You might also like
- 50 Materiales de ConstrucciónDocument6 pages50 Materiales de ConstrucciónJuan Torres60% (5)
- Problema de Integrales Triples Aplicado en La Teoería ElectromagnéticaDocument4 pagesProblema de Integrales Triples Aplicado en La Teoería ElectromagnéticaMartín FalcónNo ratings yet
- MONOGRAFIADocument10 pagesMONOGRAFIAMiguel Gerardino Beraun RiveraNo ratings yet
- MatricesDocument70 pagesMatricesCarmen72350% (4)
- TAREA 2. Vectores, Matrices y DeterminantesDocument13 pagesTAREA 2. Vectores, Matrices y DeterminantesSebastián100% (1)
- Formas BilinealesDocument15 pagesFormas BilinealesAndres RiveraNo ratings yet
- 4.1 El Espacio Dual de Un Espacio VectorialDocument11 pages4.1 El Espacio Dual de Un Espacio VectorialJavier Diaz100% (1)
- Trabajo de Investigación Formativa IIDocument7 pagesTrabajo de Investigación Formativa IIMh MagnoNo ratings yet
- VyVP Fing-2Document100 pagesVyVP Fing-2antonela nogueiraNo ratings yet
- Tema4 TensoresDocument21 pagesTema4 TensoresCony LepeNo ratings yet
- Formas BilinealesDocument15 pagesFormas BilinealesPANDANo ratings yet
- Formas Bilineales V5Document9 pagesFormas Bilineales V5y cartaphilusNo ratings yet
- Exámenes MaestríaDocument42 pagesExámenes MaestríaManuel2759No ratings yet
- Formas Bilinear CuadraticaDocument17 pagesFormas Bilinear CuadraticaLuis De La CruzNo ratings yet
- Guía 2Document2 pagesGuía 2KIAM-MING SALINAS PALMANo ratings yet
- 11 de JunioDocument8 pages11 de JunioLuis Daniel Cardenas PeredaNo ratings yet
- Punto FijoDocument26 pagesPunto Fijopez15No ratings yet
- Formas BilinealesDocument17 pagesFormas BilinealesDrakester99No ratings yet
- 3 - Práctica 2 - Distribución Conjunta y CondicionalDocument9 pages3 - Práctica 2 - Distribución Conjunta y CondicionalValen MoranNo ratings yet
- Ejercicios de Matematica DiscretaDocument3 pagesEjercicios de Matematica DiscretapatrichsNo ratings yet
- Problemas Ohio State University 2024Document8 pagesProblemas Ohio State University 2024Noelia Muñiz DiazNo ratings yet
- Sea A : Algebra Lineal I Grupo 4100. Tarea 5 Correspondiente Al Quinto Examen ParcialDocument2 pagesSea A : Algebra Lineal I Grupo 4100. Tarea 5 Correspondiente Al Quinto Examen ParcialAlberto RamirezNo ratings yet
- Pauta Auxiliar 1Document6 pagesPauta Auxiliar 1Cristian Sylva SalvadorNo ratings yet
- Preguntas de Analisis FuncionalDocument6 pagesPreguntas de Analisis FuncionalbenjaminNo ratings yet
- Funciones Ortogonales y Series de FourierDocument122 pagesFunciones Ortogonales y Series de FourierSyd BarrettNo ratings yet
- NotasSem 2023-2Document43 pagesNotasSem 2023-2Ivan DiazNo ratings yet
- Hoja 5 ProblemasDocument2 pagesHoja 5 ProblemasMaría Alonso SantillanaNo ratings yet
- Espacios EuclidianosDocument11 pagesEspacios EuclidianosJason Godoy MuraNo ratings yet
- Ayudantia 04Document4 pagesAyudantia 04Ricardo MarchantNo ratings yet
- 06 Variable Aleatoria CotinuaDocument24 pages06 Variable Aleatoria CotinuaFernando PeNo ratings yet
- Info Adicional de Valor Esperado y VarianzaDocument6 pagesInfo Adicional de Valor Esperado y VarianzaDANIELNo ratings yet
- Cálculo Integral en N DimensionesDocument66 pagesCálculo Integral en N DimensionesLuis AlanísNo ratings yet
- Pye6 17Document3 pagesPye6 17elaleziNo ratings yet
- Tema 1 TensoresDocument25 pagesTema 1 TensoresEnrique Rodríguez RamosNo ratings yet
- Bruzual, R., & Domínguez, M. - Problemario Espacios de HilbertDocument15 pagesBruzual, R., & Domínguez, M. - Problemario Espacios de Hilbertdecember29No ratings yet
- Apunte IeDocument3 pagesApunte IeKaren Regina MartínezNo ratings yet
- MA2321 GuiadeanaliisisDocument11 pagesMA2321 Guiadeanaliisismiguel onamundosNo ratings yet
