA1305No ratings yet
- Baluns and Why We Need ThemDocument6 pagesBaluns and Why We Need ThemMIRCEA1305No ratings yet
- Scuba Emergencies Per Lesson 40Document6 pagesScuba Emergencies Per Lesson 40MIRCEA1305No ratings yet
- AhcDocument3 pagesAhcImam Bukhori100% (1)
- Sheet MetalDocument23 pagesSheet Metalvenkatesh07590% (21)
- Paper 1 Page3-10 PDFDocument8 pagesPaper 1 Page3-10 PDFMuhammad HaidiNo ratings yet
- As Management Tools Settings 2015 enDocument81 pagesAs Management Tools Settings 2015 enMIRCEA1305No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Healthymagination at Ge Healthcare SystemsDocument5 pagesHealthymagination at Ge Healthcare SystemsPrashant Pratap Singh100% (1)
- GCP Vol 2 PDF (2022 Edition)Document548 pagesGCP Vol 2 PDF (2022 Edition)Sergio AlvaradoNo ratings yet
- Liquitex Soft Body BookletDocument12 pagesLiquitex Soft Body Booklethello belloNo ratings yet
- Newsletter 1-2021 Nordic-Baltic RegionDocument30 pagesNewsletter 1-2021 Nordic-Baltic Regionapi-206643591100% (1)
- International Freight 01Document5 pagesInternational Freight 01mature.ones1043No ratings yet
- Twin PregnancyDocument73 pagesTwin Pregnancykrishna mandalNo ratings yet
- 4B - Urp - Shavya's FarmDocument22 pages4B - Urp - Shavya's FarmSnehansh KishoreNo ratings yet
- Literature Review of Service Quality in RestaurantsDocument7 pagesLiterature Review of Service Quality in RestaurantsuifjzvrifNo ratings yet
- IQAc 04-05Document10 pagesIQAc 04-05ymcacollegewebsiteNo ratings yet
- Bossypants Autobiography and Womens SelvesDocument26 pagesBossypants Autobiography and Womens SelvesCamila Paz GutiérrezNo ratings yet
- Advocacy Firm Business Plan by SlidesgoDocument40 pagesAdvocacy Firm Business Plan by SlidesgoirinaNo ratings yet
- Song LyricsDocument13 pagesSong LyricsCyh RusNo ratings yet
- Bioinformatics Computing II: MotivationDocument7 pagesBioinformatics Computing II: MotivationTasmia SaleemNo ratings yet
- The Time Machine Was First Published in 1984 As A Story Under The Name The Time Traveller in The National ObserverDocument1 pageThe Time Machine Was First Published in 1984 As A Story Under The Name The Time Traveller in The National ObservermarceNo ratings yet
- The Body Shop Case Analysis. The Challenges of Managing Business As Holistic ConfigurationDocument28 pagesThe Body Shop Case Analysis. The Challenges of Managing Business As Holistic ConfigurationHanna AbejoNo ratings yet
- Group 2 ITI Consensus Report: Prosthodontics and Implant DentistryDocument9 pagesGroup 2 ITI Consensus Report: Prosthodontics and Implant DentistryEsme ValenciaNo ratings yet
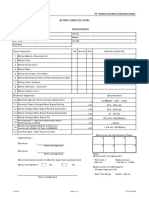
- Battery Checklist ProcedureDocument1 pageBattery Checklist ProcedureKrauser ChanelNo ratings yet
- BÀI TẬP LESSON 7. CÂU BỊ ĐỘNG 1Document4 pagesBÀI TẬP LESSON 7. CÂU BỊ ĐỘNG 1Yến Vy TrầnNo ratings yet
- Notice: Premerger Notification Waiting Periods Early TerminationsDocument5 pagesNotice: Premerger Notification Waiting Periods Early TerminationsJustia.comNo ratings yet
- 1.161000 702010 New Perspectives 2ndedDocument43 pages1.161000 702010 New Perspectives 2ndedbimobimoprabowoNo ratings yet
- A Case On Marketing Strategy of Xiaomi IndiaDocument39 pagesA Case On Marketing Strategy of Xiaomi IndiaSoumyajeet Rout0% (1)
- Extract The .Msi FilesDocument2 pagesExtract The .Msi FilesvladimirNo ratings yet
- Benjamin Franklin - The Indian Treaties (1938)Document450 pagesBenjamin Franklin - The Indian Treaties (1938)Spiritu SanctoNo ratings yet
- ETNOBotanica NombresDocument188 pagesETNOBotanica Nombresjalepa_esNo ratings yet
- Ancient Sumer Flip BookDocument9 pagesAncient Sumer Flip Bookapi-198624210No ratings yet
- CCDocument5 pagesCCnazmulNo ratings yet
- Priest, Graham - The Logic of The Catuskoti (2010)Document31 pagesPriest, Graham - The Logic of The Catuskoti (2010)Alan Ruiz100% (1)
- Muscles of The Dog 2: 2012 Martin Cake, Murdoch UniversityDocument11 pagesMuscles of The Dog 2: 2012 Martin Cake, Murdoch UniversityPiereNo ratings yet
- Backwards Design - Jessica W Maddison CDocument20 pagesBackwards Design - Jessica W Maddison Capi-451306299100% (1)
- Description and Operating Instructions: Multicharger 750 12V/40A 24V/20A 36V/15ADocument34 pagesDescription and Operating Instructions: Multicharger 750 12V/40A 24V/20A 36V/15APablo Barboza0% (1)