You might also like
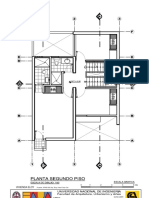
- 02 - Casa Eloy Basico - Planta 2do PisoDocument1 page02 - Casa Eloy Basico - Planta 2do PisoalexNo ratings yet
- 04 - Casa Eloy Basico - Planta TechoDocument1 page04 - Casa Eloy Basico - Planta TechoalexNo ratings yet
- Compu 3Document1 pageCompu 3alexNo ratings yet
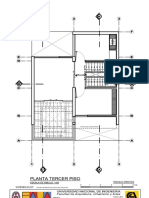
- 03 - Casa Eloy Basico - Planta 3er PisoDocument1 page03 - Casa Eloy Basico - Planta 3er PisoalexNo ratings yet
- Articulo de OpinionDocument1 pageArticulo de OpinionalexNo ratings yet
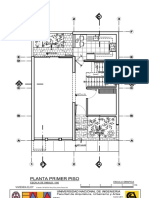
- 01 - Casa Eloy Basico - Planta 1er PisoDocument1 page01 - Casa Eloy Basico - Planta 1er PisoalexNo ratings yet
- Analisis Estatico de Estructuras Por El Metodo MatricialDocument169 pagesAnalisis Estatico de Estructuras Por El Metodo MatricialSebastian TobonNo ratings yet
- 03 Principio de Los Trabajos VirtualesDocument20 pages03 Principio de Los Trabajos Virtualeslromero223No ratings yet
- Fisica. PresentacionDocument24 pagesFisica. PresentacionrealmadridcampeonNo ratings yet
- Lluvia-Acida Alejandromanuel 3aDocument26 pagesLluvia-Acida Alejandromanuel 3aalexNo ratings yet
- ESFUERZOS COMBINADOS - PPSXDocument32 pagesESFUERZOS COMBINADOS - PPSXalexNo ratings yet
- 05ecuacion Generalizada Circulo de MohrDocument16 pages05ecuacion Generalizada Circulo de MohralexNo ratings yet
- 05ecuacion Generalizada Circulo de MohrDocument16 pages05ecuacion Generalizada Circulo de MohralexNo ratings yet
- Círculo de MohrDocument19 pagesCírculo de MohrErik VillegasNo ratings yet
- Farmacologia Aplicada A La EnfermeríaDocument16 pagesFarmacologia Aplicada A La EnfermeríaNikol Oroz riveraNo ratings yet
- Estudio de CasosDocument11 pagesEstudio de CasosJosé MarteNo ratings yet
- Entrenamiento SV8100 (In-Mail) (LASC)Document26 pagesEntrenamiento SV8100 (In-Mail) (LASC)Jose LibrosNo ratings yet
- Ácido AcetilsalicílicoDocument2 pagesÁcido AcetilsalicílicoGerson ChávezNo ratings yet
- Carta Declaracion JuradaDocument2 pagesCarta Declaracion JuradaJuan Carlos Carrasco GarciaNo ratings yet
- 1.0. Memoria Descriptiva AcobambaDocument34 pages1.0. Memoria Descriptiva AcobambaEvelyn Jesus RiosNo ratings yet
- Tercer Informe de Ptap-UnpDocument7 pagesTercer Informe de Ptap-UnpSharon PasacheNo ratings yet
- VEREDASDocument8 pagesVEREDASkharlhitha_17No ratings yet
- SSE 7 SECUNDARIA - Educación FísicaDocument8 pagesSSE 7 SECUNDARIA - Educación FísicasebastianNo ratings yet
- Autorización para Examenes MédicosDocument1 pageAutorización para Examenes MédicosFelix AlorNo ratings yet
- LAB 11 ZavaletaDocument8 pagesLAB 11 ZavaletaRoberto Carlos Zavaleta CrispinNo ratings yet
- Unidad 3 El Emprendedor y La InnovacionDocument12 pagesUnidad 3 El Emprendedor y La InnovacionJuan Francisco Martinez100% (1)
- Bases2 - C09 - Triggers Sinonimos SecuenciasDocument16 pagesBases2 - C09 - Triggers Sinonimos SecuenciasCRISTIAN YESID GAMBOA MACIASNo ratings yet
- Caso Rosewood Hotels Lurie NicolasDocument5 pagesCaso Rosewood Hotels Lurie NicolasMaria Segura IbañezNo ratings yet
- Grupo 6Document32 pagesGrupo 6Javier Lanazca TorreNo ratings yet
- Encargo N°1 Costo Vero y YeimyDocument11 pagesEncargo N°1 Costo Vero y Yeimyyeimy antileoNo ratings yet
- p72b Pc1 Hidráulica de CanalesDocument2 pagesp72b Pc1 Hidráulica de CanalesRebeca SalazarNo ratings yet
- Plan de Contingencia Por Navidad 2018-2019Document18 pagesPlan de Contingencia Por Navidad 2018-2019Julio Sebastián QuispeNo ratings yet
- Censo Electoral Estudiantes PDFDocument300 pagesCenso Electoral Estudiantes PDFEsteban LealNo ratings yet
- Lecl U3 Ea RuraDocument6 pagesLecl U3 Ea RuraAndres RodriguezNo ratings yet
- Guía Docente Curso: 2022/23: 40051 - Historia Antigua Universal IDocument8 pagesGuía Docente Curso: 2022/23: 40051 - Historia Antigua Universal IJose RamonNo ratings yet
- Matrices Ambito EmpresarialDocument23 pagesMatrices Ambito EmpresarialJanny Andrea Beltran NaizirNo ratings yet
- HDS Jotun Thinner N°17Document11 pagesHDS Jotun Thinner N°17Karla Muñoz NavarreteNo ratings yet
- Catalogo Cube4Document12 pagesCatalogo Cube4Ricardo Limaymanta TicseNo ratings yet
- Parroquia NorteDocument4 pagesParroquia NorteBrayan JimenezNo ratings yet
- No Conformidades-2 VS SI CONFORMIDADESDocument6 pagesNo Conformidades-2 VS SI CONFORMIDADESPaolo LinaresNo ratings yet
- Obra Completa Vol. 18.1. - La Vida Simbólica I (Carl Gustav Jung)Document448 pagesObra Completa Vol. 18.1. - La Vida Simbólica I (Carl Gustav Jung)tedioNo ratings yet
- Presentacion FCTDocument15 pagesPresentacion FCTCARLOSNo ratings yet
- Presentación El Cantar de Mio Cid PDFDocument13 pagesPresentación El Cantar de Mio Cid PDFCarla Flores SagüésNo ratings yet