You might also like
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- DrilflexDocument4 pagesDrilflexmurdicksNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- 01-Unit-01-Waves and Optics Lectures L1-L3Document15 pages01-Unit-01-Waves and Optics Lectures L1-L3Evariste MigaboNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Cross Reference Odpowiedniki - DanfossDocument29 pagesCross Reference Odpowiedniki - DanfossDanielEscobarMontecinosNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Sap MRP Configuration PPDocument27 pagesSap MRP Configuration PPKidana TestNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Sef 0l6aeDocument144 pagesSef 0l6aezarni zarniNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Graphs of Polynomial FunctionsDocument38 pagesGraphs of Polynomial FunctionsEvelyn MaligayaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Blood Smear Examination 1معدل Document74 pagesBlood Smear Examination 1معدل Kenesa100% (1)
- Sense HatDocument2 pagesSense HatRachel TaoNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Tugas Paper Mekanika PatahanDocument1 pageTugas Paper Mekanika PatahanRahmandhika Firdauzha Hary HernandhaNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Calculating IPv4 Subnets - ANSWER - KEYDocument8 pagesCalculating IPv4 Subnets - ANSWER - KEYPaul John QuirosNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Sem - Course - Curriculum-ECE - DTU - 3rd SemDocument8 pagesSem - Course - Curriculum-ECE - DTU - 3rd SemRohit Kumar SinghNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- 9) Locking in MysqlDocument15 pages9) Locking in MysqlRemote MySQL DBANo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Case Study 1Document2 pagesCase Study 1Tushar NepaleNo ratings yet
- The Low Potencies of HomeopathyDocument54 pagesThe Low Potencies of HomeopathySabitri GuptaNo ratings yet
- Article 6 V4sldier Pile and LaggingDocument9 pagesArticle 6 V4sldier Pile and LaggingBambangBuwonoNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Beam Reinforcement CalculationDocument8 pagesBeam Reinforcement CalculationAnish KumarNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
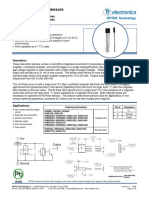
- Hallogic Hall-Effect Sensors: FeaturesDocument9 pagesHallogic Hall-Effect Sensors: FeaturesMichel MoacirNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Jurnal AutorefractometerDocument11 pagesJurnal AutorefractometerNeida Valeria DanunNo ratings yet
- BTechElectronicsandCommunicationEngineering CurriculumDocument7 pagesBTechElectronicsandCommunicationEngineering CurriculumVignesh AiyerNo ratings yet
- Mock Test - 5Document37 pagesMock Test - 5Anirban DeNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- LinuxDocument16 pagesLinuxJon ExcaliburNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Euler-Maclaurin Expansion and Woolhouse's Formula: A S. M Volume 2, Pp. 631-633 inDocument3 pagesEuler-Maclaurin Expansion and Woolhouse's Formula: A S. M Volume 2, Pp. 631-633 inAyu Nurul AtiqohNo ratings yet
- Galileo Basic CommandsDocument9 pagesGalileo Basic Commandsbharatstar85% (13)
- Note CHP 2-Material Science 281 Uitm Em110Document74 pagesNote CHP 2-Material Science 281 Uitm Em110bino_rye100% (1)
- Stacked Reservoirs Development Optimization Technical PaperDocument1 pageStacked Reservoirs Development Optimization Technical PaperJoy FaruzNo ratings yet
- MTH101 TutorialDocument2 pagesMTH101 TutorialOnochie EnunwaonyeNo ratings yet
- Tutorial Sheet 2213Document2 pagesTutorial Sheet 2213Mithilesh GuruNo ratings yet
- Oracle Database: Performance Tuning Guide 12c Release 1 (12.1)Document340 pagesOracle Database: Performance Tuning Guide 12c Release 1 (12.1)sanjayid1980No ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Elements of Mechanical Design - Mechanisms (2D Kinematic Analysis)Document27 pagesElements of Mechanical Design - Mechanisms (2D Kinematic Analysis)jotageaNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)