You might also like
- Applications of Variational Inequalities in Stochastic ControlFrom EverandApplications of Variational Inequalities in Stochastic ControlRating: 2 out of 5 stars2/5 (1)
- Grade Mixing Analysis in Steelmaking Tundishusing Different Turbulence ModelsDocument6 pagesGrade Mixing Analysis in Steelmaking Tundishusing Different Turbulence ModelsrakukulappullyNo ratings yet
- 4-Bit Carry Look Ahead AdderDocument22 pages4-Bit Carry Look Ahead AdderHani MasoumiNo ratings yet
- D-Waves User ManualDocument150 pagesD-Waves User Manualalfredo liraNo ratings yet
- MAE 376 ProjectDocument6 pagesMAE 376 ProjectJenna HagenNo ratings yet
- Dimensional AnalysisDocument22 pagesDimensional AnalysisMusanif Ahmed FarooqiNo ratings yet
- SDM Short Course Kim2 2005 PDFDocument78 pagesSDM Short Course Kim2 2005 PDFFabricio ValenteNo ratings yet
- Buckingham's Π-Theorem PDFDocument8 pagesBuckingham's Π-Theorem PDFkiran patilNo ratings yet
- LearnCAx Tutorial CFD 01 2015 CFD Simulation of Backward Facing Step ProblemDocument30 pagesLearnCAx Tutorial CFD 01 2015 CFD Simulation of Backward Facing Step ProblemRyan Goh Chuang HongNo ratings yet
- Castle - A Theory of Normal MoveoutDocument17 pagesCastle - A Theory of Normal MoveoutNeil BariiNo ratings yet
- Modal Analysis of Titan Cantilever Beam Using ANSYS and SolidWorksDocument5 pagesModal Analysis of Titan Cantilever Beam Using ANSYS and SolidWorksMohammed AbdulnaserNo ratings yet
- Gromacs User Manual For Molecular ModellingDocument312 pagesGromacs User Manual For Molecular ModellingADITI KONARNo ratings yet
- 01 KernsMethod. 1Document18 pages01 KernsMethod. 1Scott CollierNo ratings yet
- Resume 6 The State of Charge Estimating Methods For BatteryDocument28 pagesResume 6 The State of Charge Estimating Methods For BatteryIhsan BayuNo ratings yet
- Introduction To CF D ModuleDocument46 pagesIntroduction To CF D ModuleResul SahinNo ratings yet
- NUS MA4268 Ch1Document9 pagesNUS MA4268 Ch1ijclement07No ratings yet
- Helicopter AssignmentDocument10 pagesHelicopter AssignmentNauman YousafNo ratings yet
- Guide To Using IVI's (In Matlab, Etc.)Document114 pagesGuide To Using IVI's (In Matlab, Etc.)Nathan T NesbittNo ratings yet
- Sattinger D.H. - Scaling, Mathematical Modeling & Integrable Systems (1998) .PsDocument132 pagesSattinger D.H. - Scaling, Mathematical Modeling & Integrable Systems (1998) .PsAngel LopezNo ratings yet
- Computational Fluid Dynamics For Naval Engineering ProblemsDocument184 pagesComputational Fluid Dynamics For Naval Engineering ProblemsandevariNo ratings yet
- Estimating Moveout ParametersDocument4 pagesEstimating Moveout Parametersmahtab rashidifardNo ratings yet
- Assignment3 Ans 2015 PDFDocument11 pagesAssignment3 Ans 2015 PDFMohsen FragNo ratings yet
- 2011-The Matlab Reservoir Simulation ToolboxDocument29 pages2011-The Matlab Reservoir Simulation ToolboxJoydogNo ratings yet
- DEMPack Tutorial 01Document25 pagesDEMPack Tutorial 01jsaulNo ratings yet
- Dimensional AnalysisDocument50 pagesDimensional Analysism_alodat6144No ratings yet
- Modeling and Control of A Simulated Flight of A Mini Helicopter Using Matlab/SimulinkDocument9 pagesModeling and Control of A Simulated Flight of A Mini Helicopter Using Matlab/SimulinkEmmanuelNo ratings yet
- RGFGRID User ManualDocument140 pagesRGFGRID User ManualcocoNo ratings yet
- Lamb2 PDFDocument186 pagesLamb2 PDFLibyaFlowerNo ratings yet
- 5-Aerofast Development of Cork TPS Material and A 3D ComparativeDocument13 pages5-Aerofast Development of Cork TPS Material and A 3D ComparativeAerospaceAngelNo ratings yet
- The Computation Structure of LCADocument20 pagesThe Computation Structure of LCARamez Mohamad100% (1)
- 012 - Chapter 2 - L10Document12 pages012 - Chapter 2 - L10nanduslns07No ratings yet
- Dominic Carolan RevisedDocument145 pagesDominic Carolan RevisedSujata RoyNo ratings yet
