You might also like
- Problemas resueltos de Hidráulica de CanalesFrom EverandProblemas resueltos de Hidráulica de CanalesRating: 4.5 out of 5 stars4.5/5 (7)
- (G5) Respuestas Cinematica de La Partícula 2004Document3 pages(G5) Respuestas Cinematica de La Partícula 2004Kerwin PerezNo ratings yet
- Unidad 2Document10 pagesUnidad 2Arturo Portillo EstevezNo ratings yet
- Ex. Sustitutorio Ee438 - Fiee UniDocument12 pagesEx. Sustitutorio Ee438 - Fiee UniDavidNo ratings yet
- Unidad 7 - Ecuacion General de La Energia 2015-Ii PDFDocument76 pagesUnidad 7 - Ecuacion General de La Energia 2015-Ii PDFmichiel reymundo garciaNo ratings yet
- 5 Medidores de Flujo en Tuberias 2dosem2018Document12 pages5 Medidores de Flujo en Tuberias 2dosem2018Jimmy Alexander Barrera ÁlvarezNo ratings yet
- Grupo B, Flujos Comprensibles en Ductos, Tubos de Seccion Constante Sin Transferencia de Calor, Adiabáticas, Flujo Fanno, Tema 13 Fluidos IIDocument25 pagesGrupo B, Flujos Comprensibles en Ductos, Tubos de Seccion Constante Sin Transferencia de Calor, Adiabáticas, Flujo Fanno, Tema 13 Fluidos IIJimmy vargas obregonNo ratings yet
- Formulario de ElectricidadDocument1 pageFormulario de ElectricidadFelipe Hdez LopezNo ratings yet
- Laboratorio de Sistemas TareaDocument6 pagesLaboratorio de Sistemas TareaAngel Espinoza MontesinosNo ratings yet
- Manual de Familia TTLDocument10 pagesManual de Familia TTLEdgar AvircataNo ratings yet
- AMPLIFICADORES DE INSTRUMENTACION - v-2013-1Document27 pagesAMPLIFICADORES DE INSTRUMENTACION - v-2013-1STEVEN ROJAS SALTOSNo ratings yet
- 2.7.4 Procesos CíclicosDocument16 pages2.7.4 Procesos CíclicosIVAN FRANCISCO GUEVARA MARTINEZNo ratings yet
- Flujos en Ductos de Sección Constante Sin Transferencia de CalorDocument10 pagesFlujos en Ductos de Sección Constante Sin Transferencia de Calorronald100% (1)
- MEDIDAS DE VELOCIDAD Y CAUDALu4c2s2Document10 pagesMEDIDAS DE VELOCIDAD Y CAUDALu4c2s2MarcelinoNo ratings yet
- Mecán. de Fluidos II - Usmp 13, Salto Hidráulico - Práctica DirigidaDocument7 pagesMecán. de Fluidos II - Usmp 13, Salto Hidráulico - Práctica Dirigidarichard carranzaNo ratings yet
- Sem2008-2 ELT2642Document51 pagesSem2008-2 ELT2642Edwin J. TitichocaNo ratings yet
- Practica 9 - Venturi PDFDocument5 pagesPractica 9 - Venturi PDFCamilo QuinteroNo ratings yet
- Clase 9Document16 pagesClase 9BENAVIDES AGUILAR DENIS JOLCENNo ratings yet
- REALIMENTACIONDocument4 pagesREALIMENTACIONoli123verNo ratings yet
- 0001 Problemas de Presion PDFDocument38 pages0001 Problemas de Presion PDFIvoneNo ratings yet
- Ec. de Momento AngularDocument15 pagesEc. de Momento AngularcaucaNo ratings yet
- Final 20-07-22Document3 pagesFinal 20-07-22Leandro ArchivoNo ratings yet
- Oscilador de Puente de Wien: 1 Longoria V Azquez, Omar AlejandroDocument5 pagesOscilador de Puente de Wien: 1 Longoria V Azquez, Omar AlejandroOMAR ALEJANDRO LONGORIA VAZQUEZNo ratings yet
- 01 Introduccion - Repaso-Tipos FlujoDocument74 pages01 Introduccion - Repaso-Tipos FlujoCamilo RamirezNo ratings yet
