You might also like
- Indian Institute of Science: Problem 1Document4 pagesIndian Institute of Science: Problem 1ChandreshSinghNo ratings yet
- CH 30Document12 pagesCH 30aNo ratings yet
- BoS 2022 MX2 Trials - Q12 Solutions & Markers NotesDocument5 pagesBoS 2022 MX2 Trials - Q12 Solutions & Markers NotesasdcNo ratings yet
- HW2 DinhCongThanh k67k PhysicsDocument6 pagesHW2 DinhCongThanh k67k PhysicsAnonymous UiH9hwNo ratings yet
- Tutorial 14 AnswerDocument10 pagesTutorial 14 AnswerFlavus J.No ratings yet
- P524 Higher-GenusDocument3 pagesP524 Higher-Genusm rNo ratings yet
- Xu19a SuppDocument4 pagesXu19a SuppIgnacio AndresNo ratings yet
- PolynomialsDocument19 pagesPolynomialsMerun BoseNo ratings yet
- TutorialDocument29 pagesTutorialAmalinaNo ratings yet
- For Control PDocument1 pageFor Control PAgustin ComeglioNo ratings yet
- Constants and Key Equations in Chemicall ReactionDocument5 pagesConstants and Key Equations in Chemicall ReactionFrancisca BrazNo ratings yet
- G14FOS (Exam 2) Solutions 2013/14Document5 pagesG14FOS (Exam 2) Solutions 2013/14meettoavi059No ratings yet
- IIT - PCM-2003 With Solutions PDFDocument32 pagesIIT - PCM-2003 With Solutions PDFShubham KumarNo ratings yet
- Pde PaulDocument57 pagesPde Paulsolomon khaluhiNo ratings yet
- Eth Catalan 2Document7 pagesEth Catalan 2hikzzNo ratings yet
- Reynolds Equationsolutionusing FEMin MATLABDocument13 pagesReynolds Equationsolutionusing FEMin MATLABGe YemoNo ratings yet
- An Elementary Proof of Catalan-Mihailescu Theorem: To Cite This VersionDocument7 pagesAn Elementary Proof of Catalan-Mihailescu Theorem: To Cite This VersionTaghi KhajeNo ratings yet
- Floor Function - Titu Andreescu, Dorin Andrica - MR 2006 PDFDocument5 pagesFloor Function - Titu Andreescu, Dorin Andrica - MR 2006 PDFMihnea0% (1)
- Lec 17Document8 pagesLec 17semabayNo ratings yet
- Sma 2371 Pde (Notes)Document54 pagesSma 2371 Pde (Notes)Thomas BwahiNo ratings yet
- Classical Mechanics QuizDocument4 pagesClassical Mechanics QuizeveryoneMD100% (3)
- Solutions Quantum Mechanics 2 PDFDocument43 pagesSolutions Quantum Mechanics 2 PDFAfrah MirNo ratings yet
- Wave PDFDocument10 pagesWave PDFAswin RangkutiNo ratings yet
- 36-708 Statistical Machine Learning Homework #4 Solutions: DUE: April 19, 2019Document16 pages36-708 Statistical Machine Learning Homework #4 Solutions: DUE: April 19, 2019SNo ratings yet
- Repeating The Steps 1, 2, and 3:: rajeshs/QRDocument15 pagesRepeating The Steps 1, 2, and 3:: rajeshs/QRd4v1d66No ratings yet
- 2010 Winter Camp - Warmup SolutionsDocument19 pages2010 Winter Camp - Warmup SolutionsAltananyNo ratings yet
- Olympiad SolutionsDocument3 pagesOlympiad SolutionsJohn SmithNo ratings yet
- Phys8017 QFT (I) - Spring 2024: Instructor: Chang-Tse Hsieh Problem Set #1 (75 PTS) DueDocument2 pagesPhys8017 QFT (I) - Spring 2024: Instructor: Chang-Tse Hsieh Problem Set #1 (75 PTS) DuehoypierrebajonaNo ratings yet
- Lecture 5Document4 pagesLecture 5Dilip BhatiNo ratings yet
- Propagators 2 ParameterDocument7 pagesPropagators 2 Parameterm rNo ratings yet
- Fermat General Iza Do NovoDocument11 pagesFermat General Iza Do NovoGabriel FloresNo ratings yet
