You might also like
- Centrifuges Fa QDocument4 pagesCentrifuges Fa QEdinson Vallejo VidalNo ratings yet
- Johnson Power Pumping CatalogDocument24 pagesJohnson Power Pumping CatalogAlvaro Patricio Etcheverry TroncosoNo ratings yet
- Centrifugal Pump and Seal Cooling TechnolDocument50 pagesCentrifugal Pump and Seal Cooling TechnolTaifurNo ratings yet
- Part I - NFPA 20 - Chapter 14 Acceptance Testing, Performance, and MaintenanceDocument1 pagePart I - NFPA 20 - Chapter 14 Acceptance Testing, Performance, and MaintenancechylergNo ratings yet
- Hydraulic Power Unit EDocument8 pagesHydraulic Power Unit EDipankar KhawasNo ratings yet
- VSEP Maintenance and Operations TrainingDocument82 pagesVSEP Maintenance and Operations TrainingAshraf BayomiNo ratings yet
- Introduction To CFX: Transient SimulationsDocument19 pagesIntroduction To CFX: Transient SimulationsDaniela BustosNo ratings yet
- 02 Manual-Quick-Start HRP enDocument4 pages02 Manual-Quick-Start HRP enJose Luis HoraNo ratings yet
- Principles of SprayingDocument47 pagesPrinciples of SprayingAlex GhermanNo ratings yet
- Wash and Clean: by Michael Rasmussen, Industry Application Team, Grundfos, DenmarkDocument9 pagesWash and Clean: by Michael Rasmussen, Industry Application Team, Grundfos, DenmarkAlpesh PatelNo ratings yet
- Nemo PDFDocument60 pagesNemo PDFAmandaNo ratings yet
- CT Technical Notification T170603Document2 pagesCT Technical Notification T170603M. Hakan KocakNo ratings yet
- Actuator Selection and SizingDocument27 pagesActuator Selection and SizingGAURAV DANGARNo ratings yet
- Gearbox-Mounted Power Take Off: General InstructionsDocument4 pagesGearbox-Mounted Power Take Off: General InstructionsChimuonechi NyirendaNo ratings yet
- Frequency-Power Characteristics of Synchronous GeneratorDocument29 pagesFrequency-Power Characteristics of Synchronous GeneratorFazalur Rehman Babar75% (4)
- Fluent12 Lecture10 Transient PDFDocument13 pagesFluent12 Lecture10 Transient PDFHuỳnh ToànNo ratings yet
- Tunisia SSD2007Document27 pagesTunisia SSD2007Ahmed JarwanNo ratings yet
- Guidelines For The Provers With CoriolisDocument6 pagesGuidelines For The Provers With CoriolisvalmaxjeonNo ratings yet
- Adv 9Document18 pagesAdv 9Micu Ionut BogdanNo ratings yet
- Solver Settings: Explicit SchemesDocument7 pagesSolver Settings: Explicit Schemesbedhief ahmedNo ratings yet
- 3 B3 ArcuriDocument28 pages3 B3 ArcurijoesuhreNo ratings yet
- HEPHIS Dampers Instruction Manual PDFDocument14 pagesHEPHIS Dampers Instruction Manual PDFsalam87No ratings yet
- HEPHIS Dampers Instruction ManualDocument14 pagesHEPHIS Dampers Instruction Manualsalam87No ratings yet
- Fluent12 Lecture05 Solver SettingsDocument27 pagesFluent12 Lecture05 Solver SettingsHasrizam86No ratings yet
- Dynamic Braking Resistor CalculationDocument10 pagesDynamic Braking Resistor CalculationMuugii AmgaaNo ratings yet
- MH pgs0700Document15 pagesMH pgs0700Hamza Nouman100% (1)
- Espumas InglesDocument25 pagesEspumas InglesGustavo Alberto Alzamora DávalosNo ratings yet
- VNC 7775 BestPractice BP Variable Speed Pump Systems-SCP DIGIDocument12 pagesVNC 7775 BestPractice BP Variable Speed Pump Systems-SCP DIGINilson Eduardo TorresNo ratings yet
- EDUCTORSDocument2 pagesEDUCTORSakhmad saefulNo ratings yet
- What Is PID-Tutorial Overview: Proportional Band Integral DerivativeDocument5 pagesWhat Is PID-Tutorial Overview: Proportional Band Integral Derivativethenu.chandru1042No ratings yet
- DESMI VFD 2020 - Constant Speed vs. Variable SpeedDocument18 pagesDESMI VFD 2020 - Constant Speed vs. Variable SpeedAhmed GhonimNo ratings yet
- Soft Starter Vs VFDDocument15 pagesSoft Starter Vs VFDMitesh GandhiNo ratings yet
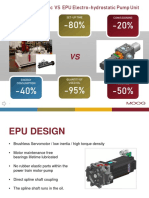
- MOOG Standard Hydraulic VS EPU Electro-Hydrostatic PumpDocument11 pagesMOOG Standard Hydraulic VS EPU Electro-Hydrostatic Pumppeter100% (1)
- Imprimindo - PID Tune Control PanelDocument7 pagesImprimindo - PID Tune Control PanelmarceloenderleNo ratings yet
- 5 Hydropower SystemDocument57 pages5 Hydropower Systemgabriel147258369No ratings yet
