You might also like
- Ceromeros Resinas y IonomerosDocument9 pagesCeromeros Resinas y IonomerosPamme CGlézNo ratings yet
- INVIAS - Manual para La Inspección Visual de Obras de Estabilización.Document43 pagesINVIAS - Manual para La Inspección Visual de Obras de Estabilización.Daniel YanceNo ratings yet
- Inferencia EstadisticaDocument5 pagesInferencia EstadisticaJorge Luis Huamaní CárdenasNo ratings yet
- Trabajo de Pronostico - Planificacion de La ProduccionDocument7 pagesTrabajo de Pronostico - Planificacion de La ProduccionNelson HerreraNo ratings yet
- Teoría Del Aprendizaje SignificativoDocument11 pagesTeoría Del Aprendizaje SignificativoPerrex Duran100% (1)
- Cuadro Comparativo Maquinas TermicasDocument3 pagesCuadro Comparativo Maquinas TermicasLibia Rodriguez100% (1)
- esTALLER 3Document5 pagesesTALLER 3Karen AvellanedaNo ratings yet
- Ensayo Procesos Estocasticos 2Document2 pagesEnsayo Procesos Estocasticos 2juanDLreyesNo ratings yet
- ConfianzaDocument2 pagesConfianzaJhonatan Cortes GomezNo ratings yet
- Regresion Lineal 1Document9 pagesRegresion Lineal 1Maribel Martínez MárquezNo ratings yet
- Características Generales de La Luz LáserDocument20 pagesCaracterísticas Generales de La Luz LáserPedro ManuelNo ratings yet
- 1original Sistemas de Transmision - QuispeDocument23 pages1original Sistemas de Transmision - QuispeRodrigo QuispeNo ratings yet
- Probabilidad Actividad 01Document15 pagesProbabilidad Actividad 01Luis JuarezNo ratings yet
- 2 RegLMulDocument21 pages2 RegLMulManuel De Jesús Salas Salas50% (2)
- Ruido Disturbio o Perturbacion Sistema de ControlDocument10 pagesRuido Disturbio o Perturbacion Sistema de ControlRonald ChavezNo ratings yet
- Distribución Muestral de Diferencia de MediasDocument11 pagesDistribución Muestral de Diferencia de MediaselcasavNo ratings yet
- Sesión 6 - PRUEBA DE HIPÓTESIS PARA LA MEDIA (N Menor 30)Document3 pagesSesión 6 - PRUEBA DE HIPÓTESIS PARA LA MEDIA (N Menor 30)Carol Antonella Mayta SehgelmebleNo ratings yet
- Estadistica para Adm FinalDocument6 pagesEstadistica para Adm FinalGraciela YakolobskiNo ratings yet
- Ejercicios Semana 1Document7 pagesEjercicios Semana 1Jose Mauricio Figueroa EncinasNo ratings yet
- Conversiones de unidades y aplicación de la primera ley de la termodinámicaDocument7 pagesConversiones de unidades y aplicación de la primera ley de la termodinámicacamilo0112No ratings yet
- Solución de sistemas de dos ecuaciones con dos incógnitas por métodos analíticosDocument45 pagesSolución de sistemas de dos ecuaciones con dos incógnitas por métodos analíticosLuis Ernesto Herrera AyalaNo ratings yet
- Teoria de Sistemas EfeDocument7 pagesTeoria de Sistemas EfeGerman YaibonaNo ratings yet
- Trabajo Semana 2 Quimica IndustrialDocument18 pagesTrabajo Semana 2 Quimica IndustrialRodrigo BenitesNo ratings yet
- Primer Parcial de Electronica Industrial IiDocument5 pagesPrimer Parcial de Electronica Industrial IiAdrian Hernandez HernandezNo ratings yet
- Distribucion NormalDocument6 pagesDistribucion NormalPaul Quiroz Aliaga100% (1)
- Modelos Estocasticos COMPLETODocument14 pagesModelos Estocasticos COMPLETOMarcos VilchezNo ratings yet
- Tarea N2 AjiDocument17 pagesTarea N2 AjiGilmar Leonardo Rivera ChaureNo ratings yet
- Cuestionario 2Document48 pagesCuestionario 2Daniel Chicho100% (1)