- NOSUWAT6 EIAEMPReportDocument279 pagesNOSUWAT6 EIAEMPReportTangha Muklom KunchaNo ratings yet
- Simpy Documentation: Release 3.0.11Document107 pagesSimpy Documentation: Release 3.0.11amin mNo ratings yet
- Seislab For Matlab: Matlab Software For The Analysis of Seismic and Well-Log Data. A TutorialDocument90 pagesSeislab For Matlab: Matlab Software For The Analysis of Seismic and Well-Log Data. A TutorialHumbang PurbaNo ratings yet
- Computer Graphics BCA Iii Sem Multiple Choice Questions: Ans: Picture ElementDocument20 pagesComputer Graphics BCA Iii Sem Multiple Choice Questions: Ans: Picture ElementRoel PalmairaNo ratings yet
- Turbulent ModellingDocument195 pagesTurbulent ModellingIjaz FazilNo ratings yet
- Determining Trajectory and Angular Momentum of Kinetic MotionDocument5 pagesDetermining Trajectory and Angular Momentum of Kinetic MotionBẢO PHÙNG GIANo ratings yet
- Niraj Kumar: Study of Sloshing Effects in A Cylindrical Tank With and Without Baffles Under Linear AccelerationDocument31 pagesNiraj Kumar: Study of Sloshing Effects in A Cylindrical Tank With and Without Baffles Under Linear AccelerationSaurabh Suman100% (1)
- 312H Project - FinalDocument39 pages312H Project - Finalpmd5102100% (3)
- 01 - Dispersion of A Free Non-Buoyant Fluid JetDocument5 pages01 - Dispersion of A Free Non-Buoyant Fluid JetJoren HuernoNo ratings yet
- PyTOUGH GuideDocument133 pagesPyTOUGH Guidesulavdkl100% (1)
- PdematDocument90 pagesPdematSounak SadhukhanNo ratings yet
- Neural Network For SSCV HydrodynamicsDocument104 pagesNeural Network For SSCV Hydrodynamicsvane-16No ratings yet
- 00 - Overview of The Move TutorialsDocument8 pages00 - Overview of The Move TutorialsBennibanassiNo ratings yet
- Cannon Strassen DNS AlgorithmDocument10 pagesCannon Strassen DNS AlgorithmKeshav BhutaniNo ratings yet
- AI&ML-FluidMech-Chapter ML Mendez 2020 LS OptDocument66 pagesAI&ML-FluidMech-Chapter ML Mendez 2020 LS OptlighthilljNo ratings yet
- Chapter 1 PDFDocument35 pagesChapter 1 PDFAreeba AshrafNo ratings yet
- Mathematical Methods NotesDocument432 pagesMathematical Methods NotesДимитър ПетровNo ratings yet
- H141Document19 pagesH141AleksandarNo ratings yet
- 2D Compressible Viscous-Flow Solver On Unstructured Meshes With Linear and Quadratic Reconstruction of Convective FluxesDocument77 pages2D Compressible Viscous-Flow Solver On Unstructured Meshes With Linear and Quadratic Reconstruction of Convective FluxeshityouNo ratings yet
- Matlab GADocument32 pagesMatlab GASusana De León AldacoNo ratings yet
- FlowMaster D80Document162 pagesFlowMaster D80alarihosNo ratings yet
- Non Imaging Optics DizertationDocument92 pagesNon Imaging Optics DizertationDanut Stanciu100% (1)
- Dell'Antonio Mathematics of Quantum Mechanjcs I PDFDocument466 pagesDell'Antonio Mathematics of Quantum Mechanjcs I PDFSolNo ratings yet
- VTU 2010 Scheme Electronics & Communication Engineering Syllabus PDFDocument112 pagesVTU 2010 Scheme Electronics & Communication Engineering Syllabus PDFVijay KumarNo ratings yet
- Mathemeatical Model of Glider TrajectoryDocument6 pagesMathemeatical Model of Glider TrajectoryAyanilNo ratings yet
- Algorithms of Scheduling Ac Landing ProblemDocument92 pagesAlgorithms of Scheduling Ac Landing ProblemschultzNo ratings yet
- Full Text 01Document108 pagesFull Text 01fluffa23No ratings yet
- A Multi-Dimensional Two-Phase Eulerian Model For Sediment Transport - TwoPhaseEulerSedFoam (Version 1.0)Document43 pagesA Multi-Dimensional Two-Phase Eulerian Model For Sediment Transport - TwoPhaseEulerSedFoam (Version 1.0)Boyuan YuNo ratings yet
- Mathemeatical Model of Glider TrajectoryDocument6 pagesMathemeatical Model of Glider TrajectoryAyanilNo ratings yet
- Anchor Blocks VB02 9Document6 pagesAnchor Blocks VB02 9AyanilNo ratings yet
