You might also like
- Operacion VolvoooDocument102 pagesOperacion VolvoooASERCAT SAC - CERTIFICADOS100% (5)
- Astrologia HorariaDocument67 pagesAstrologia HorariaKiwita KuchitNo ratings yet
- 20 Tips Sobre La Escritura de CancionesDocument5 pages20 Tips Sobre La Escritura de Cancioneschrismorab100% (3)
- Programa de ProduccionDocument13 pagesPrograma de ProduccionJakelin Poma JulcaNo ratings yet
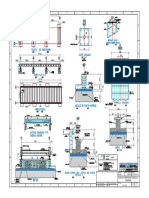
- Plano BalanzaDocument1 pagePlano BalanzaXavier VillegasNo ratings yet
- Ejercicios de VigasDocument22 pagesEjercicios de VigasNohely VillavicencioNo ratings yet
- Introducción A Los Motores de CombustiónDocument187 pagesIntroducción A Los Motores de Combustiónmgy20No ratings yet
- Herramientas Básicas para La Gestión en Procesos de NegociosDocument5 pagesHerramientas Básicas para La Gestión en Procesos de NegociosHector Tovilla Rivera100% (1)
- Presentación Lingüística en El Siglo XXDocument78 pagesPresentación Lingüística en El Siglo XXRicardoNo ratings yet
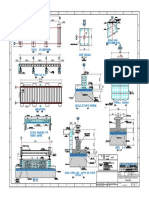
- Plano BalanzaDocument1 pagePlano BalanzaXavier VillegasNo ratings yet
- Sistema de vigilancia térmico industrial HazwatDocument3 pagesSistema de vigilancia térmico industrial HazwatXavier VillegasNo ratings yet
- Quick Test 2 (10 - 10) - Revisión Del IntentoDocument7 pagesQuick Test 2 (10 - 10) - Revisión Del IntentoXavier VillegasNo ratings yet
- Cámaras ProformasDocument3 pagesCámaras ProformasXavier VillegasNo ratings yet
- Seguridad Garita PlanoDocument1 pageSeguridad Garita PlanoXavier VillegasNo ratings yet
- Ampliación Acería ANDECDocument1 pageAmpliación Acería ANDECXavier VillegasNo ratings yet
- Indicada: ASTM36Document1 pageIndicada: ASTM36Xavier VillegasNo ratings yet
- Ampliación AceríaDocument1 pageAmpliación AceríaXavier VillegasNo ratings yet
- Documento Cámara TermicaDocument1 pageDocumento Cámara TermicaXavier VillegasNo ratings yet
- Hangar PetroAmazonasDocument1 pageHangar PetroAmazonasXavier VillegasNo ratings yet
- Puente Río Tigre - PastazaDocument1 pagePuente Río Tigre - PastazaXavier VillegasNo ratings yet
- Estructura Edificio EMAPADocument1 pageEstructura Edificio EMAPAXavier VillegasNo ratings yet
- Vista Lateral CamperDocument1 pageVista Lateral CamperXavier VillegasNo ratings yet
- Ens AmbleDocument1 pageEns AmbleXavier VillegasNo ratings yet
- MOTORES DE AUTOMOVIL Jovac 1982Document323 pagesMOTORES DE AUTOMOVIL Jovac 1982Xavier VillegasNo ratings yet
- Ejer Maq Elec 2Document3 pagesEjer Maq Elec 2Xavier VillegasNo ratings yet
- ExplotadoDocument1 pageExplotadoXavier VillegasNo ratings yet
- Máquinas SíncronasDocument14 pagesMáquinas SíncronasChristian Galarza CruzNo ratings yet
- Plano CamperDocument1 pagePlano CamperXavier VillegasNo ratings yet
- Principios generales de las máquinas eléctricasDocument21 pagesPrincipios generales de las máquinas eléctricasXavier VillegasNo ratings yet
- Conceptos4 - Máquinas SíncronasDocument1 pageConceptos4 - Máquinas SíncronasXavier VillegasNo ratings yet
- TrabajoIndividual Yanez VictorDocument3 pagesTrabajoIndividual Yanez VictorXavier VillegasNo ratings yet
