You might also like
- Devoir de Contrôle N°3 2ème Semestre - Physique - 3ème Technique (2017-2018) MR Ramzi JlassiDocument2 pagesDevoir de Contrôle N°3 2ème Semestre - Physique - 3ème Technique (2017-2018) MR Ramzi JlassiFarouk LassouedNo ratings yet
- TD N°2 GP 2016-2017Document13 pagesTD N°2 GP 2016-2017SALEHNo ratings yet
- Corrige DS G2Document5 pagesCorrige DS G2BastienBrunNo ratings yet
- TD 10Document49 pagesTD 10Nassro Ziad100% (1)
- 2-Td Chapitre 1 - Introduction A La Résistance Des MatériauxDocument5 pages2-Td Chapitre 1 - Introduction A La Résistance Des MatériauxSaid SaidoNo ratings yet
- Phy 3Document13 pagesPhy 3Yassir Rochd100% (1)
- Mécanisme D'ouverture Automatique D'une Trappe de DésenfumageDocument2 pagesMécanisme D'ouverture Automatique D'une Trappe de DésenfumageSoulaiman Andahmou0% (1)
- Devoir-2 SMDocument2 pagesDevoir-2 SMAYOUB BEN EL MADANYNo ratings yet
- CB2 Ens Phys-ChimDocument2 pagesCB2 Ens Phys-ChimHarold Ng100% (1)
- Polycope 1 Bac SMDocument50 pagesPolycope 1 Bac SMimaneeddami63No ratings yet
- TD 3 CinemaTiqueDocument15 pagesTD 3 CinemaTiqueMohamed OuladNo ratings yet
- Genie Phys 2020 FRDocument3 pagesGenie Phys 2020 FRranim najibNo ratings yet
- Wa0003.Document8 pagesWa0003.a.akraouche2585No ratings yet
- Sujet IG-2006Document8 pagesSujet IG-2006Atou RamNo ratings yet
- Méca C1 Cor TD Ex-1-Et-4Document2 pagesMéca C1 Cor TD Ex-1-Et-4Med yahyaNo ratings yet
- Devoir de Synthese 2 2019 2020 22Document5 pagesDevoir de Synthese 2 2019 2020 22chihebNo ratings yet
- 2006 Liban Exo1 Correction Meca Logan 9ptsDocument5 pages2006 Liban Exo1 Correction Meca Logan 9ptsaa.aa1No ratings yet
- CO1 1S1 2020 IapgDocument2 pagesCO1 1S1 2020 IapgAbdallah NdiayeNo ratings yet
- Mécanique TerrestreDocument6 pagesMécanique TerrestreMouad DohmiNo ratings yet
- Satellite Terrestre-Erreur de Satellisation: OM e A e U D U D U C ADocument23 pagesSatellite Terrestre-Erreur de Satellisation: OM e A e U D U D U C Arien rien100% (1)
- Examen Corrigé 2020-2021Document5 pagesExamen Corrigé 2020-2021elgarouanikaoutarNo ratings yet
- Devoir SMPF G 1 2020 - 101408Document2 pagesDevoir SMPF G 1 2020 - 101408saheloussama339No ratings yet
- Série Exercices ROTATION20323Document2 pagesSérie Exercices ROTATION20323Douae GhoulaichiNo ratings yet
- 201701271232325Document9 pages201701271232325Mbarek OmarNo ratings yet
- 201703220939245Document6 pages201703220939245Donia El FerkhNo ratings yet
- TD Révision Cinematique Du SolideDocument8 pagesTD Révision Cinematique Du SolideRomain MarroNo ratings yet
- C2 SV physics trialDocument5 pagesC2 SV physics trialjourymestrah3182019No ratings yet
- Serie Dynamique de RotationDocument9 pagesSerie Dynamique de Rotationbechir sidialyNo ratings yet
- TP Physique03Document14 pagesTP Physique03Doudou KingNo ratings yet
- Serie 2 3 Applcations Des Bases de La DynamiqueDocument12 pagesSerie 2 3 Applcations Des Bases de La Dynamiquebip100% (1)
- إلامتحانات التجريبية 2023Document40 pagesإلامتحانات التجريبية 2023AYEX EDIT0% (1)