- 09 Diapos Aplicaciones de La Ecuación de BernoulliDocument20 pages09 Diapos Aplicaciones de La Ecuación de BernoulliLuis Alberto Cuya RamosNo ratings yet
- Experimento 11-RESONANCIADocument14 pagesExperimento 11-RESONANCIAalain100% (1)
- Ex. Sustitutorio Ee438 - Fiee UniDocument8 pagesEx. Sustitutorio Ee438 - Fiee UniDavidNo ratings yet
- Practica Medidor VenturiDocument11 pagesPractica Medidor Venturileila loveNo ratings yet
- Boletín Ejercicios UD4Document2 pagesBoletín Ejercicios UD4wintry FacenhordNo ratings yet
- Primera Ley de La Termodinásdmica para Sistemas CerradosDocument11 pagesPrimera Ley de La Termodinásdmica para Sistemas CerradosGian carlos Cairo gonzalezNo ratings yet
- Practica 9 - Venturi PDFDocument5 pagesPractica 9 - Venturi PDFFabián GonzálezNo ratings yet
- Filtros PPT - Analogicos 2Document23 pagesFiltros PPT - Analogicos 2Miluska AyalaNo ratings yet
- Flujoatravsdecompuertas 140701003244 Phpapp01Document16 pagesFlujoatravsdecompuertas 140701003244 Phpapp01jhosdadoNo ratings yet
- EE442 Exp7 Amp - SintonizadoDocument5 pagesEE442 Exp7 Amp - Sintonizadomarco lopez vasquezNo ratings yet
- Ejemplo 1 Trafo (MONO)Document4 pagesEjemplo 1 Trafo (MONO)Victor RolónNo ratings yet
- Perdidas en TuberiasDocument12 pagesPerdidas en TuberiasDiego OrtizNo ratings yet
- Tema 2 (Ejercicios Propuestos)Document6 pagesTema 2 (Ejercicios Propuestos)Fernando aguilar canalesNo ratings yet
- Laboratorio 2 H 2Document10 pagesLaboratorio 2 H 2Chris De LeoNo ratings yet
- Probo Sci L AdoresDocument12 pagesProbo Sci L AdoresMiguel Ch MamaniNo ratings yet
- Diseño GeometricoDocument39 pagesDiseño GeometricoJhazmani Zarate DazaNo ratings yet
- Síntesis Campos Electromagnéticos EstáticosDocument2 pagesSíntesis Campos Electromagnéticos EstáticosGabriel DalmassoNo ratings yet
- Ex. Parcial Ee438 - Fiee UniDocument6 pagesEx. Parcial Ee438 - Fiee UniDavidNo ratings yet
- 01 Tuberias - Flujo LaminarDocument45 pages01 Tuberias - Flujo LaminarIsnaldo Barros OviedoNo ratings yet
- FRV Salto HidraulicoDocument20 pagesFRV Salto HidraulicoKaroline Cruz LuisNo ratings yet
- 4.1 Ecuacion de BernoulliDocument18 pages4.1 Ecuacion de BernoulliLaura BastidasNo ratings yet
- HidrodinÁmicaDocument5 pagesHidrodinÁmicaapuatau9462100% (3)
- 3PCML838C OsorioDocument7 pages3PCML838C OsorioSTEVEN ALEJANDRO OSORIO RIVERANo ratings yet
- Final 2Document5 pagesFinal 2Pamela KarenNo ratings yet
- Guia 6.Document3 pagesGuia 6.Alex AtencioNo ratings yet
- Fluidos 3. Ecuaciones Fundamentales de Un FlujoDocument67 pagesFluidos 3. Ecuaciones Fundamentales de Un FlujoRoxana Rodríguez TollinchiNo ratings yet
- Geneondacap 6Document36 pagesGeneondacap 6HERRERA VARGAS ISRAEL IVANNo ratings yet
- MF Unidad 5 HidrodinámicaDocument51 pagesMF Unidad 5 Hidrodinámicakevin joshua segura chicoNo ratings yet
- Procesos RestringidosDocument9 pagesProcesos RestringidosDiana RubiNo ratings yet
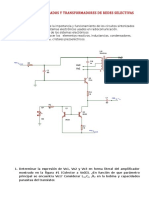
- Circuitos Sintonizados y Transformadores de Redes SelectivasDocument12 pagesCircuitos Sintonizados y Transformadores de Redes SelectivasRoger Alexis Hernández Calle100% (1)
