You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Syphonic Roof Drainage System: P. C. Chang, MRDocument12 pagesThe Syphonic Roof Drainage System: P. C. Chang, MRsameeraNo ratings yet
- LicenseDocument1 pageLicenseAshish SharmaNo ratings yet
- Site StafDocument9 pagesSite StafsameeraNo ratings yet
- Lightning Protection AssignmentDocument4 pagesLightning Protection AssignmentsameeraNo ratings yet
- Site StafDocument9 pagesSite StafsameeraNo ratings yet
- MepDocument5 pagesMepsameeraNo ratings yet
- Sun Power Engineering (PVT) LTD: No 74/12, Dikwella Road, Beliatta, SrilankaDocument4 pagesSun Power Engineering (PVT) LTD: No 74/12, Dikwella Road, Beliatta, SrilankasameeraNo ratings yet
- Site StafDocument9 pagesSite StafsameeraNo ratings yet
- Activities Description Total Qty 0 Qty Emp. No. Machinery / Equipment Daily % Overall %Document13 pagesActivities Description Total Qty 0 Qty Emp. No. Machinery / Equipment Daily % Overall %Sameera GamageNo ratings yet
- DS 2530SwitchSeriesDocument20 pagesDS 2530SwitchSeriesyassineNo ratings yet
- Site StafDocument9 pagesSite StafsameeraNo ratings yet
- DS 2530SwitchSeriesDocument25 pagesDS 2530SwitchSeriessameeraNo ratings yet
- Site StafDocument9 pagesSite StafsameeraNo ratings yet
- Site StafDocument9 pagesSite StafsameeraNo ratings yet
- IEC 61850 Certificate Level ADocument2 pagesIEC 61850 Certificate Level AsameeraNo ratings yet
- Activities Description Total Qty 0 Labor Emp. No. Machinery / Equipment Daily % Overall %Document8 pagesActivities Description Total Qty 0 Labor Emp. No. Machinery / Equipment Daily % Overall %sameeraNo ratings yet
- Site StafDocument9 pagesSite StafsameeraNo ratings yet
- Ee8236 - Electrical Systems in Buildings: (2.10) Low Voltage SwitchgearDocument6 pagesEe8236 - Electrical Systems in Buildings: (2.10) Low Voltage SwitchgearsameeraNo ratings yet
- IEC 61850 Certificate Level ADocument2 pagesIEC 61850 Certificate Level AsameeraNo ratings yet
- Site StafDocument9 pagesSite StafsameeraNo ratings yet
- New Doc From PCDocument1 pageNew Doc From PCsameeraNo ratings yet
- IEC 61850 Certificate Level ADocument2 pagesIEC 61850 Certificate Level AsameeraNo ratings yet
- IEC 61850 Certificate Level ADocument2 pagesIEC 61850 Certificate Level AsameeraNo ratings yet
- IEC 61850 Certificate Level ADocument2 pagesIEC 61850 Certificate Level AsameeraNo ratings yet
- 11-1518 Schneider Electric ION8650 CertificateDocument2 pages11-1518 Schneider Electric ION8650 CertificatesameeraNo ratings yet
- Location Description Qty DI Do Ai: Plumbing System Ground Floor Plumbing Plumbing Cold Water Pumps 2Document22 pagesLocation Description Qty DI Do Ai: Plumbing System Ground Floor Plumbing Plumbing Cold Water Pumps 2sameeraNo ratings yet
- IEC 61850 Certificate Level ADocument2 pagesIEC 61850 Certificate Level AsameeraNo ratings yet
- IEC 61850 Certificate Level ADocument2 pagesIEC 61850 Certificate Level AsameeraNo ratings yet
- 9316 HT SSM Specifications UK Version - SpecDocument2 pages9316 HT SSM Specifications UK Version - SpecsameeraNo ratings yet
- Tabla Awg A mm2Document1 pageTabla Awg A mm2Francisco HernandezNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Solar PV Installation Manual Roof MountedDocument56 pagesSolar PV Installation Manual Roof MountedAlberto Quilca Vilca100% (1)
