You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- ECE 445 - Optical Fiber Communications Lecture 01 - IntroductionDocument31 pagesECE 445 - Optical Fiber Communications Lecture 01 - IntroductionAuliaNo ratings yet
- 364 721 1 SM PDFDocument10 pages364 721 1 SM PDFAuliaNo ratings yet
- The Infrared Temperature Sensor Appears To Be Rather StraightforwardDocument7 pagesThe Infrared Temperature Sensor Appears To Be Rather StraightforwardAuliaNo ratings yet
- Dayton1310666985 PDFDocument127 pagesDayton1310666985 PDFAuliaNo ratings yet
- 2009 Schmidt CameraDocument4 pages2009 Schmidt CameraAuliaNo ratings yet
- Week 11Document12 pagesWeek 11lduran_63No ratings yet
- 1.B.04 Ventilation PDFDocument3 pages1.B.04 Ventilation PDFAuliaNo ratings yet
- Magnetic Properties of Materials: - Ferromagnetic: Material With A Permanent Magnetic DipoleDocument25 pagesMagnetic Properties of Materials: - Ferromagnetic: Material With A Permanent Magnetic DipoleAuliaNo ratings yet
- 50Document7 pages50Vivek VikuNo ratings yet
- Bab Ii Tinjauan Pustaka 2.1 Optika GeometriDocument15 pagesBab Ii Tinjauan Pustaka 2.1 Optika GeometriAuliaNo ratings yet
- 50Document7 pages50Vivek VikuNo ratings yet
- Ggol 1Document3 pagesGgol 1AuliaNo ratings yet
- Disturbance Rejection Through LPV Gain-Scheduling Control With Application To Active Noise CancellationDocument6 pagesDisturbance Rejection Through LPV Gain-Scheduling Control With Application To Active Noise CancellationAuliaNo ratings yet
- 1.B.04 Ventilation PDFDocument3 pages1.B.04 Ventilation PDFAuliaNo ratings yet
- 1.B.04 Ventilation PDFDocument3 pages1.B.04 Ventilation PDFAuliaNo ratings yet
- 110 217 1 SMDocument14 pages110 217 1 SMAuliaNo ratings yet
- 3571 PDFDocument4 pages3571 PDFAuliaNo ratings yet
- AbstractDocument1 pageAbstractAuliaNo ratings yet
- Design & Implementation of Controller Based Buck-Boost Converter For Small Wind TurbineDocument7 pagesDesign & Implementation of Controller Based Buck-Boost Converter For Small Wind TurbineIOSRjournalNo ratings yet
- I LaplaceDocument5 pagesI LaplaceElikana NyaruhimaNo ratings yet
- Experiment 6 Protected PDFDocument10 pagesExperiment 6 Protected PDFSkr KhanNo ratings yet
- Intertubes: A Study of The Us Long-Haul Fiber-Optic InfrastructureDocument14 pagesIntertubes: A Study of The Us Long-Haul Fiber-Optic InfrastructureAuliaNo ratings yet
- Design & Implementation of Controller Based Buck-Boost Converter For Small Wind TurbineDocument7 pagesDesign & Implementation of Controller Based Buck-Boost Converter For Small Wind TurbineIOSRjournalNo ratings yet
- Lithium-Ion Battery: Data SheetDocument10 pagesLithium-Ion Battery: Data SheetAuliaNo ratings yet
- Daftar Pustaka Paiton Private Power Project Phase IIDocument1 pageDaftar Pustaka Paiton Private Power Project Phase IIAuliaNo ratings yet
- 3M Sound Level Meter 1100 en 2100Document24 pages3M Sound Level Meter 1100 en 2100BetmenNo ratings yet
- 3M Sound Level Meter 1100 en 2100Document24 pages3M Sound Level Meter 1100 en 2100BetmenNo ratings yet
- 123Document1 page123AuliaNo ratings yet
- Aluminium Gallium Arsenide SemiconductorsDocument3 pagesAluminium Gallium Arsenide SemiconductorsAulia100% (1)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Methane Steam ReformingDocument29 pagesMethane Steam Reformingnganphap67% (6)
