You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Fpga 4 FunsDocument4 pagesFpga 4 FunsFilipe BrendlerNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Course Title: Linear Integrated Circuits Course Code: 4042 Course Category: B Periods Per Week: 4 Periods Per Semester: 56 Credits: 4Document4 pagesCourse Title: Linear Integrated Circuits Course Code: 4042 Course Category: B Periods Per Week: 4 Periods Per Semester: 56 Credits: 4Sona PrakashNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Casio GZ 500Document26 pagesCasio GZ 500coverguitaNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- A Photographic History of The Florida Division of ForestryDocument146 pagesA Photographic History of The Florida Division of ForestryJeffTabor100% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Lester Young - I Take Two To Tango Sax TenorDocument1 pageLester Young - I Take Two To Tango Sax TenorJan LanNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Si Seulement Je Pouvais Lui Manquer PDFDocument1 pageSi Seulement Je Pouvais Lui Manquer PDFSalvador RamirezNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Substiution of Electron Tubes by Semiconductor ReplacementsDocument10 pagesSubstiution of Electron Tubes by Semiconductor ReplacementsJames BellNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Art History: Prepared By: Aemorelle O. CamarceDocument40 pagesArt History: Prepared By: Aemorelle O. CamarcepabitoNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- DuckTales - PERCUSSIONDocument12 pagesDuckTales - PERCUSSIONsportadenoNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- FactSheet GeocachingDocument2 pagesFactSheet GeocachingAndroAnicNo ratings yet
- Saxon VII Corps, 1 February 1813Document2 pagesSaxon VII Corps, 1 February 1813airfix1999No ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Word Formation - ExercisesDocument11 pagesWord Formation - ExercisesInKeeYNo ratings yet
- Athens 2806 Web PDFDocument43 pagesAthens 2806 Web PDFAnaNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Mozart Mass in C Minor GreatDocument4 pagesMozart Mass in C Minor GreatEleonora BondarNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Butcher N Blackbird - Brynne WeaverDocument303 pagesButcher N Blackbird - Brynne WeaverXt Olla83% (6)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Global MarketingDocument26 pagesGlobal Marketingsaad2013No ratings yet
- For AwpDocument65 pagesFor AwpbrindkowsiNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
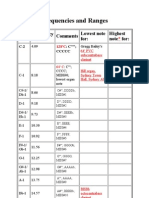
- FrequenciesDocument8 pagesFrequenciesJair GonçalvesNo ratings yet
- Effect of Music Care On Depression and BehavioralDocument8 pagesEffect of Music Care On Depression and BehavioralSaul MorenoNo ratings yet
- How To Read Music in 30 Days - M - Ellul, MatthewDocument269 pagesHow To Read Music in 30 Days - M - Ellul, MatthewSophie Meagher100% (7)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Phrygian Scales - Euphonium (Treble Clef) - LexcerptsDocument1 pagePhrygian Scales - Euphonium (Treble Clef) - LexcerptsLexcerptsNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Guitar Exercises Made Simple - Play Better Guitar Guaranteed!Document57 pagesGuitar Exercises Made Simple - Play Better Guitar Guaranteed!fpralus100% (21)
- CCTV BasicsDocument12 pagesCCTV Basicsdorobantu_alexandru100% (1)
- OUP Academic New TitlesDocument35 pagesOUP Academic New TitlesFernandoNo ratings yet
- Ekahau Wireless Site Survey ToolDocument2 pagesEkahau Wireless Site Survey ToolHugh Haskell-ThomasNo ratings yet
- Practice On Quantifiers and Passive Voice Andrés Ruiz 9DDocument2 pagesPractice On Quantifiers and Passive Voice Andrés Ruiz 9DAndres RuizNo ratings yet
- Futaba T3PDF ManualDocument39 pagesFutaba T3PDF ManualLuke PavoneNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Luigi's Mansion - BASS TROMBONEDocument2 pagesLuigi's Mansion - BASS TROMBONEJuan Camilo TrujilloNo ratings yet
- Mobile ComputingDocument8 pagesMobile ComputingmycatalystsNo ratings yet
- 2014 EY Creating Growth EU Creative IndustriesDocument100 pages2014 EY Creating Growth EU Creative IndustriesPantazis PastrasNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)