You might also like
- Beikmann JVA 1996Document8 pagesBeikmann JVA 1996sahil.s237192101No ratings yet
- A Compact Rotary Series Elastic Actuator For HumanDocument11 pagesA Compact Rotary Series Elastic Actuator For HumanJhon Michel Diaz LozanoNo ratings yet
- Experimental Study On The Unsteady Performance of The Multistage Centrifugal PumpDocument10 pagesExperimental Study On The Unsteady Performance of The Multistage Centrifugal PumpKelvin IbrahimNo ratings yet
- 1 s2.0 S0888327022005337 MainDocument21 pages1 s2.0 S0888327022005337 MainjaychengNo ratings yet
- In-Situ Single Plane Balancing in Vertical Circulating Water Pump-Motor SystemDocument8 pagesIn-Situ Single Plane Balancing in Vertical Circulating Water Pump-Motor SystemIpsitaNo ratings yet
- Finite Element Analysis For Structural Modification and Control Resonance of A Vertical Pump.Document13 pagesFinite Element Analysis For Structural Modification and Control Resonance of A Vertical Pump.dalia elgazzarNo ratings yet
- 2 III March 2014Document9 pages2 III March 2014Yeamlak SisayNo ratings yet
- Experimental Investigation of Dynamics Effects On Multiple-Injection Common Rail System PerformanceDocument13 pagesExperimental Investigation of Dynamics Effects On Multiple-Injection Common Rail System PerformancemoaedNo ratings yet
- DissertationDocument52 pagesDissertationHuy Nguyễn Ngọc QuangNo ratings yet
- Vibration Analysis On Centrifugal Pumpbelt Clutchconnection System Insidethe Belt of 7,5 MM Thick, 145 MM WideDocument6 pagesVibration Analysis On Centrifugal Pumpbelt Clutchconnection System Insidethe Belt of 7,5 MM Thick, 145 MM Widenorvan aji satrioNo ratings yet
- 2010-Fan C.C-Fluid ind Inst elim of Rot-b sys with EM exciter-Intl JMSDocument9 pages2010-Fan C.C-Fluid ind Inst elim of Rot-b sys with EM exciter-Intl JMSAlex CooperNo ratings yet
- Multistage Horizontal Boiler Feed Pumps - Rotor Dynamic and Structural Advantages of The Opposite Versus Equidirectional Impellers ConfigurationDocument9 pagesMultistage Horizontal Boiler Feed Pumps - Rotor Dynamic and Structural Advantages of The Opposite Versus Equidirectional Impellers ConfigurationJozsef MagyariNo ratings yet
- Dynamic Data Analysis of Compressor Rotating StallDocument12 pagesDynamic Data Analysis of Compressor Rotating Stalljessika woodNo ratings yet
- Jmse 10 01173 v2Document16 pagesJmse 10 01173 v2Dina ANDRIAMAHEFAHERYNo ratings yet
- Pump Isolation PaperDocument22 pagesPump Isolation PaperRoozbeh PNo ratings yet
- Damping HoleDocument11 pagesDamping HoleMurali K oe16d017No ratings yet
- Rotordynamic Capabilities in ANSYS Mechanical PDFDocument3 pagesRotordynamic Capabilities in ANSYS Mechanical PDFFarzad SadrNo ratings yet
- Torsional VibrationDocument4 pagesTorsional Vibrationmartin.rubenNo ratings yet
- Active Control of Flow Structure and Unsteady Aerodynamic Force of Box Girder With Leading-Edge Suction and Trailing-Edge JetDocument1 pageActive Control of Flow Structure and Unsteady Aerodynamic Force of Box Girder With Leading-Edge Suction and Trailing-Edge Jetcgb2020hit1No ratings yet
- Zhao 2013Document9 pagesZhao 2013haris shehzadNo ratings yet
- Torsional Vibration Analysis of Reciprocating Compressor Trains Driven B...Document11 pagesTorsional Vibration Analysis of Reciprocating Compressor Trains Driven B...fuzhi2016No ratings yet
- 07 TT 05 Seismic ABB PDFDocument3 pages07 TT 05 Seismic ABB PDFAhsanNo ratings yet
- Vibration in Large Process ColumnDocument2 pagesVibration in Large Process ColumnHieuNo ratings yet
- AA V1 I2 Rotor Dynamic CapabilitiesDocument3 pagesAA V1 I2 Rotor Dynamic CapabilitiesmhtofighiNo ratings yet
- Dolmatov 2016 IOP Conf. Ser. Earth Environ. Sci. 49 072009Document10 pagesDolmatov 2016 IOP Conf. Ser. Earth Environ. Sci. 49 072009Manel MontesinosNo ratings yet
