You might also like
- Electrical - BB International PDFDocument480 pagesElectrical - BB International PDFedelmolina100% (3)
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsFrom EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNo ratings yet
- DC Motor SimulinkDocument8 pagesDC Motor SimulinkMELVINNo ratings yet
- NASA Technical Paper 3675: A Survey of Theoretical and Experimental Coaxial Rotor Aerodynamic ResearchDocument34 pagesNASA Technical Paper 3675: A Survey of Theoretical and Experimental Coaxial Rotor Aerodynamic ResearchThomas MouraNo ratings yet
- PL-3-Policy On Measurement UncertaintyDocument10 pagesPL-3-Policy On Measurement UncertaintymffmadiNo ratings yet
- Becoming A Changemaker Introduction To Social InnovationDocument14 pagesBecoming A Changemaker Introduction To Social InnovationRabih SouaidNo ratings yet
- Maintenance Handbook On Bonding Earthing For 25 KV AC Traction SystemsDocument46 pagesMaintenance Handbook On Bonding Earthing For 25 KV AC Traction SystemsPavan100% (1)
- Antenna Azimuth Position Control System Using PIDDocument12 pagesAntenna Azimuth Position Control System Using PIDAyumuNo ratings yet
- Operations and Maintenance Manual MAN-10000946 Elmar Grease Injection Equipment AssemblyDocument56 pagesOperations and Maintenance Manual MAN-10000946 Elmar Grease Injection Equipment AssemblyAbhinav KumarNo ratings yet
- Physics SPM Paper 2 Tips 89 Modification and 11 Decision Making Question and AnswerDocument24 pagesPhysics SPM Paper 2 Tips 89 Modification and 11 Decision Making Question and Answerjirong100% (4)
- Radio Telescope Antenna Control System Modelling For Antenna Azimuth Position Using Simulink/MatlabDocument4 pagesRadio Telescope Antenna Control System Modelling For Antenna Azimuth Position Using Simulink/MatlabFahmy R. SaputriNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- c4 3rdyearDocument4 pagesc4 3rdyearMark Chow Khoon Keat0% (1)
- Ijert Ijert: Position Control of DC Motor by Compensating StrategiesDocument7 pagesIjert Ijert: Position Control of DC Motor by Compensating StrategiesR.SRIKANTHNo ratings yet
- c108 - WWW - Matlabi.ir - DC Motor Position Control Using State Space TechniqueDocument6 pagesc108 - WWW - Matlabi.ir - DC Motor Position Control Using State Space TechniqueMuhammad Ahsan AyubNo ratings yet
- MATLAB and Simulink Modelling of A Full State Observer Controller of Armature Controlled and Field Controlled DC Motor Using State Space ApproachDocument8 pagesMATLAB and Simulink Modelling of A Full State Observer Controller of Armature Controlled and Field Controlled DC Motor Using State Space ApproachNitsuga PomeloréNo ratings yet
- Ts Boost ConverterDocument6 pagesTs Boost Converterala houamNo ratings yet
- Control of An Active Rectifier With An Inductive Capacitive Inductive Filter Using A Twisting Based AlgorithmDocument6 pagesControl of An Active Rectifier With An Inductive Capacitive Inductive Filter Using A Twisting Based AlgorithmgilmartNo ratings yet
- Advanced Control System Lab PDFDocument15 pagesAdvanced Control System Lab PDFarpitg2208No ratings yet
- Current Mode Control of A Solar Inverter With MPPT ADOPTIVE AlgorithmDocument7 pagesCurrent Mode Control of A Solar Inverter With MPPT ADOPTIVE AlgorithmAnonymous afzpkOo3No ratings yet