- Solución Guía de Ejercicios I1 v.2Document24 pagesSolución Guía de Ejercicios I1 v.2Valentina ContrerasNo ratings yet
- ExamenalgDocument2 pagesExamenalgRodrigo De La FuenteNo ratings yet
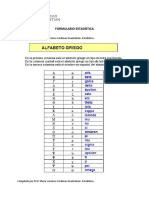
- FORMULARIO EstadisticaDocument16 pagesFORMULARIO EstadisticaMario Alfonso Maldonado BahamondeNo ratings yet
- 00cap 9 Formas Bilineales y CuadraticasDocument36 pages00cap 9 Formas Bilineales y Cuadraticaseli2013No ratings yet
- Clase 1Document3 pagesClase 1MARCO ANTONIO MACOTELA GUTIERREZNo ratings yet
- 2.2 - Examen Abril 2021Document1 page2.2 - Examen Abril 2021Kinam UcNo ratings yet
- Espacios Vectoriales Algebra LinealDocument23 pagesEspacios Vectoriales Algebra LinealGabrielaZambranoPintoNo ratings yet
- Tarea 1Document2 pagesTarea 1Kindle AmazonNo ratings yet
- Tarea 1Document3 pagesTarea 1starwars172003No ratings yet
- Examen Final-G1Document1 pageExamen Final-G1Bryam RománNo ratings yet
- Práctico 8Document2 pagesPráctico 8Jenifer RodriguezNo ratings yet
- Modulo Distribuciones DiscretasDocument16 pagesModulo Distribuciones DiscretasOCLOCK BQNo ratings yet
- Ejer Cici Os Profe OchoaDocument20 pagesEjer Cici Os Profe OchoaDavid GarciaNo ratings yet
- MA-2112 Guía de La Prof. Libuska Juricek (Parte 1)Document4 pagesMA-2112 Guía de La Prof. Libuska Juricek (Parte 1)NorbertoJRSNo ratings yet
- Sesion9A AL2022EJDocument15 pagesSesion9A AL2022EJsolani hancco alcahuamanNo ratings yet
- Medida Leccion 1Document6 pagesMedida Leccion 1Jorge AvelinoNo ratings yet
- Tema4 4Document7 pagesTema4 4ARMANDO RAFAEL ANTONIO CIFUENTES RODRIGUEZNo ratings yet
- Ayudantía 12 - Sección G.FernándezDocument4 pagesAyudantía 12 - Sección G.FernándezBoris Durandeau UrraNo ratings yet
- Algebra HJ06 2019ADocument3 pagesAlgebra HJ06 2019AJorgeNo ratings yet
- 1 - Conjuntos OrtonormalesDocument8 pages1 - Conjuntos OrtonormalesSmitty WerbenjagermanjensenNo ratings yet
- Problemas de Cálculo Diferencial e Integral PDFDocument526 pagesProblemas de Cálculo Diferencial e Integral PDFJorge100% (3)
- BorelLebesgue PDFDocument18 pagesBorelLebesgue PDFmemfilmatNo ratings yet
- Algebra HJ06 2019A SolucionDocument6 pagesAlgebra HJ06 2019A SolucionJorgeNo ratings yet
- Ejercicios Espacios Metricos/ Metric Spaces ExercisesDocument5 pagesEjercicios Espacios Metricos/ Metric Spaces Exercisessanti10sepNo ratings yet
- Lectura 3. Más de Integrales TriplesDocument60 pagesLectura 3. Más de Integrales TriplesJOHAN STIVEN LONDOÑO ALVAREZNo ratings yet
- Navidad en El Polo Norte 3Document2 pagesNavidad en El Polo Norte 3Juan TorresNo ratings yet
- Resumen e Interpretación Generalidades RNEDocument7 pagesResumen e Interpretación Generalidades RNEJuan TorresNo ratings yet
- CRED Menores de 5 AñosDocument81 pagesCRED Menores de 5 AñosSilvia Fretel InocenteNo ratings yet
- Filo SofiaDocument12 pagesFilo SofiaJuan TorresNo ratings yet
- Aplicaciones de Ecuaciones DiferencialesDocument9 pagesAplicaciones de Ecuaciones DiferencialesJuan TorresNo ratings yet
- Campo 3Document7 pagesCampo 3Juan TorresNo ratings yet
- Norma TecnicaDocument152 pagesNorma TecnicaManuel LopezNo ratings yet
- Prueba de Efectividad de Aditivo Plastificante Chema en Mezcla de Concreto AutocompactableDocument2 pagesPrueba de Efectividad de Aditivo Plastificante Chema en Mezcla de Concreto AutocompactableJuan TorresNo ratings yet
- Aplicación de La Integrales de LineaDocument3 pagesAplicación de La Integrales de LineaJuan TorresNo ratings yet
- Perfil Longitudinal FIC UNI (Datos)Document5 pagesPerfil Longitudinal FIC UNI (Datos)Juan TorresNo ratings yet
- Tensores PDFDocument152 pagesTensores PDFAntonio SaavedraNo ratings yet
- DiadasDocument9 pagesDiadasLaura RDNo ratings yet
- Situación Del Empleo en El PerúDocument11 pagesSituación Del Empleo en El PerúJuan TorresNo ratings yet
