You might also like
- System Modeling Using A Mamdani Rule Base: University of FloridaDocument7 pagesSystem Modeling Using A Mamdani Rule Base: University of FloridaValy AndyNo ratings yet
- Control Fuzzy For SAGMillDocument7 pagesControl Fuzzy For SAGMillMiguelAngel1979No ratings yet
- Automation of Umpiring in Cricket Using Fuzzy LogicDocument8 pagesAutomation of Umpiring in Cricket Using Fuzzy LogicBharadwaj SanthoshNo ratings yet
- Putting Fuzzy Logic To WorkDocument7 pagesPutting Fuzzy Logic To Workxfiasco100% (2)
- Toward Techniques For Auto-Tuning GPU Algorithms: Abstract. We Introduce A Variety of Techniques Toward Autotuning DataDocument10 pagesToward Techniques For Auto-Tuning GPU Algorithms: Abstract. We Introduce A Variety of Techniques Toward Autotuning Datade7yT3izNo ratings yet
- Fuzzy Logic Control Method For The Washing Time of The Washing Machine Final Project ReportDocument20 pagesFuzzy Logic Control Method For The Washing Time of The Washing Machine Final Project ReportNay Min AungNo ratings yet
- An Introduction To Fuzzy Control SystemsDocument10 pagesAn Introduction To Fuzzy Control SystemsAzizulAzhar Ramli BanjarmasinNo ratings yet
- Fuzzy Final Report Washing MachineDocument20 pagesFuzzy Final Report Washing MachineNay Min AungNo ratings yet
- AI SVM NetworkDocument10 pagesAI SVM Networkrajthakre81No ratings yet
- Deep Learning-SummeryDocument24 pagesDeep Learning-SummeryAram ShojaeiNo ratings yet
- What Is Fuzzy Logic? What Is Fuzzy Control? What Is Fuzzy LogicDocument5 pagesWhat Is Fuzzy Logic? What Is Fuzzy Control? What Is Fuzzy LogicsukhmatharuNo ratings yet
- Operator Tuning in Fuzzy Production Rules Using Neural NetworksDocument6 pagesOperator Tuning in Fuzzy Production Rules Using Neural Networksfree5050No ratings yet
- Solution Manual For Mechanical Vibrations Theory and Applications 1st Edition by KellyDocument104 pagesSolution Manual For Mechanical Vibrations Theory and Applications 1st Edition by KellyElizabethSteelefocgk100% (1)
- Fuzzy LogicDocument16 pagesFuzzy LogicDragatoNo ratings yet
- A New Fuzzy-Based Total Demand Distortion Factor For Nonsinusoidal SituationsDocument8 pagesA New Fuzzy-Based Total Demand Distortion Factor For Nonsinusoidal SituationsAmit sahaNo ratings yet
- UNIT-2 Foundations of Deep LearningDocument64 pagesUNIT-2 Foundations of Deep LearningbhavanaNo ratings yet
- Lab2 UpdatedDocument5 pagesLab2 UpdatedSekar PrasetyaNo ratings yet
- FI 02-Merged PDFDocument218 pagesFI 02-Merged PDFCNo ratings yet
- Lab 5Document3 pagesLab 5Vu LeNo ratings yet
- Fuzzy LogicDocument21 pagesFuzzy LogicMeera BarveNo ratings yet
- Fuzzy Logic & It's ApplicationsDocument7 pagesFuzzy Logic & It's ApplicationsS Bharadwaj ReddyNo ratings yet
- What Does It Offer?: Fuzzy RulesDocument16 pagesWhat Does It Offer?: Fuzzy Rulesmeenakshi56No ratings yet
- PI ControllerDocument4 pagesPI ControllerDivyesh HarwaniNo ratings yet
- 03 Fuzzy Inference Systems PDFDocument7 pages03 Fuzzy Inference Systems PDFponpisutNo ratings yet
- A Fuzzy Robust Controller For Robotic SystemsDocument6 pagesA Fuzzy Robust Controller For Robotic SystemsIJAERS JOURNALNo ratings yet
- Fuzzy Based Washing MachineDocument10 pagesFuzzy Based Washing Machinearunkijai100% (5)
- AIML-Module-3-part 2Document122 pagesAIML-Module-3-part 2srujanmoilyNo ratings yet