- DC MotorDocument4 pagesDC MotorGetnet MekonnenNo ratings yet
- Genetic Algorithm Optimizes PI Controller for Induction Motor Speed ControlDocument8 pagesGenetic Algorithm Optimizes PI Controller for Induction Motor Speed Controlsri narmathaNo ratings yet
- Closed Loop Speed Control of A BLDC Motor Drive Prototype Using Position SensorDocument7 pagesClosed Loop Speed Control of A BLDC Motor Drive Prototype Using Position SensorKJLDSFMSKLNo ratings yet
- Design and Simulation Study of Electro-Mechanical Actuator For Missile ManeuveringDocument8 pagesDesign and Simulation Study of Electro-Mechanical Actuator For Missile ManeuveringSumanth KukutamNo ratings yet
- Comparative Study of Different Control Strategies For DstatcomDocument7 pagesComparative Study of Different Control Strategies For DstatcomAmmuRaNo ratings yet
- Active Damping Control of Hybrid Stepping Motor: Sheng-Ming Yang, Member, IEEE and Pei-Der SuDocument6 pagesActive Damping Control of Hybrid Stepping Motor: Sheng-Ming Yang, Member, IEEE and Pei-Der Su01689373477No ratings yet
- 1 SMDocument7 pages1 SMaswardi8756No ratings yet
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 pagesDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourNo ratings yet
- D.C control matlab روكانDocument17 pagesD.C control matlab روكانMustafa AlhumayreNo ratings yet
- Paris, FranceICSTEM (2019)Document6 pagesParis, FranceICSTEM (2019)Dr. D. V. KamathNo ratings yet
- PID Controller Using Rapid Control Prototyping TechniquesDocument11 pagesPID Controller Using Rapid Control Prototyping TechniquesAlay Camilo Lopez CastanoNo ratings yet
- A Passive Control For The Full-Bridge Buck InverterDC Motor SystemDocument5 pagesA Passive Control For The Full-Bridge Buck InverterDC Motor SystemiiscgovindraiNo ratings yet
- Model Reference Adaptive Control For DC Motor Based On SimulinkDocument6 pagesModel Reference Adaptive Control For DC Motor Based On SimulinkJubei YanaikiNo ratings yet
- 11 Robust Control of 2 Level12 PulseDocument7 pages11 Robust Control of 2 Level12 PulseRavi JainNo ratings yet
- Vector Control Simulation of AC MotorDocument16 pagesVector Control Simulation of AC MotorJosedocampocastro100% (1)
- Evaluation of Two Different Method For Speed Control of DC MotorDocument4 pagesEvaluation of Two Different Method For Speed Control of DC MotorUmer EhsanNo ratings yet
- Performance Analysis of A Single-Phase Ac Voltage Controller Under Induction Motor LoadDocument8 pagesPerformance Analysis of A Single-Phase Ac Voltage Controller Under Induction Motor LoadInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Load Frequency Control For A Two-Area HVAC/HVDC Power System Using Hybrid Genetic Algorithm ControllerDocument4 pagesLoad Frequency Control For A Two-Area HVAC/HVDC Power System Using Hybrid Genetic Algorithm ControllerSudhir KumarNo ratings yet
- CEP Control System Sp2019V2Document3 pagesCEP Control System Sp2019V2Ahmed AkramNo ratings yet
- Modelling and Advance Control Techniques For DC-DC Converter With Improve PerformanceDocument4 pagesModelling and Advance Control Techniques For DC-DC Converter With Improve PerformanceerpublicationNo ratings yet
- IJETR032919Document3 pagesIJETR032919erpublicationNo ratings yet