- MATH 265 - Final - 2012Document9 pagesMATH 265 - Final - 2012examkillerNo ratings yet
- Homework of CryptographyDocument21 pagesHomework of CryptographygabNo ratings yet
- Sma 2371 Pde DanDocument58 pagesSma 2371 Pde DanArnoldNo ratings yet
- Report - Project: Shell Model 2019Document5 pagesReport - Project: Shell Model 2019Sugan NallaNo ratings yet
- Processos Estoc Asticos: Augusto GadelhaDocument22 pagesProcessos Estoc Asticos: Augusto GadelhaIoneide SoaresNo ratings yet
- Meshless Cubature Over The Disk by Thin-Plate Splines ?: Alessandro Punzi, Alvise Sommariva, Marco VianelloDocument11 pagesMeshless Cubature Over The Disk by Thin-Plate Splines ?: Alessandro Punzi, Alvise Sommariva, Marco VianellodentifricioNo ratings yet
- Solutions To INMO-2020 ProblemsDocument6 pagesSolutions To INMO-2020 ProblemsKamran MehdiyevNo ratings yet
- Em Algo For Multivariate GMMDocument9 pagesEm Algo For Multivariate GMMAnanya AgarwalNo ratings yet
- Solutions-Cryptography Theory and PracticeDocument21 pagesSolutions-Cryptography Theory and PracticeWeiwiJiaNo ratings yet
- UNIT3&5Document3 pagesUNIT3&5tufanialiNo ratings yet
- Processos Estoc Asticos: Augusto GadelhaDocument18 pagesProcessos Estoc Asticos: Augusto GadelhaIoneide SoaresNo ratings yet
- Nakahara GTP SolutionsDocument48 pagesNakahara GTP SolutionsSyed Amir IqbalNo ratings yet
- Nakahara GTP SolutionsDocument50 pagesNakahara GTP SolutionsAlessandro Quercetti67% (3)
- MCQ Unit 6Document7 pagesMCQ Unit 6shaik moulaliNo ratings yet
- Freshman 14 SolDocument3 pagesFreshman 14 SolGag PafNo ratings yet
- Section A: Pure MathematicsDocument6 pagesSection A: Pure MathematicsMohammed ArslaanNo ratings yet
- Một Số Bài Toán Trong Mục 14+ Và 13+Document466 pagesMột Số Bài Toán Trong Mục 14+ Và 13+Dung NguyenNo ratings yet
- UntitledDocument8 pagesUntitled孟君No ratings yet
- 56 MalcheskiA VelinovD MalcheskiR 2018 - MathematicalOlympiadsSkopjeDocument27 pages56 MalcheskiA VelinovD MalcheskiR 2018 - MathematicalOlympiadsSkopjePedro RamirezNo ratings yet
- 46922dc1 64ff 4cd2 A6fd 370839bf95b8Document30 pages46922dc1 64ff 4cd2 A6fd 370839bf95b8Shirsendu ChakrabortyNo ratings yet
- Sma 2371 Pde DanDocument58 pagesSma 2371 Pde Danbradstreetgreg104No ratings yet
- Solution DPP Statistics Mathongo Bitsat 2023 Crash CourseDocument18 pagesSolution DPP Statistics Mathongo Bitsat 2023 Crash CourseAPARNA DIXITNo ratings yet
- The 1Document5 pagesThe 1mcantimurcanNo ratings yet
- EE132B HW5 Sol Winter2018Document5 pagesEE132B HW5 Sol Winter2018bomo wuyowNo ratings yet
- Thermo Equations F21Document3 pagesThermo Equations F21BenNo ratings yet
- L24 PDFDocument11 pagesL24 PDFManchimsetty Sri NidhiNo ratings yet
- E1 251 Linear and Nonlinear Op2miza2on: Chapter 9: The Method of Conjugate Direc6onsDocument32 pagesE1 251 Linear and Nonlinear Op2miza2on: Chapter 9: The Method of Conjugate Direc6onsdata scienceNo ratings yet
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- PHD Thesis Report Format Guidelines: S.No. Guidelines SpecificationsDocument10 pagesPHD Thesis Report Format Guidelines: S.No. Guidelines SpecificationsAr Ayoushika AbrolNo ratings yet
- Nora Alexander: ProfileDocument1 pageNora Alexander: ProfilenorajuliaalexanderNo ratings yet