- Towards The Investigation of The Turing Machine: Kis G EzaDocument7 pagesTowards The Investigation of The Turing Machine: Kis G EzaJuhász TamásNo ratings yet
- Constraint Random VerificationDocument7 pagesConstraint Random Verificationjanapaneni ramadeviNo ratings yet
- Module 3: Frequency Response Analysis (FRA) : Understanding The Basic Principle of FRA and Bode Stability CriterionDocument4 pagesModule 3: Frequency Response Analysis (FRA) : Understanding The Basic Principle of FRA and Bode Stability CriterionRahmanNo ratings yet
- CHP 4 Fuzzy Inference SystemsDocument38 pagesCHP 4 Fuzzy Inference SystemsheadaidsNo ratings yet
- Motor Pos Con LabDocument12 pagesMotor Pos Con LabGoran MiljkovicNo ratings yet
- Motor Position Control Lab: University at BuffaloDocument12 pagesMotor Position Control Lab: University at BuffaloGoran MiljkovicNo ratings yet
- Fuzzy Logic: Dr. Savita KumariDocument40 pagesFuzzy Logic: Dr. Savita KumariTanmay PalNo ratings yet
- 22 Buckboost Converter Control With Fuzzy Logic ApproachDocument8 pages22 Buckboost Converter Control With Fuzzy Logic Approachapi-19508046No ratings yet
- Fuzzy Logic Control SystemDocument11 pagesFuzzy Logic Control SystemMAHAMMAD ILIYASNo ratings yet
- Temperature Control System Using Fuzzy Logic TechnDocument5 pagesTemperature Control System Using Fuzzy Logic TechnMinh NguyệnNo ratings yet
- DVR With PsoDocument4 pagesDVR With PsoMahesh SinghNo ratings yet
- Chapter-4 System Design 4.1 Modelling of SRMDocument15 pagesChapter-4 System Design 4.1 Modelling of SRMSree GaneshNo ratings yet
- ANUPAMDocument10 pagesANUPAMAnupam PradhanNo ratings yet
- Lab 1: Discrete Vibration AnalysisDocument1 pageLab 1: Discrete Vibration Analysiskitsune-nildeNo ratings yet
- Identification of Structures From Powder X-Ray Diffraction DataDocument4 pagesIdentification of Structures From Powder X-Ray Diffraction DataCarla ParraNo ratings yet
- Design Neuro-Fuzzy Controller For The Speed Control of DC Servo MotorDocument4 pagesDesign Neuro-Fuzzy Controller For The Speed Control of DC Servo MotorPrince Janesh UniqueNo ratings yet
- Algorithm, Quenching Algorithm,: 5. Comparison With Greedy and Simulated AnnealingDocument2 pagesAlgorithm, Quenching Algorithm,: 5. Comparison With Greedy and Simulated AnnealingNathalie Caro RamirezNo ratings yet
- Fuzzy Rules in Fis: by - Abhishek Kumar - Mc1945 Sujit Yadav - Mc1960 Shubham Tiwari - Mc1954Document8 pagesFuzzy Rules in Fis: by - Abhishek Kumar - Mc1945 Sujit Yadav - Mc1960 Shubham Tiwari - Mc1954Lucky LuckyNo ratings yet
- Articulo 1Document4 pagesArticulo 1Emily RamirezNo ratings yet
- 1 s20 S1474667016327744 MainDocument8 pages1 s20 S1474667016327744 MainMINAR SNo ratings yet
- Assignment 04: 1 What Is Meant by Stability of A Control System? Explain Routh Stability CriteriaDocument4 pagesAssignment 04: 1 What Is Meant by Stability of A Control System? Explain Routh Stability CriteriaSyed AfzalNo ratings yet
- CO542 - Neural Networks and Fuzzy Systems Lab 1 - Fuzzy Logic Designing Fuzzy Control SystemsDocument5 pagesCO542 - Neural Networks and Fuzzy Systems Lab 1 - Fuzzy Logic Designing Fuzzy Control SystemsPasan TennakoonNo ratings yet
- Scilab Ninja: Module 3: Classical Loopshaping DesignDocument12 pagesScilab Ninja: Module 3: Classical Loopshaping Designorg25grNo ratings yet
