You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Power House 1Document1 pagePower House 1ecsuperalNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Dao05 10 Cwa IrrDocument50 pagesDao05 10 Cwa IrrecsuperalNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Penstock ManualDocument159 pagesPenstock Manualstudent_bl95% (21)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Darcy WeisbachDocument11 pagesDarcy WeisbachSudip SardarNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Ambient Noise Level Std.Document1 pageAmbient Noise Level Std.ecsuperalNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Rubber Tires Racking SchemeDocument22 pagesRubber Tires Racking SchemeecsuperalNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Dam & DesanderDocument1 pageDam & DesanderecsuperalNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
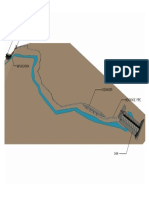
- Hydro Sample Site PlanDocument1 pageHydro Sample Site PlanecsuperalNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Power HouseDocument1 pagePower HouseecsuperalNo ratings yet
- WellpointDocument2 pagesWellpointecsuperalNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- DAO 2007-22 - Guidelines On The Requirements For Continuous Emission Monitoring Systems (CEMS) and Other Acceptable Protocols, Thereby Modifying and Clarifying Certain ProvisiDocument6 pagesDAO 2007-22 - Guidelines On The Requirements For Continuous Emission Monitoring Systems (CEMS) and Other Acceptable Protocols, Thereby Modifying and Clarifying Certain ProvisiPacific SpectrumNo ratings yet
- DAO 2007-22 - Guidelines On The Requirements For Continuous Emission Monitoring Systems (CEMS) and Other Acceptable Protocols, Thereby Modifying and Clarifying Certain ProvisiDocument6 pagesDAO 2007-22 - Guidelines On The Requirements For Continuous Emission Monitoring Systems (CEMS) and Other Acceptable Protocols, Thereby Modifying and Clarifying Certain ProvisiPacific SpectrumNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Dao05 10 Cwa IrrDocument50 pagesDao05 10 Cwa IrrecsuperalNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Carrier Optima (42CSH) - Wall MountedDocument8 pagesCarrier Optima (42CSH) - Wall MountedErwin Maldo50% (2)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- DAO 90-34 - Revised Water Usage and Classification Water Quality Criteria Amending Section Nos 68 and 69, Chapter III of The 1978 NPCC Rules and RegulationsDocument11 pagesDAO 90-34 - Revised Water Usage and Classification Water Quality Criteria Amending Section Nos 68 and 69, Chapter III of The 1978 NPCC Rules and RegulationsPacific Spectrum100% (4)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Env Dao 2000-81Document105 pagesEnv Dao 2000-81Francis Ruther IcaoNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Pressure Relief Valve Engineering HandbookDocument93 pagesPressure Relief Valve Engineering Handbookakrouti92% (12)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- Ambient Noise Level Std.Document1 pageAmbient Noise Level Std.ecsuperalNo ratings yet
- El STD08Document34 pagesEl STD08ecsuperalNo ratings yet
- Electrical Test Sheet: Standard For Combined Cycle Power PlantDocument26 pagesElectrical Test Sheet: Standard For Combined Cycle Power PlantecsuperalNo ratings yet
- Alstom HP 1103 PerformanceDocument2 pagesAlstom HP 1103 PerformanceecsuperalNo ratings yet
- ASTM B88 Copper TubesDocument3 pagesASTM B88 Copper TubesecsuperalNo ratings yet
- RSCDocument3 pagesRSCecsuperalNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Commissioning Test Results for Oil-Immersed TransformerDocument18 pagesCommissioning Test Results for Oil-Immersed TransformerecsuperalNo ratings yet
- BS4504 PN 16 Flange DimensionsDocument3 pagesBS4504 PN 16 Flange DimensionsecsuperalNo ratings yet
- Flocon Flange Tables GuideDocument5 pagesFlocon Flange Tables GuideAngel AngeleyeNo ratings yet
- FLANGE DIMENSIONS - DIN PN 6-40Document7 pagesFLANGE DIMENSIONS - DIN PN 6-40Dave DonohueNo ratings yet
- AC Induction Motor FundamentalsDocument24 pagesAC Induction Motor Fundamentalsrohtahir100% (3)
- Central Philippine University College of Engineering SECOND SEMESTER S.Y. 2005-2006 Work Term ReportDocument17 pagesCentral Philippine University College of Engineering SECOND SEMESTER S.Y. 2005-2006 Work Term ReportecsuperalNo ratings yet
