You might also like
- Ag2015-20 20150511Document10 pagesAg2015-20 20150511sikander843562No ratings yet
- Course PC3, Dubai Applic Ation of Prote Ctive Relayi NG To Distri Bution and Sub-Trans Missi On Syste MsDocument41 pagesCourse PC3, Dubai Applic Ation of Prote Ctive Relayi NG To Distri Bution and Sub-Trans Missi On Syste MsMahmoud Al-QudahNo ratings yet
- Analysis and Application of Scott ConnectionDocument11 pagesAnalysis and Application of Scott ConnectionRam Uday MandalNo ratings yet
- Advance Power SystemsDocument88 pagesAdvance Power SystemsRachit KhannaNo ratings yet
- Circuit Daigrams and FormulasDocument12 pagesCircuit Daigrams and Formulasvish5936No ratings yet
- Three-Phase TransformersDocument42 pagesThree-Phase TransformersabhinavNo ratings yet
- Power System Analysis Lab1-LEYBOLD EQUIPMENT INSPECTION & TRANSIENT MEASUREMENTDocument15 pagesPower System Analysis Lab1-LEYBOLD EQUIPMENT INSPECTION & TRANSIENT MEASUREMENTMalith DeemanthaNo ratings yet
- Full Text Analysis of Power Flow of Nigerian 330kv Grid SystemDocument8 pagesFull Text Analysis of Power Flow of Nigerian 330kv Grid SystemOgunranti RasaqNo ratings yet
- 3 Phase TransformerDocument17 pages3 Phase TransformermdasifhassanapspdclNo ratings yet
- Parallel Operation of TransformersDocument10 pagesParallel Operation of TransformersMMK29100% (1)
- Summation of Alternating CurrentsDocument3 pagesSummation of Alternating Currentsalexns84No ratings yet
- Auto RecloserDocument16 pagesAuto RecloserMohammedHaythamNo ratings yet
- Projects Titles For Protection - W2017Document3 pagesProjects Titles For Protection - W2017Ahmad AbunassarNo ratings yet
- Protection of Radial FeederDocument9 pagesProtection of Radial FeederOnakeNo ratings yet
- MMLG 01-02-03 - 04 Manual GBDocument8 pagesMMLG 01-02-03 - 04 Manual GBethan625No ratings yet
- Relay Coordination Chapter3Document13 pagesRelay Coordination Chapter3Chân Gà NướngNo ratings yet
- Transformer Fault CurrentDocument4 pagesTransformer Fault CurrentaocalayNo ratings yet
- Arc Phenomena and Method of Arc Extinction in Air Circuit Breaker PDFDocument4 pagesArc Phenomena and Method of Arc Extinction in Air Circuit Breaker PDFHANRI ,No ratings yet
- Translay Commissioning Rail CorpDocument9 pagesTranslay Commissioning Rail CorpsmcraftNo ratings yet
- Fault Analysis: Kibrom GDocument37 pagesFault Analysis: Kibrom Gmillion100% (1)
- Interference of Power Line With Communication SystemDocument4 pagesInterference of Power Line With Communication SystemUsama Shafqat0% (1)
- FaultDocument27 pagesFaultግርማ ገ.No ratings yet
- Stub Bus PDFDocument1 pageStub Bus PDFpgcilNo ratings yet
- Ground Fault LocationDocument8 pagesGround Fault Locationzbyszko201234No ratings yet
- Impedance RelayDocument3 pagesImpedance Relayarjuna4306100% (1)
- DC MotorDocument15 pagesDC Motorptarwatkar123No ratings yet
- Capacitive Voltage Transformers CVT For HV MeasurementsDocument4 pagesCapacitive Voltage Transformers CVT For HV Measurementshossam_24_6_722542No ratings yet
- EE-452 - Power System Analysis - 2011Document44 pagesEE-452 - Power System Analysis - 2011eaf1No ratings yet
- Homework 09a-Solutions PDFDocument6 pagesHomework 09a-Solutions PDFld393563No ratings yet
- Over Voltage ProtectionDocument15 pagesOver Voltage ProtectionSridharan MNo ratings yet
