You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Fluid Mechanics Equation SheetDocument11 pagesFluid Mechanics Equation SheetJerone Manley0% (1)
- Nonlinear Static and Dynamic Analysis of Reinforced Concrete SubassemblagesDocument178 pagesNonlinear Static and Dynamic Analysis of Reinforced Concrete Subassemblageshamed_kouhestaniNo ratings yet
- Dynamic Design For AnchorsDocument44 pagesDynamic Design For AnchorshoustonhimselfNo ratings yet
- ABAQUS User SubroutineDocument18 pagesABAQUS User Subroutineknan1100% (1)
- 2011 - Evaluation of Drift Demands in Existing Steel Frames Under As-Recorded Far-Field PDFDocument14 pages2011 - Evaluation of Drift Demands in Existing Steel Frames Under As-Recorded Far-Field PDFhamed_kouhestaniNo ratings yet
- 2003 - The Effects of Repeated Earthquake Ground Motions On The Non-Linear Response of SDOF SystemsDocument18 pages2003 - The Effects of Repeated Earthquake Ground Motions On The Non-Linear Response of SDOF Systemshamed_kouhestaniNo ratings yet
- Error Estimation of Closed-Form Solution For Annual Rate of Structural CollapseDocument33 pagesError Estimation of Closed-Form Solution For Annual Rate of Structural Collapsehamed_kouhestaniNo ratings yet
- Seismic Collapse Safety - II - 27jul2010 - FinalDocument27 pagesSeismic Collapse Safety - II - 27jul2010 - Finalhamed_kouhestaniNo ratings yet
- Preliminary Study On The Fragility Curves For Steel Structures in TaipeiDocument8 pagesPreliminary Study On The Fragility Curves For Steel Structures in Taipeihamed_kouhestaniNo ratings yet
- New Method For The Design of Reinforced Concrete Moment Resisting Frames With Damage ControlDocument8 pagesNew Method For The Design of Reinforced Concrete Moment Resisting Frames With Damage Controlhamed_kouhestaniNo ratings yet
- Effects of Plastic Hinge Properties in Nonlinear Analysis of Reinforced Concrete BuildingsDocument9 pagesEffects of Plastic Hinge Properties in Nonlinear Analysis of Reinforced Concrete BuildingsJuan Carlos GonzálezNo ratings yet
- Nonlinear Static Analysis To Assess Seismic Performance and Vulnerability of Code - Conforming RC BuildingsDocument10 pagesNonlinear Static Analysis To Assess Seismic Performance and Vulnerability of Code - Conforming RC Buildingshamed_kouhestaniNo ratings yet
- Murmurs From The Vascular Members: A Generalized Theoretical OutlookDocument13 pagesMurmurs From The Vascular Members: A Generalized Theoretical OutlookAsian Journal of Basic Science & ResearchNo ratings yet
- Subject Name: Engineering Mechanics Module No:2 Module Name: Equilibrium of System of Coplanar ForcesDocument37 pagesSubject Name: Engineering Mechanics Module No:2 Module Name: Equilibrium of System of Coplanar ForcesSheetal KumarNo ratings yet
- Shear LagDocument13 pagesShear LagMhnd Al-SherrawiNo ratings yet
- Design and Analysis of Al-6081 T6 PistonDocument9 pagesDesign and Analysis of Al-6081 T6 PistonIJIRSTNo ratings yet
- Machine Design 1: - Theories of FailureDocument16 pagesMachine Design 1: - Theories of FailureGlenn Ray ErasmoNo ratings yet
- L9 Trajectory Planning 1 V1Document15 pagesL9 Trajectory Planning 1 V1shaheerdurraniNo ratings yet