- Armónicas en Sistemas Eléctricos IndustrialesFrom EverandArmónicas en Sistemas Eléctricos IndustrialesRating: 4.5 out of 5 stars4.5/5 (12)
- Manual Apícola Indap 2016 Chile PDFDocument116 pagesManual Apícola Indap 2016 Chile PDFnegro_pinolero9621No ratings yet
- Plantas Aromaticas El ColoradoDocument14 pagesPlantas Aromaticas El ColoradoFredy Ureta HuanuqueñoNo ratings yet
- La Enjambrazón Un Método Natural de Control de VarroaDocument3 pagesLa Enjambrazón Un Método Natural de Control de VarroaFlex PertsNo ratings yet
- Modulo 1Document4 pagesModulo 1s_barriosNo ratings yet
- Aplicación Del Amitraz Como Acaricida Contra VarroaDocument3 pagesAplicación Del Amitraz Como Acaricida Contra Varroas_barriosNo ratings yet
- Manual Apícola Indap 2016 Chile PDFDocument116 pagesManual Apícola Indap 2016 Chile PDFnegro_pinolero9621No ratings yet
- Libro Forma Inteligente de Obtener Apmetodo TraslarveDocument4 pagesLibro Forma Inteligente de Obtener Apmetodo TraslarveVictorNo ratings yet
- El Lenguaje de Comunicación de Las AbejasDocument5 pagesEl Lenguaje de Comunicación de Las Abejass_barriosNo ratings yet
- Jean Marie Philippe - Guía Del ApicultorDocument379 pagesJean Marie Philippe - Guía Del Apicultors_barrios100% (2)
- Polinizacion y Agricultura Sustentable PDFDocument34 pagesPolinizacion y Agricultura Sustentable PDFLynn Paredes MargullisNo ratings yet
- El Legado de Las AbejasDocument36 pagesEl Legado de Las Abejass_barriosNo ratings yet
- Paquetes de AbejasDocument4 pagesPaquetes de Abejass_barriosNo ratings yet
- Apitoxina 2012Document48 pagesApitoxina 2012EgoSumLux100% (1)
- Apiterapia Hoy en Argentina y en CubaDocument185 pagesApiterapia Hoy en Argentina y en CubaGermán BeltzerNo ratings yet
- Avispa Chaqueta - AmarillaDocument2 pagesAvispa Chaqueta - AmarillaferminachNo ratings yet
- Manual Apícola Indap 2016 Chile PDFDocument116 pagesManual Apícola Indap 2016 Chile PDFnegro_pinolero9621No ratings yet
- El Zángano en La ApiculturaDocument7 pagesEl Zángano en La Apiculturas_barriosNo ratings yet
- Avispa Chaqueta - AmarillaDocument2 pagesAvispa Chaqueta - AmarillaferminachNo ratings yet
- Reinas de ReemplazoDocument3 pagesReinas de Reemplazos_barriosNo ratings yet
- François HuberDocument3 pagesFrançois Hubers_barriosNo ratings yet
- Patología de La ReinaDocument4 pagesPatología de La Reinas_barriosNo ratings yet
- Los Mejores Superalimentos Del Mundo PDFDocument44 pagesLos Mejores Superalimentos Del Mundo PDFdarthlover100% (4)
- UT 5 Flujo ViscosoDocument65 pagesUT 5 Flujo Viscosos_barriosNo ratings yet
- Nosemosis 1Document7 pagesNosemosis 1s_barriosNo ratings yet
- Problemas - Incluye Pendulo Cónico PDFDocument48 pagesProblemas - Incluye Pendulo Cónico PDFs_barriosNo ratings yet
- Las Razones Por Qué La Corrupción Destruye La Prosperidad HumanaDocument5 pagesLas Razones Por Qué La Corrupción Destruye La Prosperidad Humanas_barriosNo ratings yet
- Resuelto Avión Arrastra PlaneadorDocument1 pageResuelto Avión Arrastra Planeadors_barriosNo ratings yet
- Trabajo y Energia PDFDocument14 pagesTrabajo y Energia PDFHaydee López LozanoNo ratings yet