- Parallel Con - For TransformersDocument6 pagesParallel Con - For Transformersmahmoud shalabiNo ratings yet
- Impulse GeneratorDocument3 pagesImpulse GeneratorTanmay RajeNo ratings yet
- Temporary Overvoltages Following Transformer EnergizingDocument3 pagesTemporary Overvoltages Following Transformer EnergizingLuiz_F_A_ViannaNo ratings yet
- Unit 1: The Power System Overview and ModelingDocument8 pagesUnit 1: The Power System Overview and ModelingIhuhwa Marta TauNo ratings yet
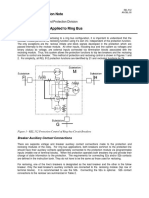
- Ring Bus Reclosing 20121217112215906Document6 pagesRing Bus Reclosing 20121217112215906Rick JordanNo ratings yet
- Polarity Checker User Manua: CPOL - Book Page 1 Thursday, December 13, 2007 10:07 AMDocument10 pagesPolarity Checker User Manua: CPOL - Book Page 1 Thursday, December 13, 2007 10:07 AMLéandre Ettekri NDRINo ratings yet
- Eee-V-dcmachines and Synchronous Machines (10ee54) - SolutionDocument73 pagesEee-V-dcmachines and Synchronous Machines (10ee54) - SolutionchaitanyaNo ratings yet
- AC Voltage ControllersDocument21 pagesAC Voltage ControllersgilmartNo ratings yet
- Resistencia ArcoDocument11 pagesResistencia ArcoLuis BriceñoNo ratings yet
- Chapter9 Unsymmetrical FaultsDocument53 pagesChapter9 Unsymmetrical Faultssuresh270No ratings yet
- VT Guard Pro - Technical ArticleDocument4 pagesVT Guard Pro - Technical ArticleAdemir DzanicNo ratings yet
- Radial Feeder ProtectionDocument26 pagesRadial Feeder ProtectionLeo GaghanNo ratings yet
- Power System Protection Presentation Dated 03-10-2013 Integrated Protection ControlDocument89 pagesPower System Protection Presentation Dated 03-10-2013 Integrated Protection ControlNagarajan GanesanNo ratings yet
- Transient Recovery VoltageDocument4 pagesTransient Recovery VoltageKanai BanerjeeNo ratings yet
- Detection of Fault Location in Transmission Line Using Internet of Things (Iot)Document3 pagesDetection of Fault Location in Transmission Line Using Internet of Things (Iot)Journal 4 ResearchNo ratings yet
- 2 Marks and 16 MarksDocument34 pages2 Marks and 16 Marksanandarao7362No ratings yet
- Distance Protection System in RailwayDocument5 pagesDistance Protection System in RailwaypavanNo ratings yet
- (Elearnica - Ir) - Ground Distance Relay Compensation Based On Fault Resistance CADocument6 pages(Elearnica - Ir) - Ground Distance Relay Compensation Based On Fault Resistance CAAnonymous 9VcxlFErfNo ratings yet
- Power System Protection Part - 1 DR - Prof.Mohammed TawfeeqDocument59 pagesPower System Protection Part - 1 DR - Prof.Mohammed TawfeeqEngr Zia UR RehmanNo ratings yet
- EEE 465 - PPT - 3Document12 pagesEEE 465 - PPT - 3Md IbtidaNo ratings yet
- Chapter05 - Temporary Overvoltages Analysis PDFDocument19 pagesChapter05 - Temporary Overvoltages Analysis PDFEleazar Sierra Espinoza100% (1)
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- 6628 LocatingFaults ES 20140210 WebDocument18 pages6628 LocatingFaults ES 20140210 WebapofviewNo ratings yet
- Review On Travelling WaveDocument4 pagesReview On Travelling WaveaiswaryaNo ratings yet
- ANSI Codes PDFDocument3 pagesANSI Codes PDFelectrical_1012000100% (2)
- Pertadex English PDFDocument8 pagesPertadex English PDFSuginoMarwotoNo ratings yet
