You might also like
- Sensors and Transducers: Mechatronics - Unit 1, Chapter 2Document41 pagesSensors and Transducers: Mechatronics - Unit 1, Chapter 2Vinay KNo ratings yet
- Transducers and Data Aquisition SystemsDocument176 pagesTransducers and Data Aquisition SystemsSHINYNo ratings yet
- Astm E1086Document5 pagesAstm E1086KHNo ratings yet
- Opical Tranducer MaualDocument40 pagesOpical Tranducer MaualhemantecNo ratings yet
- gm5621-LF-AA Genesis LCD Controller PDFDocument66 pagesgm5621-LF-AA Genesis LCD Controller PDFcarlosmg4100% (1)
- Arc ReactorDocument10 pagesArc Reactorshubh100% (1)
- Displacement+measurement 0Document12 pagesDisplacement+measurement 0Shine Lim0% (1)
- Instrumentation and Measurement in Electrical EngineeringFrom EverandInstrumentation and Measurement in Electrical EngineeringRating: 3.5 out of 5 stars3.5/5 (5)
- Industrial Sensors and Transducers Term PaperDocument14 pagesIndustrial Sensors and Transducers Term PaperKumater TerNo ratings yet
- BMI BRG-100RF X-Ray - Circuit DiagramsDocument68 pagesBMI BRG-100RF X-Ray - Circuit DiagramsIslam AlabbasyNo ratings yet
- Transducer and Their ClassificationDocument2 pagesTransducer and Their ClassificationPujaChaudhuryNo ratings yet
- Presentation On Sensors and ActuatorsDocument115 pagesPresentation On Sensors and ActuatorschibuikeNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StorageFrom EverandPower Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StorageNo ratings yet
- Sensors and Signal ProcessingDocument22 pagesSensors and Signal ProcessingvinodhNo ratings yet
- Cyclic Current RatingsDocument5 pagesCyclic Current RatingsJeremy Mcfadden100% (1)
- Pulsed Electric Field TechnologyDocument6 pagesPulsed Electric Field TechnologyDavid UribeNo ratings yet
- 4 - Sensors and TransducersDocument30 pages4 - Sensors and TransducersClarence TanNo ratings yet
- Measurement and InstrumentationDocument9 pagesMeasurement and InstrumentationYaser AkarNo ratings yet
- Analog Devices Practical Design Techniques For Sensor Signal ConditioningDocument362 pagesAnalog Devices Practical Design Techniques For Sensor Signal ConditioningАлександр ГоловлёвNo ratings yet
- Industrial Training - IDocument58 pagesIndustrial Training - ITOB3Y 09No ratings yet
- Sensor and TransducerDocument7 pagesSensor and TransducerjuniNo ratings yet
- Sensor Technology: Computer ProcessorDocument9 pagesSensor Technology: Computer ProcessorvivekNo ratings yet
- Sensors in Control SystemsDocument9 pagesSensors in Control Systemsadrian_asperga4598No ratings yet
- Alsalama College of Sciences &technology Electrical Engineering DepartmentDocument40 pagesAlsalama College of Sciences &technology Electrical Engineering DepartmentAlamin IbrahimNo ratings yet
- All AssignmentDocument12 pagesAll AssignmentChala GetaNo ratings yet
- Module-2 IoT NotesDocument14 pagesModule-2 IoT NotesAyush BhadaniNo ratings yet
- Department of Electronics & Comm. Engg. B.I.T. Mesra, Ranchi EC8101 Intelligent Instrumentation Module - 1Document11 pagesDepartment of Electronics & Comm. Engg. B.I.T. Mesra, Ranchi EC8101 Intelligent Instrumentation Module - 1Teja ViswaNo ratings yet
- Sensors Engineering CompilationDocument319 pagesSensors Engineering CompilationJOECELLE ABLEGINANo ratings yet
- SA QB Solved Unit 1-2Document26 pagesSA QB Solved Unit 1-2Kundan PednekarNo ratings yet
- Sensor and TransducersDocument8 pagesSensor and TransducersDhruba RoyNo ratings yet
- Clin. Eng. LabsDocument67 pagesClin. Eng. Labsप्रथमेश क्षीरसागरNo ratings yet
- Assignment 1Document9 pagesAssignment 1Alimin AnniNo ratings yet
- Iot Module 2Document12 pagesIot Module 2nagaraj pNo ratings yet
- E-Note 5596 Content Document 20231104101220PMDocument16 pagesE-Note 5596 Content Document 20231104101220PMdigitalpixelpalleteNo ratings yet