- Practica 9Document10 pagesPractica 9Reyna Zea ApazaNo ratings yet
- Actividad 1 - SOLUCIÓNDocument4 pagesActividad 1 - SOLUCIÓNSebastián AguilarNo ratings yet
- Clase 4 PDFDocument6 pagesClase 4 PDFPERLA NICOL MATUS RIVASNo ratings yet
- Reactancia e Impedancia CapacitivaDocument2 pagesReactancia e Impedancia CapacitivaAnthony Jorge ParedesNo ratings yet
- Informe Monitor CardiacoDocument7 pagesInforme Monitor CardiacoMarco AntonNo ratings yet
- Regresion Lineal (Metodo Minimos Cuadrados)Document8 pagesRegresion Lineal (Metodo Minimos Cuadrados)Charles Zambrano0% (1)
- Regla EmpiricaDocument4 pagesRegla EmpiricaKarla Itzel Alegria JimenezNo ratings yet
- Concavidad y Puntos de InflexiónDocument20 pagesConcavidad y Puntos de InflexiónSthefany33% (3)
- El Papel Que Juega El Mantenimiento Industrial en El Área de TrabajoDocument2 pagesEl Papel Que Juega El Mantenimiento Industrial en El Área de TrabajoAlejandro MartinezNo ratings yet
- Fotocolorimetria Carlos LavarezDocument13 pagesFotocolorimetria Carlos Lavarezcao4020% (1)
- Distribución Chi CuadradoDocument7 pagesDistribución Chi Cuadradorolando mamani cutipaNo ratings yet
- DM tipo 2 confirmación diagnóstico y tratamiento metforminaDocument3 pagesDM tipo 2 confirmación diagnóstico y tratamiento metforminaSilvano Omar Martinez PerezNo ratings yet
- Proteinas - ExposicionDocument53 pagesProteinas - ExposicionSEBASTIAN ALONSO ORTIZ MATTANo ratings yet
- CONTABILIDADDocument3 pagesCONTABILIDADJhonatan AltamiranoNo ratings yet
- Clasificación de Coeficiente de Variación y Coeficiente de DeterminaciónDocument5 pagesClasificación de Coeficiente de Variación y Coeficiente de DeterminaciónCancio Rojas ColqueNo ratings yet
- El Papel Del GerenteDocument17 pagesEl Papel Del GerentePedritosilvaNo ratings yet
- Riesgos físicos no mecánicos en el trabajoDocument27 pagesRiesgos físicos no mecánicos en el trabajoEunice Stephany Mueckay de AsencioNo ratings yet
- SeriesDocument14 pagesSeriesJose AlvaradoNo ratings yet
- Boñon Jimenez William - Transferencia de Calor-03Document3 pagesBoñon Jimenez William - Transferencia de Calor-03William Boñòn JiménezNo ratings yet
- Cuadro Comparativo de Distribuciones de Luis EncinaDocument2 pagesCuadro Comparativo de Distribuciones de Luis Encinaluis Encina15No ratings yet
- Los NanohilosDocument4 pagesLos NanohilosAdrian CabreraNo ratings yet
- Convergencia acelerada método Δ2 AitkenDocument3 pagesConvergencia acelerada método Δ2 AitkenbryggyttNo ratings yet
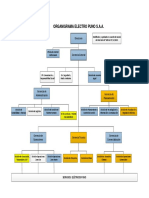
- Organigrama Electro Puno SAADocument1 pageOrganigrama Electro Puno SAAfrankNo ratings yet
- Trabajos Peligrosos e InsalubresDocument2 pagesTrabajos Peligrosos e InsalubreschilindrinochochoNo ratings yet
- Teorema de los valores intermediosDocument5 pagesTeorema de los valores intermediosHilda Deyanira Chuc JimenezNo ratings yet
- Mapa Conceptual de Los Tres Tipos de MantenimientoDocument4 pagesMapa Conceptual de Los Tres Tipos de Mantenimientojavier armandoNo ratings yet
- MapasDocument3 pagesMapasjoseNo ratings yet
- Circuitos Resistivos SimplesDocument28 pagesCircuitos Resistivos SimplesNarly BastoNo ratings yet
- Mecanica de Fluido EjerciciosDocument24 pagesMecanica de Fluido EjerciciosJoel Alexander Perez GutierrezNo ratings yet