- Precious Plastic - Info On MotorsDocument15 pagesPrecious Plastic - Info On MotorsWillemVandeputNo ratings yet
- Superflo VS: Variable Speed PumpDocument4 pagesSuperflo VS: Variable Speed PumpsmitharsNo ratings yet
- Mallaysia ACST2008Document27 pagesMallaysia ACST2008Ahmed JarwanNo ratings yet
- Tension Control and Winder Application GuideDocument7 pagesTension Control and Winder Application GuideSachuuNo ratings yet
- 03 UnderstandingToroidalVDesignDocument21 pages03 UnderstandingToroidalVDesignMurugesh BalaguruNo ratings yet
- WEG Vfds Vs Soft Starters White Paper Vfdsvssoftstarters Technical Article EnglishDocument5 pagesWEG Vfds Vs Soft Starters White Paper Vfdsvssoftstarters Technical Article EnglishcartarNo ratings yet
- Fast Bus Changeover PDFDocument8 pagesFast Bus Changeover PDFhussainNo ratings yet
- Application Note CTAN #299: Simple Commander SK Torque WinderDocument9 pagesApplication Note CTAN #299: Simple Commander SK Torque Winderpictures19821982No ratings yet
- Industrial RO System DubaiDocument34 pagesIndustrial RO System DubaiaquaproNo ratings yet
- Commercial Ro 10k 40k GPD ManualDocument29 pagesCommercial Ro 10k 40k GPD ManualJoab Gabriel Elegado CalumpianoNo ratings yet
- ECE 576 - Power System Dynamics and Stability: Lecture 6: Transient Stability Intro, Synchronous Machine ModelingDocument47 pagesECE 576 - Power System Dynamics and Stability: Lecture 6: Transient Stability Intro, Synchronous Machine ModelingJorge AndrésNo ratings yet
- CI-Disc-Actuator SpecsDocument2 pagesCI-Disc-Actuator SpecsMAHAMMADRAFEEQ MANVINo ratings yet
- 04 - ED Technical Training Part 4Document31 pages04 - ED Technical Training Part 4Калин АнгеловNo ratings yet
- 1Document17 pages1Darryl Santos100% (1)
- T.A.S.T.E. Evaporator: The Evaporator To Use For Heat Sensitive ProductsDocument8 pagesT.A.S.T.E. Evaporator: The Evaporator To Use For Heat Sensitive ProductsYacineNo ratings yet
- Variable Speed Drive Pump Promotional Brochure LRDocument4 pagesVariable Speed Drive Pump Promotional Brochure LRKarthik MandyaNo ratings yet
- 828D Servo OptimisationDocument64 pages828D Servo OptimisationMateus Mugnol toigoNo ratings yet
- Trans Chapter5Document80 pagesTrans Chapter5Sivapriya SamyNo ratings yet
- 080544R - Stepper Motor and DriversDocument8 pages080544R - Stepper Motor and DriversAnuruddha WijerathneNo ratings yet
- Optimizing HVAC Water Pumping SystemsDocument49 pagesOptimizing HVAC Water Pumping SystemsVasanth KumarNo ratings yet
- How to Select the Right Centrifugal Pump: A Brief Survey of Centrifugal Pump Selection Best PracticesFrom EverandHow to Select the Right Centrifugal Pump: A Brief Survey of Centrifugal Pump Selection Best PracticesRating: 5 out of 5 stars5/5 (1)
- Adaptive Filter: Enhancing Computer Vision Through Adaptive FilteringFrom EverandAdaptive Filter: Enhancing Computer Vision Through Adaptive FilteringNo ratings yet
- Operator’S Guide to Centrifugal Pumps, Volume 2: What Every Reliability-Minded Operator Needs to KnowFrom EverandOperator’S Guide to Centrifugal Pumps, Volume 2: What Every Reliability-Minded Operator Needs to KnowNo ratings yet
- Filter Bank: Insights into Computer Vision's Filter Bank TechniquesFrom EverandFilter Bank: Insights into Computer Vision's Filter Bank TechniquesNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Homogeneous Transformation Matrices Example: Puma 560: ©2017 Max DonathDocument19 pagesHomogeneous Transformation Matrices Example: Puma 560: ©2017 Max DonathchrisNo ratings yet
- ME5286RoboticsToday - 1-RobotArms2017 PDFDocument5 pagesME5286RoboticsToday - 1-RobotArms2017 PDFchrisNo ratings yet
- Inverse Kinematics: The Problem: ©2017 Max DonathDocument23 pagesInverse Kinematics: The Problem: ©2017 Max DonathchrisNo ratings yet
- Robots in The Field, Part 3Document3 pagesRobots in The Field, Part 3chrisNo ratings yet
- ME5286CourseNotes7 2017 PDFDocument11 pagesME5286CourseNotes7 2017 PDFchrisNo ratings yet
- UMN EE 2301 Exam 1Document7 pagesUMN EE 2301 Exam 1chrisNo ratings yet
- UMN EE2301 Final ExamDocument10 pagesUMN EE2301 Final ExamchrisNo ratings yet