- TransducersDocument52 pagesTransducersBasavaraja K M KotyalNo ratings yet
- Mechatronics NotesDocument131 pagesMechatronics NotesNagarajNo ratings yet
- Sensor FundamentalsDocument6 pagesSensor FundamentalsRohit SaindaneNo ratings yet
- Different Types of Transducers - Characteristics, Classification, Applications PDFDocument18 pagesDifferent Types of Transducers - Characteristics, Classification, Applications PDFAAKASHNo ratings yet
- Control Systems, Robotics, and Automation - Vol - Xxi - Sensors inDocument25 pagesControl Systems, Robotics, and Automation - Vol - Xxi - Sensors inEngr S R Khan100% (1)
- U20ecst09 Mi Unit IIDocument20 pagesU20ecst09 Mi Unit IIDr.M.Nagarajan biherNo ratings yet
- Mte 1102Document22 pagesMte 1102Sourav RoyNo ratings yet
- Sensing and ActuationDocument34 pagesSensing and Actuation1DA19ME073 Nawraj PandeyNo ratings yet
- Types of Sensor Passive and Active SensorsDocument5 pagesTypes of Sensor Passive and Active SensorsDEMEKE BEYENENo ratings yet
- Basic Electronics - Ch-5Document11 pagesBasic Electronics - Ch-52203051050594No ratings yet
- IE TransducerDocument36 pagesIE Transducermuhammad anshariNo ratings yet
- Sensor Classification and How To Choose A SensorDocument7 pagesSensor Classification and How To Choose A SensorAkhilesh Reddy KarraNo ratings yet
- Torque Manual 2019 PDFDocument11 pagesTorque Manual 2019 PDFSHANKARNo ratings yet
- Potentiostat3 PDFDocument18 pagesPotentiostat3 PDFEisa MoosaviNo ratings yet
- Door Sensor: (Submitted in Partial Fulfillment of The Requirement ForDocument21 pagesDoor Sensor: (Submitted in Partial Fulfillment of The Requirement ForAvinash VishwakarmaNo ratings yet
- Introductiontosensorstransducers 140830045447 Phpapp02Document17 pagesIntroductiontosensorstransducers 140830045447 Phpapp02Karim NazefNo ratings yet
- Sensors and Microcontroller PDFDocument48 pagesSensors and Microcontroller PDFPranitha reddyNo ratings yet
- Chapter 03 - Transducers and Their ResponseDocument42 pagesChapter 03 - Transducers and Their ResponsehlkjjkNo ratings yet
- Ec8101 Intelligent InstrumentationDocument11 pagesEc8101 Intelligent InstrumentationMegha Srivastava0% (1)
- 176 PLD SensorsDocument21 pages176 PLD SensorsHeba SalahNo ratings yet
- Sensor: 1.proximity SensingDocument4 pagesSensor: 1.proximity SensingMarvick Abuy MilarpezNo ratings yet
- Name:-Tushar Nepale SE (B) Sub: - Internet of Things ROLL NO: - 88Document6 pagesName:-Tushar Nepale SE (B) Sub: - Internet of Things ROLL NO: - 88Tushar NepaleNo ratings yet
- Module-1-Senosrs and Energy Systems - CSE-GKP - Docx-13.08.2023Document33 pagesModule-1-Senosrs and Energy Systems - CSE-GKP - Docx-13.08.2023Mohammed owaisNo ratings yet
- Analytical Chemistry (CHE 615) Chemical SensorsDocument55 pagesAnalytical Chemistry (CHE 615) Chemical SensorsSarad ChaudharyNo ratings yet
- Transmission of Signals Sergejs BoikoDocument22 pagesTransmission of Signals Sergejs BoikoСергей БойкоNo ratings yet
- Sensors Interfacing TechniquesDocument16 pagesSensors Interfacing TechniquesRaja VenkateshNo ratings yet
- Unit V Transducers and Data Acquisition Systems TransducersDocument13 pagesUnit V Transducers and Data Acquisition Systems TransducersViswanathan ASNo ratings yet
- CH-2 SensorsDocument55 pagesCH-2 Sensorsdagimawgchew777No ratings yet
- Index: Page No. List of ContentDocument20 pagesIndex: Page No. List of Contentkolluri ramyaNo ratings yet
- Mod2 Sensors ActuatorsDocument70 pagesMod2 Sensors Actuatorsbronzeboy737No ratings yet
- GoldDocument1 pageGoldshubhNo ratings yet
- Paper Title: Author NameDocument1 pagePaper Title: Author NameshubhNo ratings yet
- FSDFDFDocument5 pagesFSDFDFshubhNo ratings yet
- Interpretation 1Document3 pagesInterpretation 1shubhNo ratings yet