- Administración de La Producción Etapa ArtesanalDocument6 pagesAdministración de La Producción Etapa ArtesanalVanessa CruzNo ratings yet
- RecomendacionesDocument3 pagesRecomendacionesGuillermo VásquezNo ratings yet
- Examen Parcial-Vilcahuaman Jesus MiguelDocument4 pagesExamen Parcial-Vilcahuaman Jesus MiguelMigue VilcahuamanjNo ratings yet
- TULSMADocument5 pagesTULSMAStephany Acuña VillamarNo ratings yet
- 08 Enero A FINANZAS-Sem 12Document15 pages08 Enero A FINANZAS-Sem 12Jean Marlon Araujo PradoNo ratings yet
- Introducci On A Los Sistemas de Ecuaciones Lineales: IndiceDocument285 pagesIntroducci On A Los Sistemas de Ecuaciones Lineales: IndiceRodrigo RiveraNo ratings yet
- Materiales Bloque 3 GIOPDocument106 pagesMateriales Bloque 3 GIOPMariela ÑavarezNo ratings yet
- Metodologia para La Evaluación y Formulación de Proyectos de Espacio PúblicoDocument103 pagesMetodologia para La Evaluación y Formulación de Proyectos de Espacio PúblicoagbcarlaNo ratings yet
- 118 Plandesarrollovegach20162019 PDFDocument213 pages118 Plandesarrollovegach20162019 PDFyonatan.cuervoNo ratings yet
- Óxido de Cobre (II)Document3 pagesÓxido de Cobre (II)ArangocjNo ratings yet
- Caracterización Pelicula Activa Biodegradable PDFDocument9 pagesCaracterización Pelicula Activa Biodegradable PDFArangocjNo ratings yet
- EstructurasDocument56 pagesEstructurasChristian BryanNo ratings yet
- Puente SDocument86 pagesPuente SPierre RomeroNo ratings yet
- 2018yamidcastellanos PDFDocument129 pages2018yamidcastellanos PDFMoncho McfzNo ratings yet
- 2018yamidcastellanos PDFDocument129 pages2018yamidcastellanos PDFMoncho McfzNo ratings yet
- Hidrogels PhsensitivesDocument4 pagesHidrogels PhsensitivesArangocjNo ratings yet
- Análisis de La Resistenia Compresión y Flexión Concreto Modificado Fibra FiqueDocument11 pagesAnálisis de La Resistenia Compresión y Flexión Concreto Modificado Fibra FiquejohanitarsNo ratings yet
- Membrana (Estructura)Document1 pageMembrana (Estructura)ArangocjNo ratings yet
- Compresion EstaticaDocument22 pagesCompresion EstaticaAlejandro RiquelmeNo ratings yet
- Nanoparticulas de Plata Con FiqueDocument8 pagesNanoparticulas de Plata Con FiqueArangocjNo ratings yet
- 2111 - Diseno de Un Reactor Biologico de Fangos ActivosDocument38 pages2111 - Diseno de Un Reactor Biologico de Fangos ActivosJefferson D. Ojeda ChumbeNo ratings yet
- Muro Ciclopeo y GavionDocument5 pagesMuro Ciclopeo y GavionvitorbenaventeNo ratings yet
- Uso Muros Gaviones Reparacion Puente Rio Ay CubaDocument13 pagesUso Muros Gaviones Reparacion Puente Rio Ay CubaArangocjNo ratings yet
- Tabla Práctica de Conversión de Unidades AlDocument3 pagesTabla Práctica de Conversión de Unidades Alke3667% (3)
- Presupuesto VíaDocument1 pagePresupuesto VíaArangocjNo ratings yet
- Estructuras de Contención y AnclajesDocument68 pagesEstructuras de Contención y Anclajessebasuq100% (6)
- Estructuras de Contención y AnclajesDocument68 pagesEstructuras de Contención y Anclajessebasuq100% (6)
- Anexo 1 Especificaciones Tecnicas Grupo Ix Etapa II Lic-Bid-20!09!2013Document212 pagesAnexo 1 Especificaciones Tecnicas Grupo Ix Etapa II Lic-Bid-20!09!2013ArangocjNo ratings yet
- Reconocimiento GeotecnicoDocument11 pagesReconocimiento GeotecnicoArangocjNo ratings yet
