You might also like
- Event 420972 8Document13 pagesEvent 420972 8Astin R. MartinezNo ratings yet
- 17 - 12 - 7) Alarm Code Ver VDocument8 pages17 - 12 - 7) Alarm Code Ver VAstin R. MartinezNo ratings yet
- DFIU 330079-3 Temp y EventoDocument4 pagesDFIU 330079-3 Temp y EventoAstin R. MartinezNo ratings yet
- CB10T022 Procedure of Controller Replacement PDFDocument15 pagesCB10T022 Procedure of Controller Replacement PDFAstin R. MartinezNo ratings yet
- 330079-3 Temp y Evento Pulldown A 20FDocument3 pages330079-3 Temp y Evento Pulldown A 20FAstin R. MartinezNo ratings yet
- 17 - 12 - 2) Piping Layout & Service Port Use Ver VDocument6 pages17 - 12 - 2) Piping Layout & Service Port Use Ver VAstin R. MartinezNo ratings yet
- Event 420972 8Document13 pagesEvent 420972 8Astin R. MartinezNo ratings yet
- EventDocument142 pagesEventAstin R. MartinezNo ratings yet
- Temp 420972 8Document1 pageTemp 420972 8Astin R. MartinezNo ratings yet
- TempDocument12 pagesTempAstin R. MartinezNo ratings yet
- EventDocument18 pagesEventAstin R. MartinezNo ratings yet
- 4 Component Flow 551Document7 pages4 Component Flow 551Astin R. MartinezNo ratings yet
- Pti 420972 8Document2 pagesPti 420972 8Astin R. MartinezNo ratings yet
- PtiDocument2 pagesPtiAstin R. MartinezNo ratings yet
- Digital Ic ListDocument24 pagesDigital Ic ListCosmin PavelNo ratings yet
- Pti 420972 8Document2 pagesPti 420972 8Astin R. MartinezNo ratings yet
- Temp 420972 8Document1 pageTemp 420972 8Astin R. MartinezNo ratings yet
- LicenseDocument1 pageLicenseAstin R. MartinezNo ratings yet
- Event 4205466Document23 pagesEvent 4205466Astin R. MartinezNo ratings yet
- Event 4205466Document18 pagesEvent 4205466Astin R. MartinezNo ratings yet
- Refrigerant Flow NT 551Document4 pagesRefrigerant Flow NT 551Astin R. MartinezNo ratings yet
- 2003 ML3 Controller PDFDocument10 pages2003 ML3 Controller PDFAstin R. MartinezNo ratings yet
- Adafruit 16 Channel Servo Driver With Raspberry PiDocument11 pagesAdafruit 16 Channel Servo Driver With Raspberry PiAstin R. MartinezNo ratings yet
- Temp 420972 8Document1 pageTemp 420972 8Astin R. MartinezNo ratings yet
- Tempbase D Manual V5.1 enDocument14 pagesTempbase D Manual V5.1 enAstin R. MartinezNo ratings yet
- Tempbase D Manual V5.1 enDocument14 pagesTempbase D Manual V5.1 enAstin R. MartinezNo ratings yet
- Dfiu 331504-7 Repairs (Recobro) Send Approved LastDocument7 pagesDfiu 331504-7 Repairs (Recobro) Send Approved LastAstin R. MartinezNo ratings yet
- Cxru 122085-4 Repairs Send Approved LastDocument10 pagesCxru 122085-4 Repairs Send Approved LastAstin R. MartinezNo ratings yet
- Dfiu 215110-2 Repairs Send Approved LastDocument10 pagesDfiu 215110-2 Repairs Send Approved LastAstin R. MartinezNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Tales of Dunk and EggDocument4 pagesTales of Dunk and EggRajneeshBhardwaj0% (1)
- Kingdom of Shadows, Gorky, 1896Document3 pagesKingdom of Shadows, Gorky, 1896emijlinNo ratings yet
- Test Bank For Introductory Statistics Exploring The World Through Data 0321891937Document37 pagesTest Bank For Introductory Statistics Exploring The World Through Data 0321891937petaledrevealer155f100% (13)