- CAT Diesel ManualsDocument21 pagesCAT Diesel Manualsaaguilarm100% (1)
- 2 66kV Isolator R3 Jan13Document33 pages2 66kV Isolator R3 Jan13akhilesh205No ratings yet
- GSI Brief HisDocument73 pagesGSI Brief HisSimhachalam TerliNo ratings yet
- Act 1 Microscope As A Biological ToolDocument14 pagesAct 1 Microscope As A Biological ToolSidNo ratings yet
- 31-01-2022 - JR Iit Co SC N120 - Jee Main Model QP FinalDocument14 pages31-01-2022 - JR Iit Co SC N120 - Jee Main Model QP FinalUjib DamianNo ratings yet
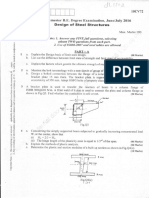
- Design of Steel Structures Exam QuestionsDocument2 pagesDesign of Steel Structures Exam QuestionskarthiksampNo ratings yet
- B.E. (Mech. S/W) (2003 Course) (402065) : Production Management (Elective - Iii)Document82 pagesB.E. (Mech. S/W) (2003 Course) (402065) : Production Management (Elective - Iii)Rameez BedekarNo ratings yet
- Concise Chapterwise Class XII Revision NotesDocument15 pagesConcise Chapterwise Class XII Revision Notespc 11No ratings yet
- Percentage CalculatorDocument4 pagesPercentage Calculatorapi-162641823No ratings yet
- Oferta Vda Hard MetalDocument10 pagesOferta Vda Hard Metaldavinci0No ratings yet
- Nippon Steel & Sumikin Engineering's Blast FurnaceDocument4 pagesNippon Steel & Sumikin Engineering's Blast Furnacekalai100% (1)
- Since 1940: General CatalogDocument32 pagesSince 1940: General CatalogFernanda ContursiNo ratings yet
- Reel Capacity Calculation GuideDocument1 pageReel Capacity Calculation GuideAmalita CementoNo ratings yet
- Perception - An Introduction To The Gestalt-Theorie Kurt Koffka (1922)Document30 pagesPerception - An Introduction To The Gestalt-Theorie Kurt Koffka (1922)evalsegaNo ratings yet
- SAE Measurement j1287 - 199807Document7 pagesSAE Measurement j1287 - 199807Sport moteurNo ratings yet
- Scour at Offshore StructuresDocument11 pagesScour at Offshore Structureshamid sobirin100% (1)
- Mii 2012 0102Document44 pagesMii 2012 0102asblueskyNo ratings yet
- WORK - AND - MOTIVATION - Victor Vroom PDFDocument328 pagesWORK - AND - MOTIVATION - Victor Vroom PDFIsadora Tavares86% (21)
- Field Oriented Control with DC Link Disturbance RejectionDocument7 pagesField Oriented Control with DC Link Disturbance RejectionKUNDANLANSNo ratings yet
- Gear and Screw Thread MetrologyDocument34 pagesGear and Screw Thread Metrologykunj ranaNo ratings yet
- Introduction To Disturbance Rejection ControlDocument5 pagesIntroduction To Disturbance Rejection ControlShamsMohdNo ratings yet
- HW4 SolutionsDocument7 pagesHW4 SolutionserfanghlmNo ratings yet
- Bosch/Electro-Voice Ceiling Speaker Placement CalculatorDocument6 pagesBosch/Electro-Voice Ceiling Speaker Placement CalculatorKp SatishNo ratings yet
- Vibration Control by Piezoelectric Materials: A Review: AbstractDocument5 pagesVibration Control by Piezoelectric Materials: A Review: AbstractJai KumarNo ratings yet
- Physics ProjectDocument11 pagesPhysics ProjectArushi Sharma88% (8)
- 4024 s10 QP 13Document20 pages4024 s10 QP 13mstudy1234560% (1)
- CE Board Nov 2021 - Geotechnical Engineering - Set 5Document2 pagesCE Board Nov 2021 - Geotechnical Engineering - Set 5Lemuel TeopeNo ratings yet
- MIND SM en Servicemanual VS800 h39439-31 enDocument70 pagesMIND SM en Servicemanual VS800 h39439-31 enashfaqNo ratings yet
- Document 00Document9 pagesDocument 00Anonymous P2RUSMdchRNo ratings yet