You might also like
- 02 NAZA-M Quick Start Guide v1.24 enDocument32 pages02 NAZA-M Quick Start Guide v1.24 enSholeh Abdullah Arif BudimanNo ratings yet
- NM Release Notes enDocument11 pagesNM Release Notes enSholeh Abdullah Arif BudimanNo ratings yet
- Phantom FC40 User Manual v1.06 enDocument31 pagesPhantom FC40 User Manual v1.06 enMauricioNo ratings yet
- S Cada Export Excel PDFDocument2 pagesS Cada Export Excel PDFSholeh Abdullah Arif BudimanNo ratings yet
- Weblink UhuyDocument1 pageWeblink UhuySholeh Abdullah Arif BudimanNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- IO SystemDocument32 pagesIO Systemnanekaraditya06No ratings yet
- Wiring Diagram SCH17: Service InformationDocument16 pagesWiring Diagram SCH17: Service Informationابو حمزة صبريNo ratings yet
- Beyond SVGFDocument66 pagesBeyond SVGFLiliana QueiroloNo ratings yet
- Lesson Plan 18 (Final)Document3 pagesLesson Plan 18 (Final)ryan agustianNo ratings yet
- Percentage Conversion Worksheet PDFDocument2 pagesPercentage Conversion Worksheet PDFJamie LeeNo ratings yet
- Mos PDFDocument194 pagesMos PDFChoon Ewe LimNo ratings yet
- Border Security Using Wireless Integrated Network Sensors (WINS)Document18 pagesBorder Security Using Wireless Integrated Network Sensors (WINS)Pradeep CheekatlaNo ratings yet
- Section 1Document28 pagesSection 1Sonia KaurNo ratings yet
- CE 205 - Analyzing Hydrographs and Deriving Unit HydrographsDocument17 pagesCE 205 - Analyzing Hydrographs and Deriving Unit HydrographsUmange RanasingheNo ratings yet
- Ups Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVADocument1 pageUps Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVASebastian Matias CruzNo ratings yet
- A Dimensional Engineering Process For ShipbuildingDocument11 pagesA Dimensional Engineering Process For ShipbuildingWJccnNo ratings yet
- Final EstimateDocument60 pagesFinal EstimateChristian Paulo Cardinal TungolNo ratings yet
- CS610 Final Term Past Papers Mega FileDocument35 pagesCS610 Final Term Past Papers Mega Filehowtoplaygames38No ratings yet
- Detailed Geotechnical ReportDocument29 pagesDetailed Geotechnical Reportathar abbasNo ratings yet
- The Pythagorean Spiral ProjectDocument2 pagesThe Pythagorean Spiral Projectapi-316478863No ratings yet
- Academic Performance of Face-to-Face and Online Students in An Introductory Economics Course and Determinants of Final Course GradesDocument13 pagesAcademic Performance of Face-to-Face and Online Students in An Introductory Economics Course and Determinants of Final Course GradesLou BaldomarNo ratings yet
- Basic Engineering Correlation Calculus v3 001Document3 pagesBasic Engineering Correlation Calculus v3 001Ska doosh100% (1)
- Peter Attia Measuring Cardiovascular Disease Risk and The Importance of ApoBDocument14 pagesPeter Attia Measuring Cardiovascular Disease Risk and The Importance of ApoBabhimanyu50% (2)
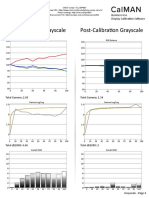
- TCL 55P607 CNET Review Calibration ResultsDocument3 pagesTCL 55P607 CNET Review Calibration ResultsDavid KatzmaierNo ratings yet
- Data Assigment 1Document32 pagesData Assigment 1Sukhwinder Kaur100% (1)
- Armando Anaya Guenter y Zender - Sak Tz'iDocument14 pagesArmando Anaya Guenter y Zender - Sak Tz'iAngel Sanchez GamboaNo ratings yet
- To Design and Simulate Priority EncoderDocument6 pagesTo Design and Simulate Priority EncoderShubham GargNo ratings yet
- Pages 296-298 Module 6 ReviewDocument4 pagesPages 296-298 Module 6 Reviewapi-332361871No ratings yet
- Huawei E5885ls 93a Mobile Wifi DatasheetDocument22 pagesHuawei E5885ls 93a Mobile Wifi DatasheetMohammed ShakilNo ratings yet
- Huawei Site Design GuidelineDocument7 pagesHuawei Site Design GuidelineHeru BudiantoNo ratings yet
- PI ControllerDocument5 pagesPI Controllerdanuega1No ratings yet
- Hitachi ZW550Document12 pagesHitachi ZW550ForomaquinasNo ratings yet
- Primary-Side Regulation PWM Power Switch General Description FeaturesDocument10 pagesPrimary-Side Regulation PWM Power Switch General Description FeaturespopoNo ratings yet
- Libro de FLOTACIÓN-101-150 PDFDocument50 pagesLibro de FLOTACIÓN-101-150 PDFIsaias Viscarra HuizaNo ratings yet
- 1910 179bookletDocument12 pages1910 179bookletRichard DeNijsNo ratings yet