You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Structural Analysis of Gas Turbine BladeDocument4 pagesStructural Analysis of Gas Turbine BladeAnonymous kw8Yrp0R5rNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Direct Photometry Non Invasive Bilirubin DeviceDocument4 pagesDirect Photometry Non Invasive Bilirubin DeviceAnonymous kw8Yrp0R5rNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Color Image Encryption and Decryption by Using Chaotic Baker Map Bit InterleaverDocument4 pagesColor Image Encryption and Decryption by Using Chaotic Baker Map Bit InterleaverAnonymous kw8Yrp0R5rNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Traffic Signal Duration Control by Estimating Vehicle DensityDocument6 pagesTraffic Signal Duration Control by Estimating Vehicle DensityAnonymous kw8Yrp0R5rNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- 240-Bishop-Remote Control Handbook PDFDocument233 pages240-Bishop-Remote Control Handbook PDFSantiago PatitucciNo ratings yet
- Mini Project ReportDocument32 pagesMini Project ReportchaitNo ratings yet
- Rero User ManualDocument109 pagesRero User ManualMOHAMAD KHAIRUL MUSTAQIM BIN MOHAMED FO'AD KPM-GuruNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Multispectrum IR Flame Detector X3301: Description HighlightsDocument2 pagesMultispectrum IR Flame Detector X3301: Description HighlightsbeqsNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Arc Flash Light Intensity Measurement System DesignDocument7 pagesArc Flash Light Intensity Measurement System DesignRaju100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Iot Based Intelligent System For Vehicle Accident Prevention and Detection at Real TimeDocument5 pagesIot Based Intelligent System For Vehicle Accident Prevention and Detection at Real TimeShubham Igewar100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Masimo Emma Capnograph User ManualDocument34 pagesMasimo Emma Capnograph User ManualChristian MuñozNo ratings yet
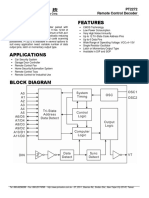
- PT2272Document18 pagesPT2272Ahmad FahmiNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Catalogue S7R5554EX30 enDocument4 pagesCatalogue S7R5554EX30 enChóng ChongNo ratings yet
- CPP Presentation Bhumika and GroupDocument22 pagesCPP Presentation Bhumika and GroupPriyanka KumawatNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Proposal Report For CentrifugeDocument3 pagesProposal Report For CentrifugeDinesh KatochNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Automation Basics - Combustible Gas Detector Sensor Drift - Catalytic vs. Infrared - ISA PDFDocument1 pageAutomation Basics - Combustible Gas Detector Sensor Drift - Catalytic vs. Infrared - ISA PDFAnas AzzedineNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Part 1Document282 pagesPart 1Arash BarbuNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Photobiology PPT by DR AkbarDocument27 pagesPhotobiology PPT by DR AkbarAyesha awanNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Fuji Gas AnalyzersDocument19 pagesFuji Gas AnalyzersKarunakar SiluveruNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Flame DetectorDocument93 pagesFlame DetectorFireProtectionENo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- CamsCan CatologDocument97 pagesCamsCan CatologMustafa AlbayatiNo ratings yet
- Basic Top 10 Arduino Based Projects - 10 Arduino ProjectsDocument65 pagesBasic Top 10 Arduino Based Projects - 10 Arduino ProjectsdjedaiyNo ratings yet
- Fluke Infrared Thermometer 59 MiniDocument1 pageFluke Infrared Thermometer 59 MiniRashidNo ratings yet
- A Multi-Stage Combined Heat Pump and Microwave Vacuum Drying of Green Peas-ZienlinskaDocument10 pagesA Multi-Stage Combined Heat Pump and Microwave Vacuum Drying of Green Peas-ZienlinskaHang NguyenNo ratings yet
- BR-043-8-EN - Exertherm Loadmap 6PP ScreenDocument5 pagesBR-043-8-EN - Exertherm Loadmap 6PP ScreenmasdefrianNo ratings yet
- D101e0218 RSE LLM01Document2 pagesD101e0218 RSE LLM01Panthep PattongNo ratings yet
- Sensors: Krishna Shah Prabin Bhandari Subash Gautam Suresh BhandariDocument25 pagesSensors: Krishna Shah Prabin Bhandari Subash Gautam Suresh BhandariSubash GautamNo ratings yet
- Line Follower and Obstacle Avoidance Bot Using ArduinoDocument4 pagesLine Follower and Obstacle Avoidance Bot Using ArduinorahimNo ratings yet
- Cenelec: European Standard Norme Européenne Europäische NormDocument51 pagesCenelec: European Standard Norme Européenne Europäische NormMartin100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Paper-Driver Assistance Using RaspberrypiDocument4 pagesPaper-Driver Assistance Using RaspberrypiIshaNo ratings yet
- Microsoft Surface: Seminar Report ONDocument27 pagesMicrosoft Surface: Seminar Report ONDevanshu AroraNo ratings yet
- Thermography Application NotesDocument95 pagesThermography Application NotesGabor100% (1)
- IRS Satellites History, Characteristics and ApplicationsDocument10 pagesIRS Satellites History, Characteristics and ApplicationsANSHU KUMARINo ratings yet
- TDi Installation Instructions 080219Document20 pagesTDi Installation Instructions 080219jose mondacaNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)