- Etude "Sincerity": Allegro ModeratoDocument2 pagesEtude "Sincerity": Allegro ModeratoAlin MariţaNo ratings yet
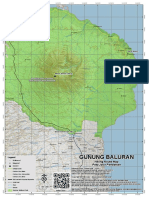
- Peta Jalur Pendakian Gunung BaluranDocument1 pagePeta Jalur Pendakian Gunung BaluranKindi SienaNo ratings yet
- Blues BrosDocument14 pagesBlues Brossandrovergara100% (4)
- Assignment Cover Sheet: Electrical and Computer EngineeringDocument4 pagesAssignment Cover Sheet: Electrical and Computer EngineeringSyahril AmirNo ratings yet
- Hopscotch 6 End-Of-Term 1 TestDocument4 pagesHopscotch 6 End-Of-Term 1 Testoradu1395100% (1)
- OPT Placement TestDocument8 pagesOPT Placement TestTrang Nhung100% (1)
- 4CH HDMI To ISDB-T Encoder Modulator User's Manual PDFDocument28 pages4CH HDMI To ISDB-T Encoder Modulator User's Manual PDFVladimir PeñarandaNo ratings yet
- Navedtra 14088Document214 pagesNavedtra 14088gotlove7100% (1)
- ZXHN H108N User ManualDocument20 pagesZXHN H108N User ManualMahmoud El-abdNo ratings yet
- Othello Qs 2012Document4 pagesOthello Qs 2012ginabobina3337238No ratings yet
- Fracture From The King Crimson)Document16 pagesFracture From The King Crimson)Dave ToddNo ratings yet
- Trust His Heart ChordsDocument1 pageTrust His Heart ChordsMarilen De Leon Ebrada100% (2)
- Simple Present Test PDFDocument2 pagesSimple Present Test PDFkiritosamaNo ratings yet
- (Clarinet Institute) Gade Fantasiestucke CL PnoDocument27 pages(Clarinet Institute) Gade Fantasiestucke CL PnoRuben JacintoNo ratings yet
- Coolaudio V2181 DatasheetDocument8 pagesCoolaudio V2181 DatasheetcrackintheshatNo ratings yet
- R Rec BT.656 5 200712 I!!pdf eDocument16 pagesR Rec BT.656 5 200712 I!!pdf eRenzo SattiNo ratings yet
- Year 7 Maths Specimen Paper 1 PDFDocument9 pagesYear 7 Maths Specimen Paper 1 PDFKirsten RegadasNo ratings yet
- 8.º Ano Testes Inglês - Manual Move OnDocument18 pages8.º Ano Testes Inglês - Manual Move OnFabiSandro Martins67% (3)
- Sanguinetti Realization of PartimentiDocument34 pagesSanguinetti Realization of PartimentiCousaCousaNo ratings yet
- La CucarachaDocument2 pagesLa CucarachaGino R. MonteloyolaNo ratings yet
- Module in Art AppreciationDocument29 pagesModule in Art AppreciationJoebelle Senador100% (2)
- Detailed Lesson PlanDocument4 pagesDetailed Lesson PlanAntonetteNo ratings yet
- 01 - Full Score - Jag VäntarDocument2 pages01 - Full Score - Jag VäntarMarkzillaNo ratings yet
- Microstrip Antennas PDFDocument85 pagesMicrostrip Antennas PDFKeviinCarrillo100% (1)
- Takemitsu and The Lydian Chromatic Concept of George RussellDocument39 pagesTakemitsu and The Lydian Chromatic Concept of George RussellMile GluvacevicNo ratings yet
- Shannon High-Bassalik Suit Against Al Jazeera AmericaDocument26 pagesShannon High-Bassalik Suit Against Al Jazeera AmericamlcalderoneNo ratings yet
- Realizing Lucier and Stockhausen: Case Studies in Electroacoustic Performance PracticeDocument4 pagesRealizing Lucier and Stockhausen: Case Studies in Electroacoustic Performance PracticescrewscribbedNo ratings yet