- Asphalt 8 Car DataDocument65 pagesAsphalt 8 Car DataAyanilNo ratings yet
- Activation Code HytranDocument1 pageActivation Code HytranAyanilNo ratings yet
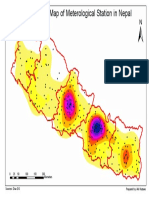
- Kernel Density Metrological Station NepalDocument1 pageKernel Density Metrological Station NepalAyanilNo ratings yet
- Anchor Blocks - VB02 - 9 PDFDocument6 pagesAnchor Blocks - VB02 - 9 PDFAyanilNo ratings yet
- Legend: Seti Karnali MahakaliDocument1 pageLegend: Seti Karnali MahakaliAyanilNo ratings yet
- Back To BasicsDocument4 pagesBack To BasicsAyanilNo ratings yet
- MM ConclusionDocument2 pagesMM ConclusionAyanilNo ratings yet
- Babai Surge Analysis 2016june DraftDocument7 pagesBabai Surge Analysis 2016june DraftAyanilNo ratings yet
- Urban Roads Standard 020215Document30 pagesUrban Roads Standard 020215AyanilNo ratings yet
- GIS ManualDocument60 pagesGIS ManualAyanilNo ratings yet
- Preliminary Design of Francis Turbine - 170927 - 1Document7 pagesPreliminary Design of Francis Turbine - 170927 - 1AyanilNo ratings yet
- 0 2 4 6 8 1 Kilometers: Prepared By: Anil KutuwoDocument1 page0 2 4 6 8 1 Kilometers: Prepared By: Anil KutuwoAyanilNo ratings yet
- Installation Procedure arcGIS.9.3 MaDocument3 pagesInstallation Procedure arcGIS.9.3 Majeewan_sanimaNo ratings yet
- DG Georeference LayoutDocument1 pageDG Georeference LayoutAyanilNo ratings yet
- DG - Project and Non Project Map - Nepal2Document1 pageDG - Project and Non Project Map - Nepal2AyanilNo ratings yet
- AutoCAD Land DesktopDocument13 pagesAutoCAD Land DesktopAyanilNo ratings yet
- HyTran Training Hill ChartDocument31 pagesHyTran Training Hill ChartAyanilNo ratings yet
- Nepal Budget 2071Document10 pagesNepal Budget 2071AyanilNo ratings yet
- Hydrology Tour III-IIDocument9 pagesHydrology Tour III-IIAyanilNo ratings yet
- Geo Tour To Malekhu ReportDocument33 pagesGeo Tour To Malekhu ReportAyanil67% (12)
- Empirical Design of Brick MasonryDocument10 pagesEmpirical Design of Brick MasonryAyanilNo ratings yet
- Your Company Name: 123 Main Street Suite #321 City, State 01234Document2 pagesYour Company Name: 123 Main Street Suite #321 City, State 01234AyanilNo ratings yet
- Hydraulic Design Structural Design Floor Design Detailed Drawings Solved ExampleDocument31 pagesHydraulic Design Structural Design Floor Design Detailed Drawings Solved ExampleAyanil100% (1)
- Irrigation Structures - 1Document13 pagesIrrigation Structures - 1lakumas15No ratings yet
- FabricationDocument36 pagesFabricationAyanilNo ratings yet
- Master ReportDocument42 pagesMaster ReportAyanilNo ratings yet
- What Is A Cam, r5, Dvdrip, DVDSCR, XvidDocument4 pagesWhat Is A Cam, r5, Dvdrip, DVDSCR, XvidAyanilNo ratings yet
- Key Influence Factors For Ocean Freight Forwarders Selecting Container Shipping Lines Using The Revised Dematel ApproachDocument12 pagesKey Influence Factors For Ocean Freight Forwarders Selecting Container Shipping Lines Using The Revised Dematel ApproachTanisha AgarwalNo ratings yet
- Changing Views of Tattoos in JapanDocument14 pagesChanging Views of Tattoos in JapanpanpapogNo ratings yet
- Health Education ProgramDocument4 pagesHealth Education ProgramZari Novela100% (1)
- Law 431 Course Outline (Aug 22-23)Document3 pagesLaw 431 Course Outline (Aug 22-23)Precious OmphithetseNo ratings yet
- Brahm Dutt v. UoiDocument3 pagesBrahm Dutt v. Uoiswati mohapatraNo ratings yet
- Anguyo Emmanuel Research ReportDocument51 pagesAnguyo Emmanuel Research ReportTendo PaulNo ratings yet
- System Design PrimerDocument60 pagesSystem Design PrimerPendyala SrinivasNo ratings yet
- Taoism: Michelle Azutea Lei Llabres Laurisse Anne Magpayo Juniel Tuazon Zaldy Bryan BajadaDocument26 pagesTaoism: Michelle Azutea Lei Llabres Laurisse Anne Magpayo Juniel Tuazon Zaldy Bryan Bajadana2than-1No ratings yet