- Choose Between Long-Stroke Sucker Rod Pumping Systems.: September 2015Document5 pagesChoose Between Long-Stroke Sucker Rod Pumping Systems.: September 2015Mohanad HussienNo ratings yet
- Study of Pressure Fluctuations and Induced Vibration at Blade-Passing Frequencies of A Double Volute PumpDocument13 pagesStudy of Pressure Fluctuations and Induced Vibration at Blade-Passing Frequencies of A Double Volute Pumpmortazavi.technicalNo ratings yet
- 12 Nilaykumar PatelDocument7 pages12 Nilaykumar Patelmohammed dawNo ratings yet
- 3d 프린팅을 이용한 장갑전투도저 원심펌프 임펠러의 성능 개선 연구Document8 pages3d 프린팅을 이용한 장갑전투도저 원심펌프 임펠러의 성능 개선 연구cjsehf12No ratings yet
- Abstract: Crude Oil Transport Is An Essential Task in OilDocument4 pagesAbstract: Crude Oil Transport Is An Essential Task in OilJetalNo ratings yet
- Jautoeng Online Paper Fluid Damping 2018Document10 pagesJautoeng Online Paper Fluid Damping 2018Luis LacomaNo ratings yet
- Experimental Investigation of Characteristics ofDocument16 pagesExperimental Investigation of Characteristics ofShivani SNo ratings yet
- Deng 2018 IOP Conf. Ser. Mater. Sci. Eng. 452 022085Document10 pagesDeng 2018 IOP Conf. Ser. Mater. Sci. Eng. 452 022085Rahul BarahateNo ratings yet
- Mathematical Modeling of Axial Oscillation Tools in High-Angle WellsDocument11 pagesMathematical Modeling of Axial Oscillation Tools in High-Angle WellsSparrow Passer RutilansNo ratings yet
- 4.cao Et Al. - 2016 - Duty Cycle Effect On Jet Control Based On A Single Unsteady Minijet (2) - AnnotatedDocument5 pages4.cao Et Al. - 2016 - Duty Cycle Effect On Jet Control Based On A Single Unsteady Minijet (2) - Annotatedjinuchandran09No ratings yet
- Design and Control of A Directly-Driven Bond Head For Thermosonic BondingDocument11 pagesDesign and Control of A Directly-Driven Bond Head For Thermosonic BondingRockerss RockerssNo ratings yet
- Fluid-Structure Analysis of Stress and Deformation in an Axial-Flow Pump ImpellerDocument11 pagesFluid-Structure Analysis of Stress and Deformation in an Axial-Flow Pump ImpellerPhượng NguyễnNo ratings yet
- Hydraulic Machine VibrationDocument7 pagesHydraulic Machine VibrationMigadde DanielNo ratings yet
- Motion and Stress Analysis of Cam System For Marine Diesel Engine 93 KWDocument3 pagesMotion and Stress Analysis of Cam System For Marine Diesel Engine 93 KWSwan Htet AungNo ratings yet
- Vibration Analysis of Electric AutoDocument11 pagesVibration Analysis of Electric AutoAzinoNo ratings yet
- Vibrationanalysisof PeltonDocument6 pagesVibrationanalysisof PeltonAditya DoyaleNo ratings yet
- Amesim-Piston Pump ModelDocument5 pagesAmesim-Piston Pump ModelanuarmNo ratings yet
- Choose Between Current Long-Stroke Sucker Rod Pumping SystemsDocument4 pagesChoose Between Current Long-Stroke Sucker Rod Pumping SystemsNevada Saga SusenoNo ratings yet
- Dynamic Analysis and Balancing of An 1150 MW Turbine-Generator SystemDocument10 pagesDynamic Analysis and Balancing of An 1150 MW Turbine-Generator SystemThanhluan NguyenNo ratings yet
- Vibration Analysis in Reciprocating CompressorsDocument11 pagesVibration Analysis in Reciprocating Compressorsakamalapuri388No ratings yet
- Marine Diesel Engine Cam System AnalysisDocument6 pagesMarine Diesel Engine Cam System AnalysissudeeraNo ratings yet
- Experimental and Theoretical Study of A Vane Pass Frequency For A Centrifugal PumpDocument13 pagesExperimental and Theoretical Study of A Vane Pass Frequency For A Centrifugal PumpDamigo DiegoNo ratings yet
- Pulsation Suppression Device Design For Reciprocating CompressorDocument9 pagesPulsation Suppression Device Design For Reciprocating CompressorAlfred LamNo ratings yet
- Simulation and Experimental Analysis of Pressure Pulsation Characteristics of Pump Source FluidDocument17 pagesSimulation and Experimental Analysis of Pressure Pulsation Characteristics of Pump Source FluidFrancesca CoattiNo ratings yet
