You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- New Free Data Viral Script TrickyYarDocument39 pagesNew Free Data Viral Script TrickyYarAshik VaiNo ratings yet
- IFM Part2 UpdatedDocument61 pagesIFM Part2 UpdatedMandar Priya PhatakNo ratings yet
- Historical Currency Crises (After WWII)Document74 pagesHistorical Currency Crises (After WWII)Mandar Priya PhatakNo ratings yet
- IFM Slides Part 3Document37 pagesIFM Slides Part 3Mandar Priya PhatakNo ratings yet
- Strategies For Causal Inference Part 0: Introduction: CAU Kiel Summer Term 2019Document18 pagesStrategies For Causal Inference Part 0: Introduction: CAU Kiel Summer Term 2019Mandar Priya PhatakNo ratings yet
- 04 Combin OptimizationDocument41 pages04 Combin OptimizationMandar Priya PhatakNo ratings yet
- ThesisDocument82 pagesThesisMandar Priya PhatakNo ratings yet
- Chapter 1Document42 pagesChapter 1Mandar Priya PhatakNo ratings yet
- EcoI Exam Ws1415!2!5creditsDocument5 pagesEcoI Exam Ws1415!2!5creditsMandar Priya PhatakNo ratings yet
- Formulary Eco IIDocument47 pagesFormulary Eco IIMandar Priya PhatakNo ratings yet
- Financial 1Document41 pagesFinancial 1Mandar Priya PhatakNo ratings yet
- Abn AmroDocument14 pagesAbn AmroMandar Priya PhatakNo ratings yet
- Cba Presentation SgpeDocument44 pagesCba Presentation SgpeMandar Priya PhatakNo ratings yet
- Please Answer Questions Tlie With: w:AG), RüDocument2 pagesPlease Answer Questions Tlie With: w:AG), RüMandar Priya PhatakNo ratings yet
- I.,Qi) ' LL, /L: Al N+1 ?y" N-L Yl''Document2 pagesI.,Qi) ' LL, /L: Al N+1 ?y" N-L Yl''Mandar Priya PhatakNo ratings yet
- Lyons 1997Document24 pagesLyons 1997Mandar Priya PhatakNo ratings yet
- Sarno Schmeling PaperDocument48 pagesSarno Schmeling PaperMandar Priya PhatakNo ratings yet
- EcoI Exam WS1415!1!5creditsDocument5 pagesEcoI Exam WS1415!1!5creditsMandar Priya PhatakNo ratings yet
- Lecture 4Document128 pagesLecture 4Mandar Priya PhatakNo ratings yet
- Advmai Ws1718 IDocument44 pagesAdvmai Ws1718 IMandar Priya PhatakNo ratings yet
- Dynamic Macro Basic Macro Frameworks Summer 2016 1Document90 pagesDynamic Macro Basic Macro Frameworks Summer 2016 1Mandar Priya PhatakNo ratings yet
- Likelihood Ratio, Wald, and Lagrange Multiplier (Score) TestsDocument23 pagesLikelihood Ratio, Wald, and Lagrange Multiplier (Score) TestsMandar Priya PhatakNo ratings yet
- Formulary Eco IIDocument47 pagesFormulary Eco IIMandar Priya PhatakNo ratings yet
- Dynamic Macro HistoryversusExpectations Summer2016 1Document71 pagesDynamic Macro HistoryversusExpectations Summer2016 1Mandar Priya PhatakNo ratings yet
- 908 Lecture 6Document51 pages908 Lecture 6Mandar Priya PhatakNo ratings yet
- Questions To Lecture 7 - IS-LM Model and Aggregate DemandDocument6 pagesQuestions To Lecture 7 - IS-LM Model and Aggregate DemandMandar Priya Phatak100% (2)
- Theoretical Statistics. Lecture 15.: M-Estimators. Consistency of M-Estimators. Nonparametric Maximum LikelihoodDocument20 pagesTheoretical Statistics. Lecture 15.: M-Estimators. Consistency of M-Estimators. Nonparametric Maximum LikelihoodMandar Priya PhatakNo ratings yet
- 1 ProbabilityDocument56 pages1 ProbabilityMandar Priya PhatakNo ratings yet
- BSC SyllabusDocument11 pagesBSC SyllabusMandar Priya PhatakNo ratings yet
- EC908 Lecture 2Document53 pagesEC908 Lecture 2Mandar Priya PhatakNo ratings yet
- Air BNB PaperDocument17 pagesAir BNB Paperdummyrequester3No ratings yet
