You might also like
- الحاسبات 1920 3 رسوم الحاسوبDocument81 pagesالحاسبات 1920 3 رسوم الحاسوبazmiNo ratings yet
- DC66Document6 pagesDC66funnyclups413No ratings yet
- Computer Graphics Lecture NotesDocument63 pagesComputer Graphics Lecture NotespraveennallavellyNo ratings yet
- CG Scanner Part 1Document25 pagesCG Scanner Part 1Vaishnavi Das C HNo ratings yet
- Computer Based CGMDocument62 pagesComputer Based CGMswathiNo ratings yet
- Two Marks - Part - 1Document14 pagesTwo Marks - Part - 1sathyaaaaa1No ratings yet
- Image Processing: Characteristics of Image OperationsDocument11 pagesImage Processing: Characteristics of Image OperationsRam2646No ratings yet
- CGMANUALFINALDocument19 pagesCGMANUALFINALPaypal BusinessNo ratings yet
- Unit 1 Basics of Computer Graphics - FinalDocument22 pagesUnit 1 Basics of Computer Graphics - FinalYASH PHADOLNo ratings yet
- Graphics FunctionDocument10 pagesGraphics FunctionRaj SuraseNo ratings yet
- Wa0003.Document36 pagesWa0003.subha sriNo ratings yet
- Embed Lab7Document6 pagesEmbed Lab7Seamap VietnamNo ratings yet
- CSE - Computer Graphics PDFDocument63 pagesCSE - Computer Graphics PDFHâckër's WørldNo ratings yet
- Computer Graphics NotesDocument62 pagesComputer Graphics NotesAditya SinghNo ratings yet
- Computer-Graphics U1 PDFDocument11 pagesComputer-Graphics U1 PDFKunal MohantyNo ratings yet
- Computer GraphicsDocument63 pagesComputer GraphicsKour NeetuNo ratings yet
- Resolution Independent Curve Rendering Using Programmable Graphics HardwareDocument10 pagesResolution Independent Curve Rendering Using Programmable Graphics HardwarearanhilNo ratings yet
- CG Unit 1Document21 pagesCG Unit 1mahiNo ratings yet
- Graph-Lecture 1 IntroductionDocument10 pagesGraph-Lecture 1 IntroductionasmaaNo ratings yet
- CG 2019 SolutionDocument19 pagesCG 2019 SolutionSachin SharmaNo ratings yet
- Computer Graphics Lecture 4Document55 pagesComputer Graphics Lecture 4Crystal DzebuNo ratings yet
- 5CS4 SolutionDocument4 pages5CS4 SolutionanilNo ratings yet
- Application of Computer GraphicsDocument3 pagesApplication of Computer GraphicsMushtaq AhmedNo ratings yet
- Image Processing: Presented byDocument15 pagesImage Processing: Presented byAyesha MeghaNo ratings yet
- Fmcet: Fatima Michael College of Engineering & TechnologyDocument67 pagesFmcet: Fatima Michael College of Engineering & TechnologyDeepa PNo ratings yet
- Tutorial 675Document11 pagesTutorial 675Frimpong Justice AlexNo ratings yet
- Introduction To Matlab Plotting: Data VisualizationDocument8 pagesIntroduction To Matlab Plotting: Data VisualizationLindi NewmanNo ratings yet
- CG VivaDocument10 pagesCG VivaSantOsh JamaDarNo ratings yet
- SC1003 Ex 6 - DecompositionDocument6 pagesSC1003 Ex 6 - DecompositionMildred LeeNo ratings yet
- Computer Graphics FileDocument92 pagesComputer Graphics FileKanika VermaNo ratings yet
- Unit 1 Basics of Computer GraphicsDocument16 pagesUnit 1 Basics of Computer Graphicssuyash magdum c.o 337No ratings yet
- EC32Document10 pagesEC32raghu_srinu08480No ratings yet
- CS2401 - Computer Graphics Question Bank - UNIT IDocument5 pagesCS2401 - Computer Graphics Question Bank - UNIT IGanga Dharan100% (1)
- Digital Image ProcessingDocument9 pagesDigital Image ProcessingRini SujanaNo ratings yet
- CS6504 (R-13) Uw 2013 RegulationDocument67 pagesCS6504 (R-13) Uw 2013 RegulationkhooniNo ratings yet
- CG Viva+questions+&ANSWERSDocument13 pagesCG Viva+questions+&ANSWERSJinsKJoy75% (4)
- RTU Solution 5CS4-04 Computer Graphics & MultimediaDocument43 pagesRTU Solution 5CS4-04 Computer Graphics & MultimediaShrinath TailorNo ratings yet