- Aplicaciones Del Algebra Lineal en La TesisDocument2 pagesAplicaciones Del Algebra Lineal en La TesisJuan TorresNo ratings yet
- Tabla de Presión de Vapor de Agua Líquida y HieloDocument2 pagesTabla de Presión de Vapor de Agua Líquida y HieloMeiser B. Gamboa100% (1)
- Pasta de Consistencia NormalDocument3 pagesPasta de Consistencia NormalJuan TorresNo ratings yet
- Informe Del Video de Homilía Del Inicio Del Pontificado Del PapaDocument2 pagesInforme Del Video de Homilía Del Inicio Del Pontificado Del PapaJuan TorresNo ratings yet
- PC06PADM2007IDocument11 pagesPC06PADM2007IJohanzhiito HPNo ratings yet
- GasesReales-Fuerzas Intermoleculares PDFDocument36 pagesGasesReales-Fuerzas Intermoleculares PDFJuan TorresNo ratings yet
- El Vacío de BrunoDocument3 pagesEl Vacío de BrunoJuan TorresNo ratings yet
- Solucion 2016 II UniDocument240 pagesSolucion 2016 II UniJuan Torres100% (2)
- Pc07padm2007i PDFDocument19 pagesPc07padm2007i PDFJenry Eberly Pariona ArotincoNo ratings yet
- FQ2009 SolucionarioDocument41 pagesFQ2009 SolucionarioJuan TorresNo ratings yet
- MCCSS T1 2020Document7 pagesMCCSS T1 2020Enrique Jurado RuizNo ratings yet
- Presentacion Mecanica Del Medio Continuo Primera ParteDocument16 pagesPresentacion Mecanica Del Medio Continuo Primera ParteJosé Sandoval100% (1)
- RobóticaDocument9 pagesRobóticaDANIEL BARRERA MAZONo ratings yet
- S03 S2-Movimiento en 2D 3D ProyectilesDocument27 pagesS03 S2-Movimiento en 2D 3D ProyectilesBruno Estela ObregonNo ratings yet
- Juan Sebastian Bello - Algebra LinealDocument21 pagesJuan Sebastian Bello - Algebra LinealKaren GaitanNo ratings yet
- Producto VectorialDocument12 pagesProducto VectorialJuan Carlos CarrilloNo ratings yet
- Actividad Ii FGM206Document2 pagesActividad Ii FGM206Aneudy C. Patiño MorrobelNo ratings yet
- 03 Notas de Algebra Lineal PDFDocument117 pages03 Notas de Algebra Lineal PDFCris Carry-onNo ratings yet
- Teorema de La DivergenciaDocument8 pagesTeorema de La DivergenciaLeonardo GálvezNo ratings yet
- Vectores (D) - 1Document25 pagesVectores (D) - 1yunior100% (1)
- Francisco G. Morales A. Algebra LinealDocument15 pagesFrancisco G. Morales A. Algebra Linealc1ssc0No ratings yet
- For 1er Par. Mat313 PDFDocument6 pagesFor 1er Par. Mat313 PDFDavidNo ratings yet
- Lectura 2Document3 pagesLectura 2pepeNo ratings yet
- Guia de Ejercicios 1 - ÁLGEBRA LINEALDocument2 pagesGuia de Ejercicios 1 - ÁLGEBRA LINEALgabytomejiaNo ratings yet
- 2 TA Algebra LinealDocument6 pages2 TA Algebra LinealYakelin Mayra ChambiNo ratings yet
- Temas 1 A 5Document36 pagesTemas 1 A 5Kevin ProañoNo ratings yet
- Geometria HomoteciaDocument13 pagesGeometria HomoteciaCaupolican Catrileo CuitiñoNo ratings yet
- Mat II. Resumen de Geometría 3DDocument3 pagesMat II. Resumen de Geometría 3DmiguelalvaroNo ratings yet
- Determinantes EjerciciosDocument4 pagesDeterminantes EjerciciosMiguel RojasNo ratings yet
- Actividad 4 Investigacion de Operaciones 2 Actul 2022Document4 pagesActividad 4 Investigacion de Operaciones 2 Actul 2022infraestructura vialNo ratings yet
- Pauta Solemne 1, Prim 2005Document3 pagesPauta Solemne 1, Prim 2005Vezz VaresseNo ratings yet
- Mathcad - Analisis DinamicoDocument3 pagesMathcad - Analisis Dinamicojuan miguelNo ratings yet
- 1.-Álgebra MatricialDocument14 pages1.-Álgebra MatricialDarío PazmiñoNo ratings yet
- Algebra LDocument2 pagesAlgebra LJoelissa PerdomoNo ratings yet
- 1000 Problemas de Fisica General - J. Fidalgo y M FernandezDocument684 pages1000 Problemas de Fisica General - J. Fidalgo y M Fernandezcatmi777No ratings yet
- El Grupo de Lorentz PDFDocument4 pagesEl Grupo de Lorentz PDFIsdiaz61 HrNo ratings yet
- LocalizacionDocument22 pagesLocalizacionPablo Angel ToiaNo ratings yet