- Weekly MeetingDocument2 pagesWeekly MeetingSenior Software Engineer Emil RodriguezNo ratings yet
- ch01 2Document10 pagesch01 2AgdfNo ratings yet
- Presentation-1 INTEGRITYDocument10 pagesPresentation-1 INTEGRITYRonnel Andres HernandezNo ratings yet
- Categorizing Faults Via DGA: GE Grid Solutions M&DDocument30 pagesCategorizing Faults Via DGA: GE Grid Solutions M&DMurali KrishnaNo ratings yet
- ATSEDocument2 pagesATSEoperanorissNo ratings yet
- A1 - QA.L.01 List of Instrument & Test Equipments-NEW 01Document1,129 pagesA1 - QA.L.01 List of Instrument & Test Equipments-NEW 01JKP OperationNo ratings yet
- Assignment Cover Page Doc Dhaka University 4752 PDFDocument3 pagesAssignment Cover Page Doc Dhaka University 4752 PDFFayyaz KhanNo ratings yet
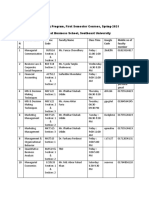
- SL N o Course Name Course Code Faculty Name Class Time Google Code Mobile No of Faculty MemberDocument2 pagesSL N o Course Name Course Code Faculty Name Class Time Google Code Mobile No of Faculty Memberএ.বি.এস. আশিকNo ratings yet
- Unit II - CPU SchedulingDocument37 pagesUnit II - CPU SchedulingNikita PadaliaNo ratings yet
- Fish SafeDocument4 pagesFish SafeengineershoaibqaziNo ratings yet
- The Impact of Electronic Health Records On The Duration of Patients' Visits: Time and Motion StudyDocument9 pagesThe Impact of Electronic Health Records On The Duration of Patients' Visits: Time and Motion Studyمالك مناصرةNo ratings yet
- DX DiagDocument37 pagesDX DiagCarlos Rodríguez MarzoNo ratings yet
- Design Issues: 1. Input To The Code GeneratorDocument3 pagesDesign Issues: 1. Input To The Code GeneratorAashutosh Tiwari100% (1)
- Toplighting Compact enDocument4 pagesToplighting Compact enUmer Hussain MoverNo ratings yet
- Asset Tracking For Physical Goods For Agromall Strategy DocumentDocument11 pagesAsset Tracking For Physical Goods For Agromall Strategy DocumentAderayo OnipedeNo ratings yet
- Unit 4 MCQDocument48 pagesUnit 4 MCQsakshiNo ratings yet
- Adaptive Dynamic Relaxation Algorithm For Non-Linear Hyperelastic StructuresDocument19 pagesAdaptive Dynamic Relaxation Algorithm For Non-Linear Hyperelastic StructuresJoaquin VieraNo ratings yet
- BEP University of CambridgeDocument42 pagesBEP University of CambridgeMario ClementeNo ratings yet
- Aristo Feed 3004 U6 With Mig 4002c/6502c Power SupplyDocument3 pagesAristo Feed 3004 U6 With Mig 4002c/6502c Power SupplyChinta IulianNo ratings yet
- Log and Antilog TableDocument3 pagesLog and Antilog TableDeboshri BhattacharjeeNo ratings yet
- SampleDocument11 pagesSampleGia Minh Tieu TuNo ratings yet
- Dräger X-Am® 5000 Technical ManualDocument72 pagesDräger X-Am® 5000 Technical Manualirsya894027No ratings yet
- User Manual MAM 890 - V01Document24 pagesUser Manual MAM 890 - V01Brian Steve Perez Quintero100% (1)
- Efficient Optimization of BOF-dedusting: October 2014Document12 pagesEfficient Optimization of BOF-dedusting: October 2014Marcelo GuerraNo ratings yet
- Castro, Rommel M. Bscrim 1cDocument2 pagesCastro, Rommel M. Bscrim 1cZrusty ZimonNo ratings yet
- Foundation Year Applications 2.0 LaunchDocument17 pagesFoundation Year Applications 2.0 LaunchStace INo ratings yet
- Kumpulan Kuis Administrasi SistemDocument63 pagesKumpulan Kuis Administrasi SistemArruhu NahyaNo ratings yet
- 8.3 PLSQL PPT Ch7 PDFDocument18 pages8.3 PLSQL PPT Ch7 PDFDunNo ratings yet