- Ku 5Th Sem Assignment - Bsit (Ta) - 51 (Graphics & Multimedia)Document4 pagesKu 5Th Sem Assignment - Bsit (Ta) - 51 (Graphics & Multimedia)Rachit KhandelwalNo ratings yet
- Mid Sem 2090 Summer 2022Document7 pagesMid Sem 2090 Summer 2022pubg clipsNo ratings yet
- Question BankDocument43 pagesQuestion BankDhilip PrabakaranNo ratings yet
- Convolution Neural Network: CP - 6 Machine Learning M S PrasadDocument37 pagesConvolution Neural Network: CP - 6 Machine Learning M S PrasadMani S Prasad100% (1)
- CS212-Graphics and MultimediaDocument9 pagesCS212-Graphics and Multimediatn_thangaveluNo ratings yet
- Hear50265 ch03Document88 pagesHear50265 ch03Suada Bőw WéěžýNo ratings yet
- Interactive and Passive GraphicsDocument41 pagesInteractive and Passive GraphicsLovemoreSolomonNo ratings yet
- Cse-Vi-computer Graphics and Visualization (10cs65) - SolutionDocument77 pagesCse-Vi-computer Graphics and Visualization (10cs65) - SolutionShinu Gopal MNo ratings yet
- GM Unit1Document89 pagesGM Unit1minNo ratings yet
- BSC IT 5th Sem Assignment Solved AnswerDocument45 pagesBSC IT 5th Sem Assignment Solved AnswerAmarChaudaryNo ratings yet
- 3D Graphics With OpenGL - The Basic TheoryDocument22 pages3D Graphics With OpenGL - The Basic Theoryعبدالرحمن إحسانNo ratings yet
- Computer Graphics & MultimediaDocument9 pagesComputer Graphics & MultimediaMathan NaganNo ratings yet
- English 1st SemDocument34 pagesEnglish 1st SemSRUJAN KALYANNo ratings yet
- CUDA Implementation of A Biologically Inspired Object Recognition SystemDocument5 pagesCUDA Implementation of A Biologically Inspired Object Recognition Systemproxymo1No ratings yet
- Computer Graphics Lab ManualDocument61 pagesComputer Graphics Lab ManualVivek KvNo ratings yet
- Bubble SortDocument29 pagesBubble SortBhavneet KaurNo ratings yet
- Computer Graphics - Important Question and AnswersDocument9 pagesComputer Graphics - Important Question and AnswersR Anirudh ChelseaNo ratings yet
- Graphics ProgrammingDocument42 pagesGraphics Programmingapi-383742175% (4)
- Histogram Equalization: Enhancing Image Contrast for Enhanced Visual PerceptionFrom EverandHistogram Equalization: Enhancing Image Contrast for Enhanced Visual PerceptionNo ratings yet
- Knuckle Joint: Design Procedure, Problems and QuestionsDocument11 pagesKnuckle Joint: Design Procedure, Problems and QuestionscaveshgmailcomNo ratings yet
- Design Data BookDocument639 pagesDesign Data BookVasanth Chakravarthy100% (2)
- Turn BuckleDocument5 pagesTurn BucklecaveshgmailcomNo ratings yet
- Design of Unprotected Flange CouplingDocument7 pagesDesign of Unprotected Flange CouplingcaveshgmailcomNo ratings yet
- Design of Screw JackDocument3 pagesDesign of Screw JackcaveshgmailcomNo ratings yet
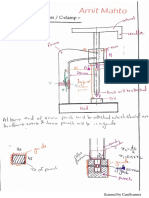
- Design of Press ScrewDocument10 pagesDesign of Press ScrewcaveshgmailcomNo ratings yet
- Design of C - ClampDocument4 pagesDesign of C - ClampcaveshgmailcomNo ratings yet
- Formation of Boundary LayerDocument11 pagesFormation of Boundary LayercaveshgmailcomNo ratings yet
- Sem 3 Time TableDocument2 pagesSem 3 Time TablecaveshgmailcomNo ratings yet
- FM IMP Chapter 2 TO 6Document1 pageFM IMP Chapter 2 TO 6caveshgmailcomNo ratings yet
- 3 Night 4 Day Goa Enquirry No 1177Document2 pages3 Night 4 Day Goa Enquirry No 1177caveshgmailcomNo ratings yet
- Crash 2019 Time TableDocument2 pagesCrash 2019 Time TablecaveshgmailcomNo ratings yet
- FM IMP Chapter 2 TO 6Document1 pageFM IMP Chapter 2 TO 6caveshgmailcomNo ratings yet
- Epf 10CDocument4 pagesEpf 10Csandee1983No ratings yet
- ME Product Design and Development CHBCGS 2016Document76 pagesME Product Design and Development CHBCGS 2016caveshgmailcomNo ratings yet