- Magnetocaloric Effect A Review of The Thermodynamic CyclesDocument9 pagesMagnetocaloric Effect A Review of The Thermodynamic CyclesYangyangNo ratings yet
- 3.1 Dynamics (Scalars and Vectors, Pressure)Document4 pages3.1 Dynamics (Scalars and Vectors, Pressure)SalmanNo ratings yet
- Classical PhysicsDocument35 pagesClassical PhysicsAnonymous BPFIMnCdNo ratings yet
- Acta Biechanica: (Received July 4, 1984)Document23 pagesActa Biechanica: (Received July 4, 1984)Maiman LatoNo ratings yet
- I. Objectives:: Detailed Lesson Plan in Physics Grade 8Document5 pagesI. Objectives:: Detailed Lesson Plan in Physics Grade 8Phranxies Jean BlayaNo ratings yet
- Physics (Work and Energy) Class IXDocument3 pagesPhysics (Work and Energy) Class IXAditya SinhaNo ratings yet
- GGL Induksi: Eksperimen Faraday Fluks Magnetik Hukum Induksi Faraday GGL Gerakan Hukum LenzDocument28 pagesGGL Induksi: Eksperimen Faraday Fluks Magnetik Hukum Induksi Faraday GGL Gerakan Hukum LenzAgungSyukriadinataNo ratings yet
- 303 - Nov - 2016Document4 pages303 - Nov - 2016L. K JainNo ratings yet
- Rcp2Cr-Rt Rcp2W-Rt: Cleanroom Dust-proof/Splash-proofDocument16 pagesRcp2Cr-Rt Rcp2W-Rt: Cleanroom Dust-proof/Splash-proofhoangnuceNo ratings yet
- Lecture 7 Part 2 Strength of MaterialsااااااDocument18 pagesLecture 7 Part 2 Strength of Materialsااااااarno assassinNo ratings yet
- Plane Strain Mechanical Characteristics of Liquefied Cement-Treated Soil - Y. HayashiDocument6 pagesPlane Strain Mechanical Characteristics of Liquefied Cement-Treated Soil - Y. HayashiNguyen Quoc KhanhNo ratings yet
- Complementary Relativity - Beyond The Lorentz Transformations - Eng+ItaDocument39 pagesComplementary Relativity - Beyond The Lorentz Transformations - Eng+ItaLeonardo RubinoNo ratings yet
- Eccentric Beam Column Connections Ci 2004 138Document5 pagesEccentric Beam Column Connections Ci 2004 138kp21100% (2)
- 003 Tower Nonlinear Dynamic Response of Cable-Stayed Bridges Under Great Earthquake Ground MotionDocument4 pages003 Tower Nonlinear Dynamic Response of Cable-Stayed Bridges Under Great Earthquake Ground MotionjaswantNo ratings yet
- RPT Physics Form 4Document18 pagesRPT Physics Form 4Wong Teck KimNo ratings yet
- LO2 Structural Mechanical Prop Metals PDFDocument41 pagesLO2 Structural Mechanical Prop Metals PDFChelle VillasisNo ratings yet
- Electrical Parameters: MD Helalur Rahman Executive Engineer Titas 50 MW Power Plant BPDB, Titas, CumillaDocument54 pagesElectrical Parameters: MD Helalur Rahman Executive Engineer Titas 50 MW Power Plant BPDB, Titas, CumillaHelal RahmanNo ratings yet
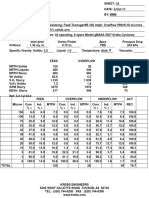
- Erdenet Concentrate Desliming - Alternate gMAX4 Simulation PDFDocument1 pageErdenet Concentrate Desliming - Alternate gMAX4 Simulation PDFolziitulga batboldNo ratings yet
- Circular Motion SolDocument47 pagesCircular Motion SolABCABCNo ratings yet
- History of CFD and Its Important MethodsDocument4 pagesHistory of CFD and Its Important MethodsKaleeswaran EinsteinNo ratings yet
- Dynamic Analysis of Four Bar ChainDocument5 pagesDynamic Analysis of Four Bar ChainNayanNo ratings yet