- Input-Output Linearization and Zero-Dynamics Control of Three-Phase AC/DC Voltage-Source ConvertersDocument12 pagesInput-Output Linearization and Zero-Dynamics Control of Three-Phase AC/DC Voltage-Source ConvertersAshik AhmedNo ratings yet
- Santa 2Document9 pagesSanta 2Vashik BedasieNo ratings yet
- Evaluation of Fuzzy Logic Control Technique For DC Motor Drives Using MAT LAB/SIMULINKDocument5 pagesEvaluation of Fuzzy Logic Control Technique For DC Motor Drives Using MAT LAB/SIMULINKerpublicationNo ratings yet
- Pole Placement by State Feedback in DC Motor by MatlabDocument13 pagesPole Placement by State Feedback in DC Motor by MatlabJason JonesNo ratings yet
- Phase Angle Control D STATCOMDocument8 pagesPhase Angle Control D STATCOMtabendaaarzuNo ratings yet
- Robust Adaptive Control of Direct Drive Brushless DC Motors and Applications T o Robotic ManipulatorstDocument6 pagesRobust Adaptive Control of Direct Drive Brushless DC Motors and Applications T o Robotic Manipulatorstbaoboi13112007No ratings yet
- Addis Ababa Science & Techenology UniverstyDocument5 pagesAddis Ababa Science & Techenology Universtyfiraol temesgenNo ratings yet
- Analysis of Speed Control of DC Motor Using LQR MethodDocument9 pagesAnalysis of Speed Control of DC Motor Using LQR MethodAli ErNo ratings yet
- Back-EMF Sensorless Control Algorithm For High Dynamics Performances PMSMDocument9 pagesBack-EMF Sensorless Control Algorithm For High Dynamics Performances PMSMSaranji GuruNo ratings yet
- Voltage Profile Improvement Using Static 48a88afcDocument5 pagesVoltage Profile Improvement Using Static 48a88afcharini shivNo ratings yet
- Application of DC/DC Buck Power Converter in DC Motor For Speed Controlling Using PI ControllerDocument5 pagesApplication of DC/DC Buck Power Converter in DC Motor For Speed Controlling Using PI ControllerShreeji ExportsNo ratings yet
- Model Reference Neural Adaptive Control Based BLDC Motor Speed ControlDocument6 pagesModel Reference Neural Adaptive Control Based BLDC Motor Speed ControlwaweeNo ratings yet
- Maintaining DC Voltage with Feedback ControlDocument8 pagesMaintaining DC Voltage with Feedback ControlFatih BurakNo ratings yet
- Particle Swarm Optimization For Improved Performance of PID Controller On Buck ConverterDocument5 pagesParticle Swarm Optimization For Improved Performance of PID Controller On Buck ConverterjamesNo ratings yet
- Chapter 3Document9 pagesChapter 3jahanviNo ratings yet
- Electric Power Systems Research: F. Beltran-Carbajal, A. Valderrabano-Gonzalez, J.C. Rosas-Caro, A. Favela-ContrerasDocument6 pagesElectric Power Systems Research: F. Beltran-Carbajal, A. Valderrabano-Gonzalez, J.C. Rosas-Caro, A. Favela-ContrerasAndrei GhitaNo ratings yet
- Direct Power Control of An AFE Using Predictive ControlDocument8 pagesDirect Power Control of An AFE Using Predictive Controlknighthood4allNo ratings yet
- Comparison of Different DC Motor Positioning Control AlgorithmsDocument6 pagesComparison of Different DC Motor Positioning Control Algorithmsfelres87No ratings yet
- Control of A Single-Stage Three-Phase Boost Power Factor Correction RectifierDocument6 pagesControl of A Single-Stage Three-Phase Boost Power Factor Correction RectifierGoriparthi SambasievaraavNo ratings yet