- Excellent Pamphlet CC 2Document2 pagesExcellent Pamphlet CC 2caveshgmailcomNo ratings yet
- PED and PipingDocument8 pagesPED and PipingcaveshgmailcomNo ratings yet
- EVS MCQDocument39 pagesEVS MCQcaveshgmailcomNo ratings yet
- Chapter 1 BDDocument29 pagesChapter 1 BDcaveshgmailcomNo ratings yet
- 7.powder Metallurgy 14Document28 pages7.powder Metallurgy 14caveshgmailcomNo ratings yet
- Euclidean vs. Noneuclidean GeometryDocument3 pagesEuclidean vs. Noneuclidean Geometryqtstar100% (7)
- Chapter 4 Torsion PDFDocument30 pagesChapter 4 Torsion PDFadlinasir67% (3)
- 2015-16 Aps Fifth Grade Curriculum MapDocument6 pages2015-16 Aps Fifth Grade Curriculum Mapapi-291816007No ratings yet
- Trigonometry: Angle Measures Triangles RightDocument9 pagesTrigonometry: Angle Measures Triangles RightAngel PedragozaNo ratings yet
- 30 Case Study Nakheel Tower The Vertical CityDocument8 pages30 Case Study Nakheel Tower The Vertical CityAR UmairNo ratings yet
- 1078 BenjaminDocument7 pages1078 BenjaminwarisNo ratings yet
- Datamine Command TableDocument33 pagesDatamine Command TableYang JadeNo ratings yet
- Assignment1Document2 pagesAssignment1Kapish AroraNo ratings yet
- GMAT Arithmetic Formula ListDocument4 pagesGMAT Arithmetic Formula ListCynthia J. HendershotNo ratings yet
- Service Tower Problem - Solutions: Adapted From Module 2: Worksheet 6 in Precalculus: Pathways To CalculusDocument5 pagesService Tower Problem - Solutions: Adapted From Module 2: Worksheet 6 in Precalculus: Pathways To Calculusapi-287216602100% (1)
- Midterm ExamDocument2 pagesMidterm Examsir jjNo ratings yet
- Surface ModelingDocument40 pagesSurface ModelingrdksjNo ratings yet
- 4PM1 01 Que 20201120Document32 pages4PM1 01 Que 20201120Little Wizard100% (3)
- Analytic Geometry PDFDocument2 pagesAnalytic Geometry PDFEleonor Mhey CaridoNo ratings yet
- M2 Notes Student Version Part 2Document48 pagesM2 Notes Student Version Part 2liNo ratings yet
- 6 Folds II FieldDocument33 pages6 Folds II FieldDeepesh KhandelwalNo ratings yet
- Gen Ed Math ReviewerDocument5 pagesGen Ed Math ReviewerCharlene FiguracionNo ratings yet
- Drafting 8Document3 pagesDrafting 8Jesselle CelestialNo ratings yet
- 202 WorksheetDocument3 pages202 WorksheetVirginia HicksNo ratings yet
- 1599 PDFDocument12 pages1599 PDFIndira BanerjeeNo ratings yet
- History of Greek Literature (1850)Document530 pagesHistory of Greek Literature (1850)Neven VuckovicNo ratings yet
- Code Learning ObjectivesDocument4 pagesCode Learning ObjectivesLiviaAsriNo ratings yet
- Chapter-3 M1Document54 pagesChapter-3 M1Aisha QasimNo ratings yet
- 1st Year Physics Halfyearly Important QuestionsDocument3 pages1st Year Physics Halfyearly Important QuestionsmohiuddinmanzoorsyedNo ratings yet
- Department of Software Engineering - Time Table - Spring 2022Document1 pageDepartment of Software Engineering - Time Table - Spring 2022Meer Shair MeerNo ratings yet
- AutoCAD Complete Lab Work ManualDocument131 pagesAutoCAD Complete Lab Work ManualAbdul Rehman FaisalNo ratings yet
- AS Math October 2020 P4 QPDocument32 pagesAS Math October 2020 P4 QPHaifa HasanNo ratings yet
- 01-12-19 - Sri Chaitanya-Sr - Chaina-I - L-I & II - Jee-Adv - 2018-P2 - CTA-6 - Key & Sol'sDocument20 pages01-12-19 - Sri Chaitanya-Sr - Chaina-I - L-I & II - Jee-Adv - 2018-P2 - CTA-6 - Key & Sol'sSridhar ReddyNo ratings yet
- Lesson7 AnglesDocument25 pagesLesson7 AnglesMARVELYN VALLENTENo ratings yet
- Maths Question Papers For Revision For Tenth Class Ap BoardDocument31 pagesMaths Question Papers For Revision For Tenth Class Ap BoardJagadeesh ThatipamulaNo ratings yet