- Fuzzy Inference SystemsDocument56 pagesFuzzy Inference SystemsIndukuri Venkata Subba LakshmiNo ratings yet
- Machine Learning by Tom Mitchell - DefinitionsDocument12 pagesMachine Learning by Tom Mitchell - DefinitionsPonambalam VilashiniNo ratings yet
- Introduction To Fuzzy Logic SystemDocument15 pagesIntroduction To Fuzzy Logic SystemJoy SrkrNo ratings yet
- Extensible, Interactive Epistemologies For Voice-over-IP: Akdhj and JljlkjsDocument7 pagesExtensible, Interactive Epistemologies For Voice-over-IP: Akdhj and JljlkjsJohn MNo ratings yet
- Lecture 8Document7 pagesLecture 8hassan IQNo ratings yet
- Fuzzy Based Landslide Prediction Using Wireless Sensor NetworksDocument19 pagesFuzzy Based Landslide Prediction Using Wireless Sensor NetworksAamir HabibNo ratings yet
- CIK 3D Registers v2Document238 pagesCIK 3D Registers v2Alexandru BOSS RONo ratings yet
- Classical Approach to Constrained and Unconstrained Molecular DynamicsFrom EverandClassical Approach to Constrained and Unconstrained Molecular DynamicsNo ratings yet
- Radial Basis Networks: Fundamentals and Applications for The Activation Functions of Artificial Neural NetworksFrom EverandRadial Basis Networks: Fundamentals and Applications for The Activation Functions of Artificial Neural NetworksNo ratings yet
- 358 Soucek WasserekDocument28 pages358 Soucek WasserekAaditya BaidNo ratings yet
- 1995 Nida PettyDocument9 pages1995 Nida PettyAaditya BaidNo ratings yet
- Particulars (In Crores) Mar-17 Mar-16 Mar-15 Mar-14: 7.total Advances To Total Deposits Ratio % ChangeDocument16 pagesParticulars (In Crores) Mar-17 Mar-16 Mar-15 Mar-14: 7.total Advances To Total Deposits Ratio % ChangeAaditya BaidNo ratings yet
- Portfolio-Aditya Baid (BAM17013)Document2 pagesPortfolio-Aditya Baid (BAM17013)Aaditya BaidNo ratings yet
- Your Contact InformationDocument8 pagesYour Contact InformationAaditya BaidNo ratings yet
- Windows XP LatestDocument15 pagesWindows XP LatestAaditya BaidNo ratings yet
- Under The Supervision Of:: Dr. Heera BarpujaryDocument10 pagesUnder The Supervision Of:: Dr. Heera BarpujaryAaditya BaidNo ratings yet
- Presentation on: Taking rural India forward ग ाँव बढ़े तो देश बढ़े///Document8 pagesPresentation on: Taking rural India forward ग ाँव बढ़े तो देश बढ़े///Aaditya BaidNo ratings yet
- Non Interest IncomeDocument5 pagesNon Interest IncomeAaditya BaidNo ratings yet
- Mandrake Linux ItmDocument13 pagesMandrake Linux ItmAaditya BaidNo ratings yet
- RepoDocument18 pagesRepoAaditya BaidNo ratings yet
- A Presentation On Windows VistaDocument12 pagesA Presentation On Windows VistaAaditya BaidNo ratings yet
- FedoraDocument19 pagesFedoraAaditya BaidNo ratings yet
- Android 130923124440 Phpapp01Document22 pagesAndroid 130923124440 Phpapp01Aaditya BaidNo ratings yet
- Repo TitDocument10 pagesRepo TitAaditya BaidNo ratings yet
- IES 2012 Success Tips For UPSCDocument2 pagesIES 2012 Success Tips For UPSCAaditya BaidNo ratings yet
- Simple Usecases of PI B2B - SFTP and PGPDocument35 pagesSimple Usecases of PI B2B - SFTP and PGPPiedone640% (1)
- Peir Nts Section 8 BeDocument14 pagesPeir Nts Section 8 BethamestunnelNo ratings yet
- PSA Technology-More Than A Hydrogen Purifier: TOBIAS KELLER and GOUTAM SHAHANI, Linde EngineeringDocument2 pagesPSA Technology-More Than A Hydrogen Purifier: TOBIAS KELLER and GOUTAM SHAHANI, Linde EngineeringChem.EnggNo ratings yet