- ExamenDocument2 pagesExamenGermain YvesNo ratings yet
- TD4Document3 pagesTD4Samir2020No ratings yet
- TD Mec 5 OscillateurDocument5 pagesTD Mec 5 OscillateurChafi DrissNo ratings yet
- Chimie (5points)Document7 pagesChimie (5points)khlifisamir19No ratings yet
- Série D'exercices - (Avec Correction) - Poussé D'archimède - Equilibre 3 Forces & Action Acide Sur CalcaireDocument4 pagesSérie D'exercices - (Avec Correction) - Poussé D'archimède - Equilibre 3 Forces & Action Acide Sur Calcaireabdelhamid86% (7)
- pb6 2 PDFDocument4 pagespb6 2 PDFAnis SouissiNo ratings yet
- Serie Oscillations Mécaniques LibresDocument6 pagesSerie Oscillations Mécaniques Libreskhlifisamir19No ratings yet
- P12 Oscillateurs méc.-WahabDiop PDFDocument7 pagesP12 Oscillateurs méc.-WahabDiop PDFMOSTAFA100% (3)
- Solution - Exercices de Mouvement de Rotation Dun Solide Autour Dun Axe FixeDocument9 pagesSolution - Exercices de Mouvement de Rotation Dun Solide Autour Dun Axe FixeThiouto SowNo ratings yet
- Oscillation Mécanique Tle SDocument9 pagesOscillation Mécanique Tle SEL HADJI MOR KOUTANo ratings yet
- Premier Exercice: (7 Points) Oscillateur Mécanique: I OG V VI DX DTDocument9 pagesPremier Exercice: (7 Points) Oscillateur Mécanique: I OG V VI DX DTAli RammalNo ratings yet
- C3 TD CorrectionDocument6 pagesC3 TD Correctionmittjet123No ratings yet
- DM9 Lois FrottementsDocument4 pagesDM9 Lois FrottementsYoussef MzabiNo ratings yet
- Phy 5 PDFDocument8 pagesPhy 5 PDFالغزيزال الحسن EL GHZIZAL HassaneNo ratings yet
- Solution de Devoir - 1 - 1sm - Mesure en Chimiesolide en Rotationtheoreme de Lergie CinetiqueDocument5 pagesSolution de Devoir - 1 - 1sm - Mesure en Chimiesolide en Rotationtheoreme de Lergie CinetiqueMalak MalakchakdiNo ratings yet
- Devoir 2Document2 pagesDevoir 2maroccraftshopNo ratings yet
- Sujet Bacf234 2022Document6 pagesSujet Bacf234 2022Joseph AttignonNo ratings yet
- Semestre 3 DS 2 2015-2016Document6 pagesSemestre 3 DS 2 2015-2016Abdelali YacoubiNo ratings yet
- Oscillations Mecaniques Libres PDFDocument6 pagesOscillations Mecaniques Libres PDFMohamed El OuahdaniNo ratings yet
- Application D BasesDocument16 pagesApplication D BasesBabacarDiagoNo ratings yet
- PhysiqueDocument8 pagesPhysiquegabriel monkonNo ratings yet
- 1bac Série D'exercicesDocument2 pages1bac Série D'exercicesOtmaneNo ratings yet
- TD4TMCDocument3 pagesTD4TMCFarhi OussamaNo ratings yet
- Devoir 2 Exemplesemestre 1Document2 pagesDevoir 2 Exemplesemestre 1Yassine Berchil100% (2)
- DM2 MecaniqueDocument6 pagesDM2 MecaniqueyouthangouokoNo ratings yet
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésFrom EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésRating: 4.5 out of 5 stars4.5/5 (4)
- Moteur GX 31: Solid EdgeDocument1 pageMoteur GX 31: Solid EdgeMahrez ZaafouriNo ratings yet
- Sans Titre7Document1 pageSans Titre7Mahrez ZaafouriNo ratings yet