- Project Risk ManagementDocument104 pagesProject Risk Managementtsrinivasan5083No ratings yet
- Kirlian PhotographyDocument18 pagesKirlian PhotographyjoseNo ratings yet
- Improved Mini-Silo For Studying Fermentation of Silage in Laboratory ConditionsDocument8 pagesImproved Mini-Silo For Studying Fermentation of Silage in Laboratory ConditionsCk_psihNo ratings yet
- Research On Hydraulic Jump Model For A Sluice Gate in A Rectangular Channel Using Laboratory SetupDocument44 pagesResearch On Hydraulic Jump Model For A Sluice Gate in A Rectangular Channel Using Laboratory Setupjerico habitanNo ratings yet
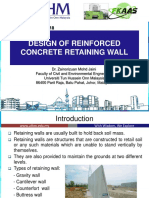
- Chapter 5.0.2018 - Retaining WallDocument36 pagesChapter 5.0.2018 - Retaining WallHawaiiChongNo ratings yet
- Report 1 Water Quality Test TTS 301115 FinishedDocument9 pagesReport 1 Water Quality Test TTS 301115 FinishedJeana Lew SCNo ratings yet
- Form No. NTC 1 22 Application For Tvro Renewal SignedDocument1 pageForm No. NTC 1 22 Application For Tvro Renewal SignedAmor LicudoNo ratings yet
- Interpersonal and Interapersonal Communication6Document20 pagesInterpersonal and Interapersonal Communication6abh ljknNo ratings yet
- BBA LLB Global I Semester Statitics Unit IDocument22 pagesBBA LLB Global I Semester Statitics Unit IPragyan BhadoriyaNo ratings yet
- Data 6005ADocument1 pageData 6005AErick De La RoSaNo ratings yet
- 34630.Seneca-Resume Writing Guide PDFDocument8 pages34630.Seneca-Resume Writing Guide PDFfiq_hugo319No ratings yet
- 2010 Summer SchoolDocument31 pages2010 Summer SchoolAlbanita MendesNo ratings yet
- High Pressure Hazard Safety AwarenessDocument57 pagesHigh Pressure Hazard Safety AwarenessPurnomo JarodNo ratings yet
- Who Am I MemoDocument2 pagesWho Am I Memoapi-652685391No ratings yet
- Unit1 Topic1 Digital Logic IntroductionDocument33 pagesUnit1 Topic1 Digital Logic IntroductionHari Kumar N CNo ratings yet
- Brainstorming and OutliningDocument7 pagesBrainstorming and OutliningWalter Evans LasulaNo ratings yet
- Practices Venn DiagramDocument2 pagesPractices Venn DiagramNathanNo ratings yet
- Revisión Sistemática Toxina BotulínicaDocument8 pagesRevisión Sistemática Toxina BotulínicaJean Pierre Romero FebresNo ratings yet
- Abrasive Jet Machining Unit 2Document7 pagesAbrasive Jet Machining Unit 2anithayesurajNo ratings yet
- Multilevel Viewpoint of A MachineDocument4 pagesMultilevel Viewpoint of A MachineDikshikaAryaNo ratings yet
- Week 3 - Graph of A FunctionDocument6 pagesWeek 3 - Graph of A FunctionDevon JayNo ratings yet
- Assignment Strategic ManagementDocument18 pagesAssignment Strategic ManagementDarmmini MiniNo ratings yet
- Problem E - Ouroboros SnakeDocument1 pageProblem E - Ouroboros SnakeManea SilviuNo ratings yet
- Andrew Bowie Theodor W. Adorno OxfordUP 2022Document144 pagesAndrew Bowie Theodor W. Adorno OxfordUP 2022David González CárdenasNo ratings yet
- Lec 5 (Welded Joint)Document38 pagesLec 5 (Welded Joint)Ahmed HassanNo ratings yet
- Books Vs EbooksDocument9 pagesBooks Vs EbooksThe United IndianNo ratings yet
- Guided Tuning ManualDocument3 pagesGuided Tuning Manualspectrum777No ratings yet
- AVR Studio TutorialDocument8 pagesAVR Studio Tutorialtio2903No ratings yet