You might also like
- MEC 442 Water Pump AssignmentDocument8 pagesMEC 442 Water Pump AssignmentHafizi ZaidiNo ratings yet
- Free Fall ReportDocument8 pagesFree Fall ReportwanzalezNo ratings yet
- Strength Lab Report (Exp 2) Update 1Document14 pagesStrength Lab Report (Exp 2) Update 1Syafiq RonaldoNo ratings yet
- Flow Through Venturi Tube and Orifice Plate 2021Document17 pagesFlow Through Venturi Tube and Orifice Plate 2021Arief HakeemNo ratings yet
- Gantt Chart (Fabrication and Testing Durian Crepe Folding Machine)Document1 pageGantt Chart (Fabrication and Testing Durian Crepe Folding Machine)Akmal HassanNo ratings yet
- SWOT Analysis TasekDocument4 pagesSWOT Analysis Taseknor aimanNo ratings yet
- Mec411 Common AssignmentDocument21 pagesMec411 Common AssignmentAmreeNo ratings yet
- HR Management PerspectivesDocument39 pagesHR Management PerspectivesAirin SamuelNo ratings yet
- EMM 3502 LAB MANUAL - PRESSURE CONTROL SYSTEM TUNINGDocument7 pagesEMM 3502 LAB MANUAL - PRESSURE CONTROL SYSTEM TUNINGPuti FikriNo ratings yet
- MEC551 Assignment - Design SEPT2019Document5 pagesMEC551 Assignment - Design SEPT2019Nur Atiqah Nabila0% (1)
- Refrigerent LaboratoryDocument18 pagesRefrigerent LaboratoryKRG KickFlashNo ratings yet
- Angular Position (FULL REPORT)Document19 pagesAngular Position (FULL REPORT)Farid AsyrafNo ratings yet
- SKF3013 - Manual Amali PDFDocument26 pagesSKF3013 - Manual Amali PDFhazwani safuraNo ratings yet
- Lab Report Phy547. Exp 1docxDocument14 pagesLab Report Phy547. Exp 1docxAtikah IzzatiNo ratings yet
- Exp 3Document8 pagesExp 3ValentinoDullSatinNo ratings yet
- MEC522 PBL - ArduinoDC - MotorEncoder - Close LoopDocument3 pagesMEC522 PBL - ArduinoDC - MotorEncoder - Close Loopzaiful hakimNo ratings yet
- Lab Report 1Document10 pagesLab Report 1amirNo ratings yet
- Observations and FindingsDocument2 pagesObservations and FindingsJustin Mark AgtingNo ratings yet
- Test 2 MEC 531 DEC 2018 Ans SchemeDocument9 pagesTest 2 MEC 531 DEC 2018 Ans SchemeFadhil Aiman100% (1)
- Mec 424 - Laboratory Report Title:Introduction To Sample Preparation and Optical Microscope For Metallographic ObservationDocument20 pagesMec 424 - Laboratory Report Title:Introduction To Sample Preparation and Optical Microscope For Metallographic ObservationTaufiq MahathirNo ratings yet
- Fila Table MathsDocument3 pagesFila Table MathsAsdia Aseffah FathiyaNo ratings yet
- Personal Introduction With Photo: RD ND STDocument5 pagesPersonal Introduction With Photo: RD ND STAliNo ratings yet
- B2-1 (T&H 1) PDFDocument40 pagesB2-1 (T&H 1) PDFAhmad SyamilNo ratings yet
- Lab ManuDocument12 pagesLab ManuMuhd Muzafar100% (1)
- UiTM Sheet Metal Report Form GuideDocument7 pagesUiTM Sheet Metal Report Form Guideafif lah100% (1)
- Graph Void Ratio Vs Effective StressDocument6 pagesGraph Void Ratio Vs Effective StressNitrogenn GassNo ratings yet
- Proposal Mec435Document12 pagesProposal Mec435Mohd Sayyid Mu'ammarNo ratings yet
- Azar Lab1 Mem564Document9 pagesAzar Lab1 Mem564AZAR DANFUDI NAMAZINo ratings yet
- Elc 590 Persuasive SpeechDocument8 pagesElc 590 Persuasive SpeechMimi Malina Jamaluddin100% (2)
- Inventory Management System for Tastiway Sdn BhdDocument94 pagesInventory Management System for Tastiway Sdn BhdYee Hooi100% (1)
- Effects of Trans-Polyoctenamer on Properties of Rubberized BitumenDocument19 pagesEffects of Trans-Polyoctenamer on Properties of Rubberized BitumenAkashahZakariaNo ratings yet
- Experiment 2Document5 pagesExperiment 2Alya HaifaNo ratings yet
- CEL 2106 THT - Week 6Document1 pageCEL 2106 THT - Week 6Mohd Azman SuwandiNo ratings yet
- MEC554 Lab HandoutDocument60 pagesMEC554 Lab HandoutHilmiAhmadNo ratings yet
