You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Pre CalculusDocument100 pagesPre CalculusQWERTY100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Design Calculations For Pressure VesselsDocument24 pagesDesign Calculations For Pressure VesselsMichael Lageman93% (15)
- Surface Area OFA Solid FiguresDocument21 pagesSurface Area OFA Solid FiguresRica Mae Salvador SerranoNo ratings yet
- 3rd Quarter Grade 6 Math Item BankDocument40 pages3rd Quarter Grade 6 Math Item BankKristine Joy Pita100% (4)
- WASC Question PaperDocument27 pagesWASC Question PaperAsemota OghoghoNo ratings yet
- Dish End Blank Dia Calculation PDFDocument4 pagesDish End Blank Dia Calculation PDFMas afjal100% (2)
- Geometric Geodesy A (2013) PDFDocument151 pagesGeometric Geodesy A (2013) PDFCrystelGraceAntonioWall0% (1)
- l6 Instrumentation and Data Acquisition v2Document98 pagesl6 Instrumentation and Data Acquisition v2Abdullah AhmedNo ratings yet
- Data Acquisition in LabVIEW 2Document53 pagesData Acquisition in LabVIEW 2lebouNo ratings yet
- Myoelectric ControlDocument15 pagesMyoelectric ControlAbdullah AhmedNo ratings yet
- Amputation StatisticsDocument1 pageAmputation StatisticsAbdullah AhmedNo ratings yet
- FinalThesis PDFDocument58 pagesFinalThesis PDFAbdullah AhmedNo ratings yet
- Modeling of Two Wheel Balancing RobotDocument7 pagesModeling of Two Wheel Balancing RobotAbdullah AhmedNo ratings yet
- CH 1Document11 pagesCH 1Abdullah AhmedNo ratings yet
- Heat ExperimentDocument10 pagesHeat ExperimentAbdullah AhmedNo ratings yet
- Target: Jee (Advanced) 2019: DPP No. # 2Document6 pagesTarget: Jee (Advanced) 2019: DPP No. # 2raghavbhatiaNo ratings yet
- Roller Cone Bit GeometryDocument7 pagesRoller Cone Bit GeometryZ Babar KhanNo ratings yet
- High School Math's Questions and Solution Without CalculatorDocument56 pagesHigh School Math's Questions and Solution Without CalculatorMathematics AsadNo ratings yet
- Engineering Drawing Midterm Quiz 2Document10 pagesEngineering Drawing Midterm Quiz 2Johnjacob GerardoNo ratings yet
- MATH 6 PPT Q3 - Visualizing, Identifying Solid Figures 1Document22 pagesMATH 6 PPT Q3 - Visualizing, Identifying Solid Figures 1rossana rondaNo ratings yet
- 2010 Onecut CatalogDocument4 pages2010 Onecut CatalogNiki MikiNo ratings yet
- Ibau-Hamburg 1Document10 pagesIbau-Hamburg 1belleblackNo ratings yet
- IntroductoryCourse GeometryDocument24 pagesIntroductoryCourse GeometryJokeNo ratings yet
- Soal Uts Matematika SMP Kelas Ix Semester GanjilDocument3 pagesSoal Uts Matematika SMP Kelas Ix Semester GanjilDe Pe75% (4)
- Geometry Performance IndicatorsDocument10 pagesGeometry Performance IndicatorsSravan Kumar ChallojuNo ratings yet
- Coordinte GeometryDocument72 pagesCoordinte GeometrySukhamrit PalNo ratings yet
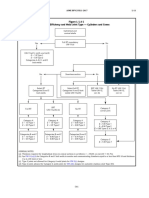
- Figure L-1.4-1 Joint Efficiency and Weld Joint Type - Cylinders and ConesDocument4 pagesFigure L-1.4-1 Joint Efficiency and Weld Joint Type - Cylinders and ConessanketNo ratings yet
- Cone - Wikipedia, The Free EncyclopediaDocument6 pagesCone - Wikipedia, The Free EncyclopediaBagas DewandonoNo ratings yet
- PPT-Composite SolidsDocument12 pagesPPT-Composite SolidsUnique MeNo ratings yet
- MATH q3Document6 pagesMATH q3EDERLYN ABEQUIBELNo ratings yet
- (WWW - Entrance-Exam - Net) - GRE Sample Paper 10Document11 pages(WWW - Entrance-Exam - Net) - GRE Sample Paper 10Mohammad SarimNo ratings yet
- MA Sample Paper 8 UnsolvedDocument9 pagesMA Sample Paper 8 UnsolvedSambasiva RaoNo ratings yet
- Catalog of CERECDocument164 pagesCatalog of CERECChakir LaiminaNo ratings yet
- Introduction To Engineering Drawing & Projection of PointsDocument27 pagesIntroduction To Engineering Drawing & Projection of Pointsmamtha_v1No ratings yet
- Cambridge IGCSEDocument8 pagesCambridge IGCSENandhivarmanNo ratings yet
- 13 Surface Areas & VolumesDocument4 pages13 Surface Areas & VolumesTJSinghNo ratings yet
- Math-Data-Bank-Grade 1 - SGAESDocument16 pagesMath-Data-Bank-Grade 1 - SGAESMaria Elaine De CastroNo ratings yet
- Engineering Drawing SylabousDocument11 pagesEngineering Drawing SylabousysonuNo ratings yet