- Pump Vibration AnalysisDocument13 pagesPump Vibration AnalysisRABIU M RABIUNo ratings yet
- Stability Performance For Primary Frequency Regulation - 2018 - Applied MathemaDocument21 pagesStability Performance For Primary Frequency Regulation - 2018 - Applied Mathemarotimi olalekan fataiNo ratings yet
- Sohn - 00 - Semi-Active Control of The Macpherson Suspension System HILDocument6 pagesSohn - 00 - Semi-Active Control of The Macpherson Suspension System HILjjlozoyaNo ratings yet
- 1 s2.0 S1000936123000912 MainDocument21 pages1 s2.0 S1000936123000912 MainpachterNo ratings yet
- Subsynchronous Resonance Analysis IEEE First Benchmark ModelDocument4 pagesSubsynchronous Resonance Analysis IEEE First Benchmark ModelBhavik PrajapatiNo ratings yet
- Significance of Vibration Diagnosis of Rotating Machines During Commissioning: Few Case StudiesDocument15 pagesSignificance of Vibration Diagnosis of Rotating Machines During Commissioning: Few Case StudiesosamaelnahrawyNo ratings yet
- Condition Monitoring of Rope-Less Elevator Braking System Based On Wavelet DenoisingDocument8 pagesCondition Monitoring of Rope-Less Elevator Braking System Based On Wavelet DenoisingKIRUBEL MENBERUNo ratings yet
- Fluid-Hammer Induced Pressure Oscillations in A Cryogenic Feed Line-Joseph Et Al 2017Document11 pagesFluid-Hammer Induced Pressure Oscillations in A Cryogenic Feed Line-Joseph Et Al 2017napoleonmNo ratings yet
- Energetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationFrom EverandEnergetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationNo ratings yet
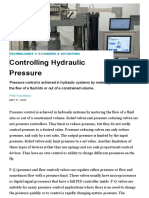
- Controlling Hydraulic PressureDocument6 pagesControlling Hydraulic Pressureback1949100% (1)
- How Natural Frequency Limits Frequency of Acceleration - Hydraulics & PneumaticsDocument7 pagesHow Natural Frequency Limits Frequency of Acceleration - Hydraulics & Pneumaticsback1949No ratings yet
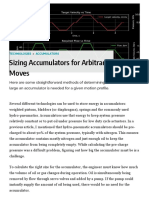
- Sizing Accumulators For Arbitrary Moves - Hydraulics & PneumaticsDocument5 pagesSizing Accumulators For Arbitrary Moves - Hydraulics & Pneumaticsback1949100% (1)
- EibfiweubfDocument19 pagesEibfiweubfNagesh DewanganNo ratings yet
- B A C D: Quickstart BasicDocument2 pagesB A C D: Quickstart Basicback1949No ratings yet
- Quickstart basic digital proportionals analog commandDocument2 pagesQuickstart basic digital proportionals analog commandback1949No ratings yet
- Compatibility For EMC, Climate and Mechanical LoadDocument4 pagesCompatibility For EMC, Climate and Mechanical Loadback1949No ratings yet
- EibfiweubfDocument19 pagesEibfiweubfNagesh DewanganNo ratings yet
- OPC UA TSN - A New Solution For Industrial CommunicationDocument10 pagesOPC UA TSN - A New Solution For Industrial Communicationback1949No ratings yet
- 智能科技改变机床生产格局Document39 pages智能科技改变机床生产格局back1949No ratings yet
- Electronification of Open Loop HydraulicsDocument39 pagesElectronification of Open Loop Hydraulicsback1949100% (2)
- Nasa 2010 Iest MVFDocument29 pagesNasa 2010 Iest MVFback1949No ratings yet
- CasappaDocument44 pagesCasappaback1949No ratings yet
- ACOPOS P3配置解析及配置案例V0.00Document16 pagesACOPOS P3配置解析及配置案例V0.00back1949No ratings yet
- Load-Force-Adaptive Outlet Throttling - An Easily CommissionableDocument13 pagesLoad-Force-Adaptive Outlet Throttling - An Easily Commissionableback1949No ratings yet
- US7322375Document13 pagesUS7322375back1949No ratings yet
- QB300Document2 pagesQB300back1949No ratings yet
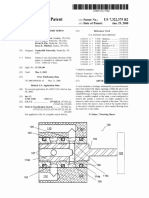
- United States Patent (10) Patent No.: US 6,367,365 B1: Weickert Et Al. (45) Date of Patent: Apr. 9, 2002Document10 pagesUnited States Patent (10) Patent No.: US 6,367,365 B1: Weickert Et Al. (45) Date of Patent: Apr. 9, 2002back1949No ratings yet
- Moog ServoValves Techn Look Overview enDocument36 pagesMoog ServoValves Techn Look Overview enGonzalo Gutierrez100% (1)