- Schedule Standard and Syllabus: Section A: Geomorphology and Remote SensingDocument6 pagesSchedule Standard and Syllabus: Section A: Geomorphology and Remote SensingPankaj SharmaNo ratings yet
- Coordinate Vector: The Standard Representation ExamplesDocument4 pagesCoordinate Vector: The Standard Representation ExamplesAtikshaNo ratings yet
- Mendezona vs. OzamizDocument2 pagesMendezona vs. OzamizAlexis Von TeNo ratings yet
- The Relationship Between Emotional Intelligence and Job Performance of Myanmar School TeachersDocument16 pagesThe Relationship Between Emotional Intelligence and Job Performance of Myanmar School TeachersAmadeus Fernando M. PagenteNo ratings yet
- Knee Jerk Libertarianism by Frank Van DunnDocument9 pagesKnee Jerk Libertarianism by Frank Van DunnLuis Eduardo Mella GomezNo ratings yet
- Unit 9Document3 pagesUnit 9LexNo ratings yet
- The Oldest Man - Made Structures On EarthDocument5 pagesThe Oldest Man - Made Structures On EarthDoug Hoseck100% (1)
- Project (Ravi Saxena) 2 PDFDocument11 pagesProject (Ravi Saxena) 2 PDFVishal SaxenaNo ratings yet
- Data ListDocument239 pagesData Listpriyanka chithran100% (1)
- Synopss Orignal of Ambuja CementDocument25 pagesSynopss Orignal of Ambuja CementLovely Garima JainNo ratings yet
- MLB From 3G SideDocument16 pagesMLB From 3G Sidemalikst3No ratings yet
- 1903 Er19031211Document22 pages1903 Er19031211Tullio OpattiNo ratings yet
- Safety Awareness TrainingDocument20 pagesSafety Awareness TrainingPl nagappanNo ratings yet
- Full Download Test Bank For Microbiology The Human Experience First Edition First Edition PDF Full ChapterDocument36 pagesFull Download Test Bank For Microbiology The Human Experience First Edition First Edition PDF Full Chapterscalp.downcast.c7wgo100% (20)
- Systematic Survey On Smart Home Safety and Security Systems Using The Arduino PlatformDocument24 pagesSystematic Survey On Smart Home Safety and Security Systems Using The Arduino PlatformGeri MaeNo ratings yet
- Chemical Engineering Science: N. Ratkovich, P.R. Berube, I. NopensDocument15 pagesChemical Engineering Science: N. Ratkovich, P.R. Berube, I. Nopensvasumalhotra2001No ratings yet
- STaD 01 C 4Document4 pagesSTaD 01 C 4rogeraccuraNo ratings yet
- Tristan TateDocument3 pagesTristan Tatecelebritydecks1No ratings yet
- Form No. 61: (See Proviso To Clause (A) of Rule 114C (1) )Document1 pageForm No. 61: (See Proviso To Clause (A) of Rule 114C (1) )Vinayak BhatNo ratings yet
- HRA Strategic PlanDocument40 pagesHRA Strategic PlanjughomNo ratings yet
- TNR Evaluation RD 2Document7 pagesTNR Evaluation RD 2api-302840901No ratings yet
- (After The Reading of The Quote) : For The Entrance of The Philippine National Flag!Document4 pages(After The Reading of The Quote) : For The Entrance of The Philippine National Flag!JV DeeNo ratings yet
- Calculus Workbook For Dummies with Online PracticeFrom EverandCalculus Workbook For Dummies with Online PracticeRating: 3.5 out of 5 stars3.5/5 (8)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)From EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No ratings yet
- Mental Math Secrets - How To Be a Human CalculatorFrom EverandMental Math Secrets - How To Be a Human CalculatorRating: 5 out of 5 stars5/5 (3)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsFrom EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsRating: 3.5 out of 5 stars3.5/5 (9)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Transform Your 6-12 Math Class: Digital Age Tools to Spark LearningFrom EverandTransform Your 6-12 Math Class: Digital Age Tools to Spark LearningNo ratings yet
- A Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathFrom EverandA Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathRating: 5 out of 5 stars5/5 (1)
- Assessment Prep for Common Core Mathematics, Grade 6From EverandAssessment Prep for Common Core Mathematics, Grade 6Rating: 5 out of 5 stars5/5 (1)