- Pitch and Yaw Attitude Control of A Rocket Engine Using Hybrid Fuzzy-PID ControllerDocument11 pagesPitch and Yaw Attitude Control of A Rocket Engine Using Hybrid Fuzzy-PID ControllermaryamNo ratings yet
- Modelling and Simulation For Industrial DC Motor Using Intelligent Control - ScienceDirectDocument6 pagesModelling and Simulation For Industrial DC Motor Using Intelligent Control - ScienceDirectMuhammad NurNo ratings yet
- 23D AdvanceDocument8 pages23D AdvancePATEL SWAPNEELNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Advanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesFrom EverandAdvanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesNo ratings yet
- 10.4 Part 3 - (FreeCourseWeb - Com)Document1 page10.4 Part 3 - (FreeCourseWeb - Com)faycelNo ratings yet
- 6.1 NO & NC Circuit Matrix - (FreeCourseWeb - Com)Document1 page6.1 NO & NC Circuit Matrix - (FreeCourseWeb - Com)faycelNo ratings yet
- 10.5 Original Circuit - (FreeCourseWeb - Com)Document1 page10.5 Original Circuit - (FreeCourseWeb - Com)faycelNo ratings yet
- المولدات التزامنية ثلاثية الأوجهDocument34 pagesالمولدات التزامنية ثلاثية الأوجهLuka MadridNo ratings yet
- 1.1 29. (Textbook) Prepositions of Direction or Motion PDFDocument4 pages1.1 29. (Textbook) Prepositions of Direction or Motion PDFfaycelNo ratings yet
- 3.1 Formula Sheet - (FreeCourseWeb - Com)Document1 page3.1 Formula Sheet - (FreeCourseWeb - Com)faycelNo ratings yet
- 5.1 7. (Textbook) Possessive Pronouns PDFDocument4 pages5.1 7. (Textbook) Possessive Pronouns PDFfaycelNo ratings yet
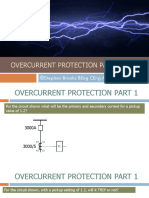
- 11.1 Overcurrent Protection Part 1 Quiz PDFDocument8 pages11.1 Overcurrent Protection Part 1 Quiz PDFfaycelNo ratings yet
- 2.3 Source Transformation-Slides PDFDocument4 pages2.3 Source Transformation-Slides PDFfaycelNo ratings yet
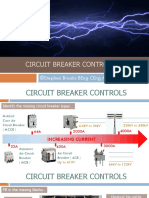
- 10.1 Circuit Breaker Controls Quiz PDFDocument10 pages10.1 Circuit Breaker Controls Quiz PDFfaycelNo ratings yet
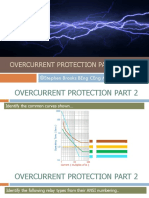
- 12.1 Overcurrent Protection Part 2 Quiz PDFDocument10 pages12.1 Overcurrent Protection Part 2 Quiz PDFfaycelNo ratings yet
- 13.1 Overcurrent Protection Part 3 Quiz PDFDocument8 pages13.1 Overcurrent Protection Part 3 Quiz PDFfaycelNo ratings yet
- 13.1 Overcurrent Protection Part 3 Quiz PDFDocument8 pages13.1 Overcurrent Protection Part 3 Quiz PDFfaycelNo ratings yet
- 2.3 Source Transformation-Slides PDFDocument4 pages2.3 Source Transformation-Slides PDFfaycelNo ratings yet
- 2.3 Source Transformation-Slides PDFDocument4 pages2.3 Source Transformation-Slides PDFfaycelNo ratings yet
- ملف يضم كل معادلات التكييف والتبريد كلها PDFDocument21 pagesملف يضم كل معادلات التكييف والتبريد كلها PDFfaycelNo ratings yet
- 12.1 Overcurrent Protection Part 2 Quiz PDFDocument10 pages12.1 Overcurrent Protection Part 2 Quiz PDFfaycelNo ratings yet
- 11.1 Overcurrent Protection Part 1 Quiz PDFDocument8 pages11.1 Overcurrent Protection Part 1 Quiz PDFfaycelNo ratings yet
- New Document Microsoft WordDocument3 pagesNew Document Microsoft WordfaycelNo ratings yet
- 1.2 Steady State Mesh-Slides PDFDocument4 pages1.2 Steady State Mesh-Slides PDFfaycelNo ratings yet
- DC Analysis of PWM Boost converter for CCM: Voltage and current equationsDocument11 pagesDC Analysis of PWM Boost converter for CCM: Voltage and current equationsfaycelNo ratings yet