- Problema 5 Serway - Plano InclinadoDocument3 pagesProblema 5 Serway - Plano Inclinados_barriosNo ratings yet
- Problemas Fisica RecDocument12 pagesProblemas Fisica Recs_barriosNo ratings yet
- HangaresDocument17 pagesHangaresCamilo BustosNo ratings yet
- Ata 23Document200 pagesAta 23Giancarlo TaboadaNo ratings yet
- Marcos Santero SergioDocument25 pagesMarcos Santero SergioSergio Marcos SanteroNo ratings yet
- HidráulicaDocument11 pagesHidráulicaGerson Hyger R HYNo ratings yet
- Códigos para GT1Document1 pageCódigos para GT1José BocNo ratings yet
- VADEMECUM REMER - Glosarios - Envases y Embalajes PDFDocument25 pagesVADEMECUM REMER - Glosarios - Envases y Embalajes PDFAlberto SundayNo ratings yet
- Contenedores Aéreos PortfolioDocument4 pagesContenedores Aéreos PortfolioAntonío IvailovNo ratings yet
- TC Act 220323 PIIIDocument2 pagesTC Act 220323 PIIIGrets MTZNo ratings yet
- Entrevista Taller HidraulicoDocument7 pagesEntrevista Taller HidraulicoJuan VillagranaNo ratings yet
- Motor CoheteDocument29 pagesMotor CohetePepe TorresNo ratings yet
- Resistencia Al Avance y Propulsión 123Document11 pagesResistencia Al Avance y Propulsión 123Aguado Millan Robert DanielNo ratings yet
- Informe - HuarochiriDocument12 pagesInforme - Huarochirilizf234011No ratings yet
- Sensores SatelitalesDocument8 pagesSensores SatelitalesAlan RodriguezNo ratings yet
- Reglamento DE AEROMODELISMoDocument9 pagesReglamento DE AEROMODELISMoGian MenottiNo ratings yet
- Angulos de Elevacion y DepresionDocument2 pagesAngulos de Elevacion y DepresionJosé Miguel TrejoNo ratings yet
- Comportamiento Térmico y TermomecánicoDocument18 pagesComportamiento Térmico y TermomecánicoAlejandroNo ratings yet
- Informe PasantiasDocument1 pageInforme PasantiasNakari FigueroaNo ratings yet
- Carlos GardelDocument3 pagesCarlos GardelYUSSEF EDWARD STEVE CHICOMA ROQUENo ratings yet
- Práctica 2 Coeficientes de Resistencia Al AvanceDocument2 pagesPráctica 2 Coeficientes de Resistencia Al AvanceSebastián Ramírez100% (1)
- Temperatura Del CobreDocument4 pagesTemperatura Del Cobreharry75700No ratings yet
- 9731 Vol2 EsDocument461 pages9731 Vol2 Esabatcroa100% (1)
- Ficha Spirax S6 ATF VM PlusDocument2 pagesFicha Spirax S6 ATF VM PlusjasogtiNo ratings yet
- Aviacion AgricolaDocument4 pagesAviacion AgricolaWaldir ValeroNo ratings yet
- Empuje DinamicoDocument28 pagesEmpuje DinamicoManu GarcesNo ratings yet
- Motor Cummins N14Document8 pagesMotor Cummins N14Fabrizio Jesus Morales Salirrosas100% (2)
- Procedimiento de Fabricación de Palas de Aerogenerador Con Material Termoplástico.Document15 pagesProcedimiento de Fabricación de Palas de Aerogenerador Con Material Termoplástico.energía solar ok100% (1)
- Aeropuestos Unidad 4Document4 pagesAeropuestos Unidad 4Adrian SantiagoNo ratings yet
- Costo A Corto PlazoDocument9 pagesCosto A Corto PlazoMILAGROSNo ratings yet
- Manual Sid 206 SeriesDocument197 pagesManual Sid 206 Seriesmelzevahc100% (1)
- Informe N°2019 - Inspeccion UH FeederDocument13 pagesInforme N°2019 - Inspeccion UH FeederEdward LarensNo ratings yet