- Standardization of Power Transformers: Dipl.-Ing. Karl-Heinz Häger Alstom Grid GMBH Activity Schorch TransformersDocument30 pagesStandardization of Power Transformers: Dipl.-Ing. Karl-Heinz Häger Alstom Grid GMBH Activity Schorch TransformerseviNo ratings yet
- Electric Actuator ARI-PREMIO: Data Sheet 000001 Englisch (English)Document12 pagesElectric Actuator ARI-PREMIO: Data Sheet 000001 Englisch (English)ErdincNo ratings yet
- S133 Product Brochure Dec 2022Document4 pagesS133 Product Brochure Dec 2022Priyanshu SharmaNo ratings yet
- Power System Protection Part - 1 DR - Prof.Mohammed TawfeeqDocument59 pagesPower System Protection Part - 1 DR - Prof.Mohammed TawfeeqEngr Zia UR RehmanNo ratings yet
- Crouse Hinds Industrial FittingsDocument166 pagesCrouse Hinds Industrial FittingsJonathan FerueloNo ratings yet
- Lab Report FZ CurrentDocument9 pagesLab Report FZ Currentaimi BatrisyiaNo ratings yet
- Electric Mobility Solutions PresentationDocument27 pagesElectric Mobility Solutions Presentationapi-4512935233% (3)
- DC LED Lights and Solar LightsDocument4 pagesDC LED Lights and Solar LightsNaldo da GraçaNo ratings yet
- Basic Lab Question 2021 For Group B Final 2Document15 pagesBasic Lab Question 2021 For Group B Final 2Anikendu MaitraNo ratings yet
- 9.1.13.5 Dry Type Transformer User ManualDocument6 pages9.1.13.5 Dry Type Transformer User ManualDindie GarvidaNo ratings yet
- A11 Electric Diagram-3Document7 pagesA11 Electric Diagram-3Ibrahim TamerNo ratings yet
- (Operation & Service Manual) : Poskom High Frequency GeneratorDocument44 pages(Operation & Service Manual) : Poskom High Frequency GeneratorWaheed Mido100% (5)
- ABS202 ABS210: Single Phase 2 .0 AMP. Glass Passivated Bridge RectifiersDocument2 pagesABS202 ABS210: Single Phase 2 .0 AMP. Glass Passivated Bridge RectifiersAbdul HadiNo ratings yet
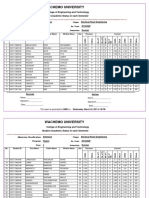
- Wachemo University: College of Engineering and Technology Student Academic Status in Each SemesterDocument5 pagesWachemo University: College of Engineering and Technology Student Academic Status in Each SemesterMitikuNo ratings yet
- Vo0250swd 50 Tech Data Rev.1 EngDocument2 pagesVo0250swd 50 Tech Data Rev.1 EngtalaNo ratings yet
- NTPCDocument4 pagesNTPCSriram VenkatachariNo ratings yet
- Quick Warping CapstansDocument11 pagesQuick Warping CapstansartemNo ratings yet
- Catalogo 2012Document76 pagesCatalogo 2012Christian ReynagaNo ratings yet
- BrochureDocument12 pagesBrochureDavid J LopezNo ratings yet
- Swiss Arms Burst Unit PDFDocument1 pageSwiss Arms Burst Unit PDFChristos AgelisNo ratings yet
- Surge Protection Technical TrainingDocument52 pagesSurge Protection Technical TrainingAndrewcaesarNo ratings yet
- Industrial Electrical Maintenance Training CoursesDocument9 pagesIndustrial Electrical Maintenance Training CoursesBuddy EkoNo ratings yet
- Growatt Hope 4.8L-C1 Datasheet-20210419Document2 pagesGrowatt Hope 4.8L-C1 Datasheet-20210419Reinaldo TomazNo ratings yet
- DT301Document18 pagesDT301Antonio PalomoNo ratings yet
- Physics II Problems PDFDocument1 pagePhysics II Problems PDFBOSS BOSSNo ratings yet
- Lab 1: M V-I C D: Easuring THE Haracteristics OF A IodeDocument6 pagesLab 1: M V-I C D: Easuring THE Haracteristics OF A IodeAhmed ChNo ratings yet
- Electricity (IGCSE 2011)Document4 pagesElectricity (IGCSE 2011)FN LowNo ratings yet
- 4th YEAR 1st SEM SyllabusDocument13 pages4th YEAR 1st SEM SyllabusSV VinaiiNo ratings yet
- EN ACS880-37 45 To 400 KW HW G A4 PDFDocument282 pagesEN ACS880-37 45 To 400 KW HW G A4 PDFПламен БонинNo ratings yet