- Yayasan Melaka V Photran Corp SDN BHD & AnorDocument27 pagesYayasan Melaka V Photran Corp SDN BHD & AnorSeng Wee Toh0% (1)
- Lab Report Exp 3-Phy443Document10 pagesLab Report Exp 3-Phy443firdausNo ratings yet
- University Tun Hussein Onn Malaysia Field Trip ReportDocument6 pagesUniversity Tun Hussein Onn Malaysia Field Trip ReportShida Shidot100% (1)
- Uitm Lab ReportDocument4 pagesUitm Lab ReportShark MJNo ratings yet
- MEC435Proposal Bike Chocks (15.10) 2.51AMDocument20 pagesMEC435Proposal Bike Chocks (15.10) 2.51AMIkhmal AlifNo ratings yet
- TPT 550 Assignment 1Document6 pagesTPT 550 Assignment 1Irdeena Nabila ZamriNo ratings yet
- Cover Page - PHY094 Entrepreneurial Mindset Assignment - StudentDocument2 pagesCover Page - PHY094 Entrepreneurial Mindset Assignment - StudentApik YaaNo ratings yet
- POM - Assignment 2 - Nov 2015Document10 pagesPOM - Assignment 2 - Nov 2015Saima JafariNo ratings yet
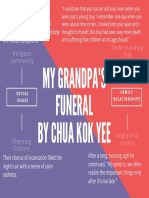
- My Grandpa's FuneralDocument1 pageMy Grandpa's FuneralTSLB-0619 Salsabila Ainaa Binti RosliNo ratings yet
- Swot Analysis Tasek CorpDocument5 pagesSwot Analysis Tasek CorpSri SarveentaranNo ratings yet
- Presentation Proposal (EWC661)Document9 pagesPresentation Proposal (EWC661)fatin naddNo ratings yet
- Broom Manufacture Machine: StartDocument62 pagesBroom Manufacture Machine: StartHaziq PazliNo ratings yet
- Report HVAC Exp1 UthmDocument5 pagesReport HVAC Exp1 UthmIdinNo ratings yet
- Lesson Plan Phy534 Sept 2019-Dr ZuriantiDocument2 pagesLesson Plan Phy534 Sept 2019-Dr ZuriantiAnonymous HE1fm4No ratings yet
- Lab 2-WBGTDocument12 pagesLab 2-WBGTYusrina AfifaNo ratings yet
- Sem I 2020-2021 Software Quiz (Chapters 2, 3 5)Document5 pagesSem I 2020-2021 Software Quiz (Chapters 2, 3 5)Syahema SalehNo ratings yet
- MEC424 Content TensileDocument13 pagesMEC424 Content TensileHaFiy HaZim0% (1)
- EWC 661 Portfolio SampleDocument112 pagesEWC 661 Portfolio SampleNUR IZZATI RIDZUANNo ratings yet
- Sample For Students Mec435Document6 pagesSample For Students Mec435Syafiq FauziNo ratings yet
- Jominy-End Quench TestDocument16 pagesJominy-End Quench TestFirdaus Asry33% (3)
- CAD Lab Project UNITENDocument5 pagesCAD Lab Project UNITENSyafiq FauziNo ratings yet
- Music RC 315Document25 pagesMusic RC 315Amir Alisty100% (1)
- (Question) Mat 491 Final Assessment 6aug2021 3PM-5PMDocument4 pages(Question) Mat 491 Final Assessment 6aug2021 3PM-5PMfirdausNo ratings yet
- Physical Chemistry (471) : Faculty of Applied Sciences Laboratory ReportDocument19 pagesPhysical Chemistry (471) : Faculty of Applied Sciences Laboratory ReportHusna Insyirah Bt SamadNo ratings yet
- Cad and Tappet Full ReportDocument30 pagesCad and Tappet Full ReportRubaveeran GunasegaranNo ratings yet
- Crank and slider mechanism lab experiment resultsDocument18 pagesCrank and slider mechanism lab experiment resultsAfif HaziqNo ratings yet
- Formula For Risk ForexDocument2 pagesFormula For Risk ForexmonsterpeqNo ratings yet
- Formula Winning Losing Using IndicatorDocument2 pagesFormula Winning Losing Using IndicatormonsterpeqNo ratings yet
- Formula Winning Losing Using IndicatorDocument2 pagesFormula Winning Losing Using IndicatormonsterpeqNo ratings yet
- Machine Design Lab Procedure TheoryDocument10 pagesMachine Design Lab Procedure TheoryMuhammad Taufiq YusofNo ratings yet
- Experiment 3 Pro 1 BlueDocument1 pageExperiment 3 Pro 1 BluemonsterpeqNo ratings yet
- New Rich Text DocumentDocument1 pageNew Rich Text DocumentCoOl DiShu RockinNo ratings yet
- Therapy Physics - Review - Part 1 PDFDocument62 pagesTherapy Physics - Review - Part 1 PDFcarlosqueiroz7669100% (3)
- Work Energy Power Quiz AnswersDocument4 pagesWork Energy Power Quiz AnswersLim Kew ChongNo ratings yet