- Organic Fertilizer RRLDocument8 pagesOrganic Fertilizer RRLEldon Jay MaltoNo ratings yet
- Uj 76 HD 5 CdivutDocument18 pagesUj 76 HD 5 Cdivuttfrcuy76No ratings yet
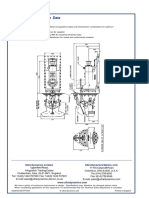
- Ultrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedDocument2 pagesUltrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedhaujesNo ratings yet
- (L) Examples of Machine Shop Practice (1910)Document54 pages(L) Examples of Machine Shop Practice (1910)Ismael 8877100% (1)
- Pca - STATADocument17 pagesPca - STATAAnonymous U5RYS6NqNo ratings yet
- OS Lab ManualDocument37 pagesOS Lab ManualVenkatanagasudheer ThummapudiNo ratings yet
- Honeywell Aquatrol 2000 PDFDocument60 pagesHoneywell Aquatrol 2000 PDFvsilickasNo ratings yet
- Process and Inter-Process Systems For All Industries.: Cleaning Validation: An Overall PerspectiveDocument7 pagesProcess and Inter-Process Systems For All Industries.: Cleaning Validation: An Overall PerspectiveDesarrollo de Colecciones IVIC-BMRNo ratings yet
- EECI-Modules-2010Document1 pageEECI-Modules-2010maialenzitaNo ratings yet
- Midterm Fin Oo4Document82 pagesMidterm Fin Oo4patricia gunio100% (1)
- Procter & Gamble Global Geothermal Screening Study FINAL 9 Feb 2023Document56 pagesProcter & Gamble Global Geothermal Screening Study FINAL 9 Feb 2023Mohammad Syahir JamaluddinNo ratings yet
- Blurring Borders Collusion Between Anti-Immigrant Groups and Immigration Enforcement AgentsDocument9 pagesBlurring Borders Collusion Between Anti-Immigrant Groups and Immigration Enforcement AgentsJill HolslinNo ratings yet
- Technical Writing PDFDocument129 pagesTechnical Writing PDFKundan Kumar100% (1)
- ACCA P5 GTG Question Bank - 2011Document180 pagesACCA P5 GTG Question Bank - 2011raqifiluz86% (22)
- Vbulletin 5 Connect: Quick Start Guide (Ver 1.0)Document21 pagesVbulletin 5 Connect: Quick Start Guide (Ver 1.0)dantevasquezNo ratings yet
- Section 8 33KVDocument13 pagesSection 8 33KVMuna HamidNo ratings yet
- GG&G 2012 CatDocument111 pagesGG&G 2012 Cattyrant88No ratings yet
- 6 Elements of A Healthy ChurchDocument2 pages6 Elements of A Healthy ChurchJayhia Malaga JarlegaNo ratings yet
- The Passport: Gate Valve TYPE: "SCH 160"Document25 pagesThe Passport: Gate Valve TYPE: "SCH 160"CE CERTIFICATENo ratings yet
- Raul C. Cosare v. Broadcom Asia Inc. and Dante ArevaloDocument4 pagesRaul C. Cosare v. Broadcom Asia Inc. and Dante ArevaloRam Migue SaintNo ratings yet
- Cronbach's AlphaDocument4 pagesCronbach's AlphaHeide Orevillo Apa-apNo ratings yet
- My Linux Attack Commands-ADocument51 pagesMy Linux Attack Commands-Aapogee.protectionNo ratings yet
- Taifun GT User GuideDocument5 pagesTaifun GT User GuidecarloslarumbeNo ratings yet
- Editing Packs I Maybe Will NeedDocument3 pagesEditing Packs I Maybe Will NeedMijo SusićNo ratings yet
- Balanced Scorecard Approach ReportDocument8 pagesBalanced Scorecard Approach ReportGeryes E. Haddad100% (1)
- The Cycle of Leadership Through Transformational, Eccles - (Leadership) PDFDocument16 pagesThe Cycle of Leadership Through Transformational, Eccles - (Leadership) PDFEliana LopezNo ratings yet
- AMEM211 Lab2 PotentiometerDocument10 pagesAMEM211 Lab2 PotentiometerB.s. BhosleNo ratings yet