- Theory and Technology of Instrument Transformers: Training Booklet: 2Document48 pagesTheory and Technology of Instrument Transformers: Training Booklet: 2Xabi AlonsoNo ratings yet
- Travelling Wave Based Fault Location For Teed CircuitsDocument7 pagesTravelling Wave Based Fault Location For Teed CircuitsSuginoMarwotoNo ratings yet
- A Method of Line Fault Location Based On Traveling Wave TheoryDocument10 pagesA Method of Line Fault Location Based On Traveling Wave TheorySuginoMarwotoNo ratings yet
- Travelling Wave Fault Location in HV LinesDocument8 pagesTravelling Wave Fault Location in HV LinesSuginoMarwotoNo ratings yet
- Detecting The Fault Location Using Traveling WaveDocument4 pagesDetecting The Fault Location Using Traveling WaveSuginoMarwotoNo ratings yet
- EPPS Lembar JawabDocument1 pageEPPS Lembar JawabSuginoMarwotoNo ratings yet
- Cloud DefinisiDocument7 pagesCloud DefinisiCandra AnantaNo ratings yet
- Cover Letter 2 PDFDocument1 pageCover Letter 2 PDFSuginoMarwotoNo ratings yet
- Your Name Your Street Address City, State, ZipDocument1 pageYour Name Your Street Address City, State, ZipSuginoMarwotoNo ratings yet
- Cover Letter 4Document1 pageCover Letter 4SuginoMarwotoNo ratings yet
- Universal Declaration of Human RightsDocument8 pagesUniversal Declaration of Human RightselectedwessNo ratings yet
- Your Name Your Street Address City, State, ZipDocument1 pageYour Name Your Street Address City, State, ZipSuginoMarwotoNo ratings yet
- Etong Ini TentangDocument6 pagesEtong Ini TentangSuginoMarwotoNo ratings yet
- Bme 421Document3 pagesBme 421SuginoMarwotoNo ratings yet
- Engineering Cover LetterDocument2 pagesEngineering Cover Letter^passwordNo ratings yet
- 212241Document6 pages212241karasa1No ratings yet
- Electronic Tongue ResearchDocument6 pagesElectronic Tongue ResearchSuginoMarwotoNo ratings yet
- Sempak Ku JebolDocument10 pagesSempak Ku JebolSuginoMarwotoNo ratings yet
- Electronic Nose Based On Metal Oxide Semiconductor Sensors As An Alternative Technique For The Spoilage Classification of Red MeatDocument15 pagesElectronic Nose Based On Metal Oxide Semiconductor Sensors As An Alternative Technique For The Spoilage Classification of Red MeatSuginoMarwotoNo ratings yet
- Enose RepeatabilityDocument4 pagesEnose RepeatabilitySuginoMarwotoNo ratings yet
- On The Study of Feature Extraction Methods For An Electronic NoseDocument15 pagesOn The Study of Feature Extraction Methods For An Electronic NoseSuginoMarwotoNo ratings yet
- Repeatability and Reproducibility of ExperimentDocument5 pagesRepeatability and Reproducibility of ExperimentSuginoMarwotoNo ratings yet
- Feature Extraction From Sensor Data For Wound Pathogen Detection Based On Electronic Nose PDFDocument17 pagesFeature Extraction From Sensor Data For Wound Pathogen Detection Based On Electronic Nose PDFSuginoMarwotoNo ratings yet
- Fuso - J Breath Res 2013Document9 pagesFuso - J Breath Res 2013SuginoMarwotoNo ratings yet
- Feature Extraction From Sensor Data For Wound Pathogen Detection Based On Electronic Nose PDFDocument17 pagesFeature Extraction From Sensor Data For Wound Pathogen Detection Based On Electronic Nose PDFSuginoMarwotoNo ratings yet
- Analysis of Pork Adulteration in Minced Mutton Using Electronic Nose of Metal Exide SensorsDocument6 pagesAnalysis of Pork Adulteration in Minced Mutton Using Electronic Nose of Metal Exide SensorsSuginoMarwotoNo ratings yet