- Eng10003 20S1 W09L08Document41 pagesEng10003 20S1 W09L08Murugaa VengadasanNo ratings yet
- Effect Distributed GenerationDocument8 pagesEffect Distributed GenerationIndra S WahyudiNo ratings yet
- ActivityDocument3 pagesActivityNeil Paolo MirandaNo ratings yet
- Shape Factor & Modulus of Elasticity Urethane RubberDocument6 pagesShape Factor & Modulus of Elasticity Urethane Rubberbman0051401No ratings yet
- Calculation of maximum pressure rise and surge pressure in water pipelineDocument7 pagesCalculation of maximum pressure rise and surge pressure in water pipelineSameer MinhajNo ratings yet
- 841 Specific GravityDocument1 page841 Specific GravityJam SkyNo ratings yet
- The Standard Model of Particle PhysicsDocument7 pagesThe Standard Model of Particle PhysicsTrisha BowenNo ratings yet
- BMG Gao2006Document18 pagesBMG Gao2006Amina DinariNo ratings yet
- Structure Lab-Strut BucklingDocument7 pagesStructure Lab-Strut BucklingFendi RoonNo ratings yet
- ECSS E HB 31 01 - Part14A Cryogenic CoolingDocument545 pagesECSS E HB 31 01 - Part14A Cryogenic CoolingGuillermo MartínezNo ratings yet
- Final Term Exam and Quiz MENGR 3100Document3 pagesFinal Term Exam and Quiz MENGR 3100ERICA ZOE CAYTONNo ratings yet
- Aetheric Tube Alignment With The Earth GridDocument9 pagesAetheric Tube Alignment With The Earth GridShivaram RamNo ratings yet
- EEE 465 Breakdown MechanismsDocument16 pagesEEE 465 Breakdown MechanismsMd IbtidaNo ratings yet
- Steel connection design check summaryDocument18 pagesSteel connection design check summaryDaniel TuerosNo ratings yet
- Single Correct Answer Type: 1.: U G U G U G U GDocument19 pagesSingle Correct Answer Type: 1.: U G U G U G U GAnonymous afoBhIv6fNo ratings yet
- Closing The Gaps in Inertial Motion Tracking (MUSE - Magnitometer-Cenrtic Sensor Fusion) (Romit Roy Choudhury) (2018) (PPTX)Document60 pagesClosing The Gaps in Inertial Motion Tracking (MUSE - Magnitometer-Cenrtic Sensor Fusion) (Romit Roy Choudhury) (2018) (PPTX)ip01No ratings yet
- Stabilization of Nonlinear Systems: Control Lyapunov Function ApproachDocument6 pagesStabilization of Nonlinear Systems: Control Lyapunov Function ApproachSaeb AmirAhmadi ChomacharNo ratings yet
- Mid Term Exam MCQ'sDocument2 pagesMid Term Exam MCQ'sAbdul Khaliq KhanNo ratings yet
- Lecture Notes - Metal Forming PDFDocument68 pagesLecture Notes - Metal Forming PDFIrfan KhanNo ratings yet
- IS:3955 Based On Shear Criteria Based On Settlement Criteria Based On Settlement Criteria (Formula)Document2 pagesIS:3955 Based On Shear Criteria Based On Settlement Criteria Based On Settlement Criteria (Formula)Dileep singhNo ratings yet
- Electrical Fundamentals: What is Electricity and How is it MeasuredDocument76 pagesElectrical Fundamentals: What is Electricity and How is it MeasuredLaveen RaghunamNo ratings yet
- PTG14 Oh4Document37 pagesPTG14 Oh4Hifni Shofiyul AmaliNo ratings yet
- ANSYS Autodyn Composite ModelingDocument70 pagesANSYS Autodyn Composite Modelinggustavo5150No ratings yet
- Describe The Shape of The Plastic Zone Ahead of A Crack Tip and Particularly How This Varies Between Plane Stress and Plane Strain SituationsDocument6 pagesDescribe The Shape of The Plastic Zone Ahead of A Crack Tip and Particularly How This Varies Between Plane Stress and Plane Strain SituationsAndrew SpiteriNo ratings yet
- Ground Sensor ETOG 56 - ETOK 1Document8 pagesGround Sensor ETOG 56 - ETOK 1cinefil70No ratings yet
- Physics LabDocument12 pagesPhysics LabJumar CadondonNo ratings yet
- Tabletop Simulator Script ObjectDocument10 pagesTabletop Simulator Script ObjectMichael MelloNo ratings yet
- Development of AtomDocument32 pagesDevelopment of AtomRazel PanuncialNo ratings yet