- Bac Pro Mei Code: AP 2006-MEI ST 11 1 Session 2020 Dossier Technique Et Ressources E1 Sous-Epreuve E11 Durée: 4 H Coefficient: 3 DTR: 5/8Document1 pageBac Pro Mei Code: AP 2006-MEI ST 11 1 Session 2020 Dossier Technique Et Ressources E1 Sous-Epreuve E11 Durée: 4 H Coefficient: 3 DTR: 5/8Mahrez ZaafouriNo ratings yet
- Extrait Du Guide Du Dessinateur IndustrielDocument1 pageExtrait Du Guide Du Dessinateur IndustrielMahrez ZaafouriNo ratings yet
- 3-Recherche Des Solutions Pour Chaque FonctionDocument1 page3-Recherche Des Solutions Pour Chaque FonctionMahrez ZaafouriNo ratings yet
- Page 4Document1 pagePage 4Mahrez ZaafouriNo ratings yet
- Présentation: CD3.1: Rédiger Partiellement Un Cahier Des ChargesDocument1 pagePrésentation: CD3.1: Rédiger Partiellement Un Cahier Des ChargesMahrez ZaafouriNo ratings yet
- A-Saisir Le Besoin: S. Qualité EnquêteDocument1 pageA-Saisir Le Besoin: S. Qualité EnquêteMahrez ZaafouriNo ratings yet
- D-Hiérarchisation Des Fonctions de Service: Estime Accordée Par Le Client / Coût D'obtentionDocument1 pageD-Hiérarchisation Des Fonctions de Service: Estime Accordée Par Le Client / Coût D'obtentionMahrez ZaafouriNo ratings yet
- Document Constructeur Choix RéducteurDocument1 pageDocument Constructeur Choix RéducteurMahrez ZaafouriNo ratings yet
- Bac Pro Mei Code: AP 2006-MEI ST 11 1 Session 2020 Dossier Technique Et Ressources E1 Sous-Epreuve E11 Durée: 4 H Coefficient: 3 DTR: 3/8Document1 pageBac Pro Mei Code: AP 2006-MEI ST 11 1 Session 2020 Dossier Technique Et Ressources E1 Sous-Epreuve E11 Durée: 4 H Coefficient: 3 DTR: 3/8Mahrez ZaafouriNo ratings yet
- 12Document1 page12Mahrez ZaafouriNo ratings yet
- Page 3Document1 pagePage 3Mahrez ZaafouriNo ratings yet
- Page 5Document1 pagePage 5Mahrez ZaafouriNo ratings yet
- Liaisons Equivalentes-5Document5 pagesLiaisons Equivalentes-5Mahrez ZaafouriNo ratings yet
- Page 1Document1 pagePage 1Mahrez ZaafouriNo ratings yet
- Liaisons Equivalente-4sDocument3 pagesLiaisons Equivalente-4sMahrez ZaafouriNo ratings yet
- Page 2Document1 pagePage 2Mahrez ZaafouriNo ratings yet
- Liaisons Equivalentes-3Document3 pagesLiaisons Equivalentes-3Mahrez ZaafouriNo ratings yet
- Liaisons Equivalentes-2Document5 pagesLiaisons Equivalentes-2Mahrez ZaafouriNo ratings yet
- 3Document1 page3Mahrez ZaafouriNo ratings yet
- Liaisons Equivalentes-1Document3 pagesLiaisons Equivalentes-1Mahrez ZaafouriNo ratings yet
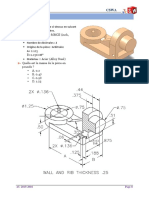
- I-Question 1: Iset SBZ CswaDocument1 pageI-Question 1: Iset SBZ CswaMahrez ZaafouriNo ratings yet
- Contrôle de La Clavette Parallèle: RemarqueDocument1 pageContrôle de La Clavette Parallèle: RemarqueMahrez ZaafouriNo ratings yet
- 2Document1 page2Mahrez ZaafouriNo ratings yet
- Contenu de La Formation CSWADocument1 pageContenu de La Formation CSWAMahrez ZaafouriNo ratings yet
- 4.3.8 Exemple de Contrôle D'Un Assemblage À Clavette: 2 2 2 P GL N GLDocument1 page4.3.8 Exemple de Contrôle D'Un Assemblage À Clavette: 2 2 2 P GL N GLMahrez ZaafouriNo ratings yet
- 1Document1 page1Mahrez ZaafouriNo ratings yet