- Discrimination and Prediction of Multiple Beef Freshness Indexes Based On Electronic NoseDocument9 pagesDiscrimination and Prediction of Multiple Beef Freshness Indexes Based On Electronic NoseSuginoMarwotoNo ratings yet
- Cambridge-Audio Azur 640t-V2 Service enDocument22 pagesCambridge-Audio Azur 640t-V2 Service enChris YorkNo ratings yet
- Aec3 PDFDocument114 pagesAec3 PDFSreeram VijapurapuNo ratings yet
- HTAMDocument30 pagesHTAMniteshtripathi_jobs100% (1)
- Comtech CatalogDocument11 pagesComtech CatalogFaryal AuroojNo ratings yet
- Fuji-FRENIC-Lift LM2-Reference-Manual-INR-SI47-1909-E - Lift (LM2) - RM (E) - English PDFDocument246 pagesFuji-FRENIC-Lift LM2-Reference-Manual-INR-SI47-1909-E - Lift (LM2) - RM (E) - English PDFNaeem HussainNo ratings yet
- WaveguidesDocument18 pagesWaveguidesbnatarajNo ratings yet
- Tutorial Active HDLDocument19 pagesTutorial Active HDLMEBM80No ratings yet
- Vector ComputersDocument43 pagesVector ComputersVikas MishraNo ratings yet
- Physics Project WorkDocument15 pagesPhysics Project WorkSidhant KaushikNo ratings yet
- ABB HighPowerSemiconductorsProductCatalogue2013 PDFDocument36 pagesABB HighPowerSemiconductorsProductCatalogue2013 PDFPopovici Paul100% (1)
- Advanced Digital Signal ProcessingDocument125 pagesAdvanced Digital Signal ProcessingJaopinzz UncNo ratings yet
- Ad146 ManualDocument38 pagesAd146 ManualCharityNo ratings yet
- Inversor Abb 3kwDocument4 pagesInversor Abb 3kwapi-290643326No ratings yet
- DocumentDocument11 pagesDocumentrakesh hiremathNo ratings yet
- Cmos Metal GateDocument56 pagesCmos Metal GateSubin AlexNo ratings yet
- Mxa710 Spec Sheet Letter enDocument2 pagesMxa710 Spec Sheet Letter enBobNo ratings yet
- MasterCAN Display 35 - оperation - manual - v - 3.1Document65 pagesMasterCAN Display 35 - оperation - manual - v - 3.1Jeg RamirezNo ratings yet
- Notice Installation Vulca Voice EngDocument38 pagesNotice Installation Vulca Voice EngJessica MathisNo ratings yet
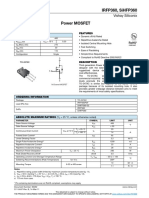
- Irfp360, Sihfp360: Vishay SiliconixDocument9 pagesIrfp360, Sihfp360: Vishay SiliconixCristian AlexanderNo ratings yet
- APP-1 User Manual V2CDocument10 pagesAPP-1 User Manual V2CelgauchoandresNo ratings yet
- Hix 56xx PDFDocument10 pagesHix 56xx PDFMohsine AzouliNo ratings yet
- M4097 Service GuideDocument159 pagesM4097 Service GuideMrScollinsNo ratings yet
- ZTE Cours 1Document37 pagesZTE Cours 1Mohammad AslamNo ratings yet
- Compensators - ControllersDocument22 pagesCompensators - ControllersPrasanth Kumar0% (1)
- Machine Architecture 14 Cache Memory Principles Elements of Cache DesignDocument34 pagesMachine Architecture 14 Cache Memory Principles Elements of Cache DesignAbul Asar Sayyad100% (1)
- BSR Troubleshooting GuideDocument144 pagesBSR Troubleshooting GuideImre Laszlo LorandNo ratings yet
- FAN7382 Half-Bridge Gate Driver: Features DescriptionDocument14 pagesFAN7382 Half-Bridge Gate Driver: Features DescriptionEriflonaNo ratings yet
- Datasheet 24c64 24c32 PDFDocument26 pagesDatasheet 24c64 24c32 PDFLuix TiradoNo ratings yet
- Ad10253 FTTH PrimerDocument7 pagesAd10253 FTTH PrimerWewe SlmNo ratings yet
- GSM Frame Structure-Finalwith GraphsDocument28 pagesGSM Frame Structure-Finalwith GraphsMohammed Fabin100% (1)