- Maqelec 6Document18 pagesMaqelec 6Xavier VillegasNo ratings yet
- Maqelec 5Document9 pagesMaqelec 5Xavier VillegasNo ratings yet
- Maqelec 7Document12 pagesMaqelec 7Xavier VillegasNo ratings yet
- Conceptos ImportantesDocument2 pagesConceptos ImportantesXavier VillegasNo ratings yet
- SilaboDocument4 pagesSilaboXavier VillegasNo ratings yet
- Conceptos3 MaqInduccionDocument2 pagesConceptos3 MaqInduccionXavier VillegasNo ratings yet
- 02.formato Clase 02Document22 pages02.formato Clase 02diego guzmanNo ratings yet
- Metodología Wilson Grupo7Document3 pagesMetodología Wilson Grupo7Jean JaramilloNo ratings yet
- Breve InformeDocument4 pagesBreve InformeGAGONSALENo ratings yet
- Calculo de Resistencias Limitadoras y Diodo ZenerDocument5 pagesCalculo de Resistencias Limitadoras y Diodo ZenerPedritoTorresHerediaNo ratings yet
- Caracterización de La Pobreza en Baja VerapazDocument78 pagesCaracterización de La Pobreza en Baja Verapazfernando_ortíz_34No ratings yet
- Es Wix ComDocument5 pagesEs Wix ComDanny AvilaNo ratings yet
- Asnos estúpidos en la TierraDocument2 pagesAsnos estúpidos en la TierraDa ElaNo ratings yet
- Instructivo Genérico Estudiantes ENE Habilidades 2023Document8 pagesInstructivo Genérico Estudiantes ENE Habilidades 2023Nataly palmaNo ratings yet
- Prueba de Hipotesis de Chi CuadradoDocument49 pagesPrueba de Hipotesis de Chi CuadradoEriksen Mallma MoránNo ratings yet
- DiscriminacionDocument1 pageDiscriminacionAlessandro ChamorroNo ratings yet
- Peering Through The Nuclear Pore Complex Structure, Assembly and FuctionDocument15 pagesPeering Through The Nuclear Pore Complex Structure, Assembly and FuctionJuan Andres Fernández MNo ratings yet
- Inducción Basica de SeguridadDocument97 pagesInducción Basica de Seguridadnayadeth urbaezNo ratings yet
- Microeconomia Preguntas de Repaso Capitulo 4 1c Leydi GarnicaDocument6 pagesMicroeconomia Preguntas de Repaso Capitulo 4 1c Leydi GarnicaFatima GarnicaNo ratings yet
- Observaciones Segundo GradoDocument2 pagesObservaciones Segundo GradoBlanca Ines Cruz SebastianNo ratings yet
- DIA Proyecto Ampliacion Servicio Energia Electirca CP ChenchenDocument133 pagesDIA Proyecto Ampliacion Servicio Energia Electirca CP Chenchenyois casamayorNo ratings yet
- PCR (Reacción en Cadena de La Polimerasa)Document15 pagesPCR (Reacción en Cadena de La Polimerasa)Andrea MendozaNo ratings yet
- Tema 6 Teoría Unid. EstratigraficasDocument22 pagesTema 6 Teoría Unid. EstratigraficasCarlos Gonzalez VergaraNo ratings yet
- Administración de ventas: Factores clave y tendencias actualesDocument6 pagesAdministración de ventas: Factores clave y tendencias actualeshugazzzoNo ratings yet
- Adulto MayorDocument5 pagesAdulto MayorJACK EDINSON PORTILLA RODRIGUEZNo ratings yet
- Impulso Zapotlanejo Agosto 2010Document10 pagesImpulso Zapotlanejo Agosto 2010El Portal ZapotlanejoNo ratings yet
- Ya - +problemasDocument8 pagesYa - +problemasescorNo ratings yet
- Charter-SW-ManualUsuarioDocument2 pagesCharter-SW-ManualUsuariotecnologia para el cambioNo ratings yet