- Iset SBZ CswaDocument1 pageIset SBZ CswaMahrez ZaafouriNo ratings yet
- I-Question 1: Iset SBZ CswaDocument1 pageI-Question 1: Iset SBZ CswaMahrez ZaafouriNo ratings yet
- GM3 EngrenagesDocument94 pagesGM3 Engrenagesghourabisarra8No ratings yet
- 2 - Pieces Mecaniques ElementairesDocument14 pages2 - Pieces Mecaniques ElementairesYoucef MimouniNo ratings yet
- Boite DSG 02EDocument64 pagesBoite DSG 02ENoureddine Hamla100% (2)
- ''Comfort Shift'' Description Du FonctionnementDocument30 pages''Comfort Shift'' Description Du FonctionnementAbdelhak EzzahriouiNo ratings yet
- TD2 Partie2 TapisDocument3 pagesTD2 Partie2 TapisSA IDNo ratings yet
- Mecanique Des Solides - CoursDocument23 pagesMecanique Des Solides - CoursDABAKH LDEEBOYNo ratings yet
- Cinemat Plane Exposé01Document50 pagesCinemat Plane Exposé01Achraf El aouameNo ratings yet
- Autodesk AutoCAD 2021Document89 pagesAutodesk AutoCAD 2021bennane cidNo ratings yet
- MouvementDocument8 pagesMouvementAbd'salam LazNo ratings yet
- Meca Solide Projection Chapitre2Document49 pagesMeca Solide Projection Chapitre2Elio RiachiNo ratings yet
- Torseur Action MecaniqueDocument8 pagesTorseur Action MecaniqueMaha Karray100% (1)
- Chaine CinematiqueDocument44 pagesChaine CinematiqueAntoine MalléNo ratings yet
- 4 - Transmission de PuissanceDocument36 pages4 - Transmission de PuissanceElhousine EchchhibatNo ratings yet
- Corrigé TD 13 - Comportement Cinématique Des SystèmesDocument4 pagesCorrigé TD 13 - Comportement Cinématique Des Systèmesbhs channelNo ratings yet
- Correction Sujet 1Document5 pagesCorrection Sujet 1Brahim AbdelliNo ratings yet
- Exercices Moments Forces Verticales1 DjalalDocument9 pagesExercices Moments Forces Verticales1 DjalalmimofaresNo ratings yet
- (PAPER) Vezole, P (2002) Ancrages Passifs Verticaux Et Calcul À La Rupture - RFG - 2002 - N - 98Document16 pages(PAPER) Vezole, P (2002) Ancrages Passifs Verticaux Et Calcul À La Rupture - RFG - 2002 - N - 98O SNo ratings yet
- Physique Résumé Du Cours en Fiches MPSI-MPDocument176 pagesPhysique Résumé Du Cours en Fiches MPSI-MPyassino89100% (22)
- Variateur-Courroie STEDocument9 pagesVariateur-Courroie STEMansour NdiayeNo ratings yet
- TP46 Micromoteur GPSDocument8 pagesTP46 Micromoteur GPSVinicius SalomaoNo ratings yet
- Mini Projet de RéducteurDocument14 pagesMini Projet de RéducteurWissem OthmaniNo ratings yet
- Suspension MotoDocument12 pagesSuspension Motohenri100% (1)
- Rapport Des Travaux Pratiques G1 enDocument37 pagesRapport Des Travaux Pratiques G1 enYoro Boubou SIDIBENo ratings yet
- 5SBUAA5Document34 pages5SBUAA5Michel PretNo ratings yet
- Liaisons PDFDocument8 pagesLiaisons PDFTriki BilelNo ratings yet
- 121 1 Mini Concours Sup EnonceDocument9 pages121 1 Mini Concours Sup EnoncezakNo ratings yet
- 25 1 PDFDocument12 pages25 1 PDFsaidNo ratings yet
- Exo 06 07 Corrige Chaines OuvertesDocument4 pagesExo 06 07 Corrige Chaines OuvertesAyoubNo ratings yet
- Preparation DS 05Document8 pagesPreparation DS 05الدعم الجامعيNo ratings yet