- Air Preheater BasicsDocument1 pageAir Preheater Basics112dharmeshNo ratings yet
- Simple Arduino Inverter CircuitDocument11 pagesSimple Arduino Inverter CircuitPramillaNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Hybrid AC/DC Micro Grid: An Overview: October 2013Document7 pagesHybrid AC/DC Micro Grid: An Overview: October 2013Muhammad ImranNo ratings yet
- Reasons of Failures of CvtsDocument5 pagesReasons of Failures of CvtsLalit Kumar JainNo ratings yet
- Name: Faye Vong & Angel Tah Course: 3/ddwa Project:Pto/WecDocument24 pagesName: Faye Vong & Angel Tah Course: 3/ddwa Project:Pto/WecAngelTahNo ratings yet
- Esquemas y Planos Celdas MT PV Uyuni 8DAB-47925 - SwgGra - 20170125184905Document3 pagesEsquemas y Planos Celdas MT PV Uyuni 8DAB-47925 - SwgGra - 20170125184905Operaciones YJJNo ratings yet
- Electrical Safety Council - Best Practice Guide 4 Issue 4Document20 pagesElectrical Safety Council - Best Practice Guide 4 Issue 4kk128No ratings yet
- Distribution Connectors: Section DG Distribution Tools Series GP Fargo Connector WrenchesDocument28 pagesDistribution Connectors: Section DG Distribution Tools Series GP Fargo Connector WrenchesBenjamin HidalgoNo ratings yet
- A Narrative ReportDocument6 pagesA Narrative ReportKim Lamsen100% (1)
- Trouble Shooting For VRFDocument55 pagesTrouble Shooting For VRFFelixNo ratings yet
- 1 ITP For Gas Turbine AuxilliariesDocument10 pages1 ITP For Gas Turbine Auxilliariesvin ssNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Optimal Placement of Distribution Transformers in Radial Distribution SystemDocument7 pagesOptimal Placement of Distribution Transformers in Radial Distribution SystemJamali NagamoraNo ratings yet
- Distribution Business Unit Cummins Field Service Report Deccan Sales and Services Private Limited (Indore)Document2 pagesDistribution Business Unit Cummins Field Service Report Deccan Sales and Services Private Limited (Indore)Karthii AjuNo ratings yet
- HPS Indoor Site With Air-Condition Install GuideDocument40 pagesHPS Indoor Site With Air-Condition Install GuideErin Peter TaiNo ratings yet
- Data Separation Element Plv-Xxx-Pex: Description, ApplicationDocument1 pageData Separation Element Plv-Xxx-Pex: Description, ApplicationKenan KuloglijaNo ratings yet
- Syllabus:: Electrical Dept. Electrical Power III Dr. Omar AlazzawiDocument97 pagesSyllabus:: Electrical Dept. Electrical Power III Dr. Omar AlazzawiAkram KhasheaNo ratings yet
- JNTUH 3-2 R16 QP Power Systems Analysis May - 2019Document3 pagesJNTUH 3-2 R16 QP Power Systems Analysis May - 2019Kiran KunchamNo ratings yet
- Dual Feed Forward ControlDocument6 pagesDual Feed Forward ControlSanthosh KumarNo ratings yet
- B0505s PDFDocument3 pagesB0505s PDFloc78vnNo ratings yet
- 2 KVa Hybrid Solar System Smart SolarDocument11 pages2 KVa Hybrid Solar System Smart SolarST Home Appliance RepairsNo ratings yet
- lm2940 N PDFDocument35 pageslm2940 N PDFyovaniNo ratings yet
- Mobile Charging Circuit ConceptsDocument25 pagesMobile Charging Circuit ConceptsMustafa Kreet (ICT MAX)No ratings yet
- SG6105 Datasheet, Pinout, Application Circuits Power Supply Supervisor Regulator PWMDocument13 pagesSG6105 Datasheet, Pinout, Application Circuits Power Supply Supervisor Regulator PWMBeatrizEstevesNo ratings yet
- Installation guide for OT1000-1600EM electromagnetic contactorDocument8 pagesInstallation guide for OT1000-1600EM electromagnetic contactorDave ChaudhuryNo ratings yet
- Abb Active Harmonic FilterDocument2 pagesAbb Active Harmonic FilterARSAL 22231No ratings yet
- BEGA Price List 2023Document956 pagesBEGA Price List 2023James Ogunmola100% (1)
- SE10647 18th Edition A5 Flyer WebDocument6 pagesSE10647 18th Edition A5 Flyer WebSabri GünaydınNo ratings yet
- CM600HA-24H: Mitsubishi Igbt ModulesDocument4 pagesCM600HA-24H: Mitsubishi Igbt ModulesLODELBARRIO RDNo ratings yet
- SVT CableDocument1 pageSVT Cabletwo travellerNo ratings yet
- Atlas Copco Light Tower: A Bright Solution For Hard WorkDocument2 pagesAtlas Copco Light Tower: A Bright Solution For Hard Workantonio aravenaNo ratings yet
- 1291 90Document66 pages1291 90mayur dhandeNo ratings yet