- Theoretical Neuroscience II Exercise 8: Principal Component Analysis (PCA)Document2 pagesTheoretical Neuroscience II Exercise 8: Principal Component Analysis (PCA)shubhNo ratings yet
- Eletromagnetic - William HaytDocument11 pagesEletromagnetic - William HaytshubhNo ratings yet
- Day 5-Shoulders/Abs/Cardio (Firday) : Workout PlanDocument1 pageDay 5-Shoulders/Abs/Cardio (Firday) : Workout PlanshubhNo ratings yet
- Engineering Design Project: (Declared As Deemed-to-be-University U/s 3 of The UGC Act., 1956)Document15 pagesEngineering Design Project: (Declared As Deemed-to-be-University U/s 3 of The UGC Act., 1956)shubhNo ratings yet
- First Semester: ST ST ST ST ST ND RD THDocument2 pagesFirst Semester: ST ST ST ST ST ND RD THshubhNo ratings yet
- New Doc 2017-12-07Document20 pagesNew Doc 2017-12-07shubhNo ratings yet
- Minebea 17PM JDocument2 pagesMinebea 17PM JshubhNo ratings yet
- LAB 11 Dac Interfacing To The 8051 TrainerDocument3 pagesLAB 11 Dac Interfacing To The 8051 TrainershubhNo ratings yet
- LM 334Document14 pagesLM 334Mai Van SyNo ratings yet
- Jee Main 25 January 2023 Shift 1 Physics Memory Based Paper With SolutionsDocument12 pagesJee Main 25 January 2023 Shift 1 Physics Memory Based Paper With Solutionsyash choudharyNo ratings yet
- FAQ - Energy Storage Module (ESM) : Please Provide Feedback On This TechnoteDocument1 pageFAQ - Energy Storage Module (ESM) : Please Provide Feedback On This Technotefazly rahmanNo ratings yet
- Experiment 3: Ac Circuit: RC and RL in SeriesDocument8 pagesExperiment 3: Ac Circuit: RC and RL in SeriesGy LiawNo ratings yet
- Virtual Lab 1 Capacitance and Dielectrics PDFDocument7 pagesVirtual Lab 1 Capacitance and Dielectrics PDFG19 Sakata, Angela Louisse F.No ratings yet
- Oswaal NEET UG Syllabus PhysicsDocument5 pagesOswaal NEET UG Syllabus PhysicsRajanNo ratings yet
- Manual Tester Componentes T7Document1 pageManual Tester Componentes T7Manu NNo ratings yet
- Case StudyDocument32 pagesCase StudyEri PranantoNo ratings yet
- Infrared Array Sensor Grid-EYE (AMG88)Document7 pagesInfrared Array Sensor Grid-EYE (AMG88)lalalala123No ratings yet
- LM 431 Regulador VoltajeDocument21 pagesLM 431 Regulador Voltajeyes-caliNo ratings yet
- RPT Physics F6 Second Term 2018Document8 pagesRPT Physics F6 Second Term 2018norhazli ibrahimNo ratings yet
- IEEE STD C37.40b-1996Document7 pagesIEEE STD C37.40b-1996Alex Moreno AnabalónNo ratings yet
- AlepDocument10 pagesAlepMiz AelyfhaNo ratings yet
- Fuel Cell 10 KW Inverter SystemDocument60 pagesFuel Cell 10 KW Inverter Systemismailbej100% (1)
- Network AnalysisDocument71 pagesNetwork AnalysisJayNo ratings yet
- HP ProBook 6570b Disassembly InstructionsDocument16 pagesHP ProBook 6570b Disassembly InstructionsLoyd BronneNo ratings yet
- Electrical Property of Ceramic and PolymerDocument32 pagesElectrical Property of Ceramic and PolymerbawokeNo ratings yet
- Dielectric CeramicsDocument38 pagesDielectric CeramicsShin NguyenNo ratings yet
- Evo 8000 SeriesDocument169 pagesEvo 8000 SeriesEngkus KuswayaNo ratings yet
- B. 1.35 Mega-Ohms. D. 2.0 Mega-OhmsDocument5 pagesB. 1.35 Mega-Ohms. D. 2.0 Mega-OhmsPao CastillonNo ratings yet
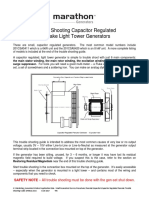
- Trouble Shooting Capacitor Regulated Pancake Light Tower GeneratorsDocument7 pagesTrouble Shooting Capacitor Regulated Pancake Light Tower GeneratorsBilly MecanizadoNo ratings yet
- 1.1 Need of AutomationDocument56 pages1.1 Need of AutomationRicko Rachmadillah SiraitNo ratings yet
- 01-04-2021 SR - Super60 & All Jee-Main GTM-16 Question PaperDocument21 pages01-04-2021 SR - Super60 & All Jee-Main GTM-16 Question PaperGowri ShankarNo ratings yet
- 4CX1600B HF AmpDocument7 pages4CX1600B HF Ampdavid reyes100% (1)
- Philips+Lc7.2e+Paplasma ChassisDocument91 pagesPhilips+Lc7.2e+Paplasma ChassisWalter_Antonio_5973No ratings yet