- Los GavionesDocument26 pagesLos Gavionesarround100% (1)
- Ut4 Diagramas de ProcesosDocument2 pagesUt4 Diagramas de ProcesosJorge GutierrezNo ratings yet
- Manual de Autocad Civil 3d 2014 para CarreterasDocument65 pagesManual de Autocad Civil 3d 2014 para CarreterasDiego Fernando Guzman100% (2)
- Planeamiento de Diseño de Subestaciones PDFDocument34 pagesPlaneamiento de Diseño de Subestaciones PDFkamalNo ratings yet
- CALCULAR CANTIDADES DE OBRA Costo 12 PDFDocument73 pagesCALCULAR CANTIDADES DE OBRA Costo 12 PDFVIlla FcoNo ratings yet
- Ecopetrol NormasDocument133 pagesEcopetrol NormasArangocjNo ratings yet
- Sec 3 Matematicas 2Document4 pagesSec 3 Matematicas 2Toño HernandezNo ratings yet
- 7 - Guía MysqlDocument56 pages7 - Guía Mysqlalexis pieroNo ratings yet
- Polimerizacion CationicaDocument20 pagesPolimerizacion CationicaAdriana Ramos HuayaNo ratings yet
- Diagrama de Conexion Puntos Calientes Logo Seidorf OKDocument1 pageDiagrama de Conexion Puntos Calientes Logo Seidorf OKFernando TamayoNo ratings yet
- Trabajo Práctico FuncionesDocument15 pagesTrabajo Práctico FuncionesBetdani Mora vargas100% (1)
- Proyecto Calculo 1Document22 pagesProyecto Calculo 1Bryan J. Portocarrero RosasNo ratings yet
- Semana 4 Matemática 1º SecundariaDocument10 pagesSemana 4 Matemática 1º SecundariaALEX MOISES CORTEZ GUTIERREZNo ratings yet
- 2020 1105actividad3 PDFDocument5 pages2020 1105actividad3 PDFmargarita giraldoNo ratings yet
- Enteros CombinadosDocument57 pagesEnteros Combinadossandra100% (1)
- Escalas para DominantesDocument1 pageEscalas para DominantesLuis Omar Garcia JiménezNo ratings yet
- Ritmos CambiantesDocument6 pagesRitmos CambiantesRoger Reyes BolañosNo ratings yet
- Campo Magnetico 2Document26 pagesCampo Magnetico 2ALBA ROCIO CCAHUANA CAÑARINo ratings yet
- Foro Semana 5 y 6 - PROGRAMACION DE COMPUTADORESDocument4 pagesForo Semana 5 y 6 - PROGRAMACION DE COMPUTADORESjuan estebanNo ratings yet
- Certificacion Estructural Aiquile 16.08.19Document72 pagesCertificacion Estructural Aiquile 16.08.19OscarQuirogaNo ratings yet
- Lab Fis III CapacitanciaDocument12 pagesLab Fis III CapacitanciaJavierNo ratings yet
- Manual de lectura de planos de arquitecturaDocument39 pagesManual de lectura de planos de arquitecturaFlorchu ArceNo ratings yet
- Metodología-Fermentación-FresaDocument5 pagesMetodología-Fermentación-FresaAndrea CondoNo ratings yet
- Factorización I - Sexto GradoDocument6 pagesFactorización I - Sexto GradoAlbertBorjaAlarconNo ratings yet
- Mecanismos de Produccion en YNFDocument18 pagesMecanismos de Produccion en YNFGaby Huerta100% (1)
- Métodos de Generación de Números PseudoaleatoriosDocument5 pagesMétodos de Generación de Números PseudoaleatoriosCesar Ivan ZegarraNo ratings yet
- A1 CMRCDocument7 pagesA1 CMRCmariamNo ratings yet
- ATM Ingenieria SoftwareDocument12 pagesATM Ingenieria SoftwareJosé MarceNo ratings yet
- SEP Introduccion 2015Document24 pagesSEP Introduccion 2015Charlie IsraelNo ratings yet
- Modalismo y Dodecafonismo)Document13 pagesModalismo y Dodecafonismo)Oscar Eduardo Sadder Rivera100% (1)
- Plano de RiesgosDocument1 pagePlano de RiesgosElias Han Cuba CorzoNo ratings yet
- Ejercicio Clase #11.xlsxpractica en ClaseDocument105 pagesEjercicio Clase #11.xlsxpractica en ClaseDARIO RIVASNo ratings yet