- ChatLog Train Now 2017 - 05 - 02 20 - 10Document1 pageChatLog Train Now 2017 - 05 - 02 20 - 10faycelNo ratings yet
- State Feedback Integral Control by Velocity-Based Multiple Model NetworksDocument6 pagesState Feedback Integral Control by Velocity-Based Multiple Model NetworksfaycelNo ratings yet
- SolverTable HelpDocument13 pagesSolverTable HelpM Ibnu Aji DwiyantoNo ratings yet
- Proposed Changes to IRS-T-29-2000 CMS Crossing Manufacturing StandardsDocument11 pagesProposed Changes to IRS-T-29-2000 CMS Crossing Manufacturing StandardsShipra MishraNo ratings yet
- Dyeing Process Guide: Types, Machines & OptimizationDocument3 pagesDyeing Process Guide: Types, Machines & OptimizationVipin Singh KandholNo ratings yet
- Boeing 777Document5 pagesBoeing 777anon_874255349No ratings yet
- VingDocument8 pagesVingNguyễnĐắcĐạt100% (1)
- Export Catalouge 2017 (Full Catalouge) - 1Document62 pagesExport Catalouge 2017 (Full Catalouge) - 1Mari RadiantNo ratings yet
- MeasurementDocument65 pagesMeasurementChandreshDharDubeyNo ratings yet
- Ramon Magsaysay Memorial College-Marbel INC Bachelor of Science in Tourism ManagementDocument7 pagesRamon Magsaysay Memorial College-Marbel INC Bachelor of Science in Tourism ManagementRam G. MorteraNo ratings yet
- Factory Overhead Variances: Flexible Budget ApproachDocument4 pagesFactory Overhead Variances: Flexible Budget ApproachMeghan Kaye LiwenNo ratings yet
- TemplateDocument148 pagesTemplateWahyu Tri JuniantoNo ratings yet
- PH Probe For The PIC Temperature ControllerDocument6 pagesPH Probe For The PIC Temperature ControllerMohamad ZikriNo ratings yet
- Huarui Technologies Co.,Ltd VipDocument19 pagesHuarui Technologies Co.,Ltd Vipdrfaizal01No ratings yet
- Ubd WonderDocument13 pagesUbd Wonderapi-422461005100% (1)
- Populate Data From Database Into JTable in NetbeansDocument13 pagesPopulate Data From Database Into JTable in NetbeansSam Nil100% (1)
- Software Prototyping: ©ian Sommerville 2000 Software Engineering, 6th Edition. Chapter 8 Slide 1Document39 pagesSoftware Prototyping: ©ian Sommerville 2000 Software Engineering, 6th Edition. Chapter 8 Slide 1Prateek GuptaNo ratings yet
- Lobbying Vacations For CongressDocument54 pagesLobbying Vacations For CongressBigMamaTEANo ratings yet
- As 61800.3-2005 Adjustable Speed Electrical Power Drive Systems EMC Requirements and Specific Test MethodsDocument11 pagesAs 61800.3-2005 Adjustable Speed Electrical Power Drive Systems EMC Requirements and Specific Test MethodsSAI Global - APAC0% (1)
- Mobil Nuto H Series TdsDocument2 pagesMobil Nuto H Series TdswindiNo ratings yet
- DP-10/DP-10T/DP-11/DP-15/DP-18 Digital Ultrasonic Diagnostic Imaging SystemDocument213 pagesDP-10/DP-10T/DP-11/DP-15/DP-18 Digital Ultrasonic Diagnostic Imaging SystemDaniel JuarezNo ratings yet
- 1.4404 enDocument5 pages1.4404 enyraju88No ratings yet
- Second Year Hall Ticket DownloadDocument1 pageSecond Year Hall Ticket DownloadpanditphotohouseNo ratings yet
- Building A Two Wheeled Balancing RobotDocument120 pagesBuilding A Two Wheeled Balancing RobotCp Em PheeradorNo ratings yet
- Product Overview - COMFORT OVERVIEWDocument16 pagesProduct Overview - COMFORT OVERVIEWDam Ngoc KienNo ratings yet