- Digital Hydraulic Valves Gaining Momentum: Newton, Ma-The Trend Toward De-Centralized Control On The Factory FloorDocument2 pagesDigital Hydraulic Valves Gaining Momentum: Newton, Ma-The Trend Toward De-Centralized Control On The Factory Floorback1949100% (1)
- 高速机床跟随误差 PDFDocument7 pages高速机床跟随误差 PDFback1949No ratings yet
- User Manual: M3000 Automation System MSC II (Moog Servo Controller)Document148 pagesUser Manual: M3000 Automation System MSC II (Moog Servo Controller)back1949No ratings yet
- Fluid ContaminationDocument4 pagesFluid Contaminationback1949No ratings yet
- Yuken Newprodguide JC-10010-1Document12 pagesYuken Newprodguide JC-10010-1back1949100% (1)
- Industrial Hydraulic ValvesCat HY14 2500 DCVPCVServoElect 12 11Document464 pagesIndustrial Hydraulic ValvesCat HY14 2500 DCVPCVServoElect 12 11back1949100% (1)
- 6 Costly Mistakes Most Hydraulics Users Make and How You Can Avoid Them!Document6 pages6 Costly Mistakes Most Hydraulics Users Make and How You Can Avoid Them!back1949No ratings yet
- Rexroth and Atos Valve CompareDocument7 pagesRexroth and Atos Valve Compareback1949No ratings yet
- F-35 Air Vehicle Technology Overview PDFDocument28 pagesF-35 Air Vehicle Technology Overview PDFback1949No ratings yet
- Servo Valves TechnicalDocument24 pagesServo Valves Technicalobvert100% (2)
- If Steam Drum Under Vacuum Then What Will HappenDocument2 pagesIf Steam Drum Under Vacuum Then What Will HappenyogacruiseNo ratings yet
- Prestige Bella VistaDocument27 pagesPrestige Bella VistaArun RajagopalNo ratings yet
- Challenges Faced by PET ConvertorDocument35 pagesChallenges Faced by PET ConvertorRakeshjha75No ratings yet
- Cam DynamicsDocument8 pagesCam DynamicsRitik PatelNo ratings yet
- Chapter 01 - JAVA ProgrammingDocument29 pagesChapter 01 - JAVA ProgrammingsunnyxmNo ratings yet
- Otis Relay Coils SpecificationsDocument1 pageOtis Relay Coils SpecificationsDamian Alberto EspositoNo ratings yet
- Attribute Achievement FormDocument14 pagesAttribute Achievement FormPablo Guzmán López0% (2)
- Vena SIF Piping CalculationDocument5 pagesVena SIF Piping CalculationPratap KollapaneniNo ratings yet
- Xbox 14260984 Ssc2802 TX 4 A DatasheetDocument5 pagesXbox 14260984 Ssc2802 TX 4 A DatasheetBaye Dame DIOPNo ratings yet
- The Autolisp TutorialsDocument285 pagesThe Autolisp Tutorialsmynareshk100% (7)
- SEP2 MeterViewDocument23 pagesSEP2 MeterViewmarcofffmota3196No ratings yet
- Line Follower NXTDocument21 pagesLine Follower NXTKen LeNo ratings yet
- Ec7 WallapDocument20 pagesEc7 WallapJack DoverNo ratings yet
- HandRail Specsgf For CfvdrfsDocument3 pagesHandRail Specsgf For CfvdrfsTarek TarekNo ratings yet
- Clements High School Celebrating 30 Years of Academic ExcellenceDocument22 pagesClements High School Celebrating 30 Years of Academic ExcellenceclementsrangersNo ratings yet
- ID-Operator Guide r2Document138 pagesID-Operator Guide r2Mahdi DehghankarNo ratings yet
- Stampingjournal20130102 DLDocument36 pagesStampingjournal20130102 DLWaqar MansoorNo ratings yet
- UCI274D - Technical Data SheetDocument8 pagesUCI274D - Technical Data SheetFloresNo ratings yet
- TG Tractor Repair Manual Book 5A - Table of Contents: Description Book Number Section Number NumberDocument200 pagesTG Tractor Repair Manual Book 5A - Table of Contents: Description Book Number Section Number NumberJózsef NagyNo ratings yet
- Gearbox Efficiency and LubricationDocument6 pagesGearbox Efficiency and Lubricationrashm006ranjanNo ratings yet
- STG SiemensDocument2 pagesSTG SiemensjoncperezNo ratings yet
- Technical Spec & BOQ Screw ConveyorDocument7 pagesTechnical Spec & BOQ Screw ConveyorjhsudhsdhwuNo ratings yet
- Aiwa NSX-VC58Document41 pagesAiwa NSX-VC580000AbdielNo ratings yet
- KIOTI tractor manual overviewDocument150 pagesKIOTI tractor manual overviewNatsumi KawaiNo ratings yet
- Catalogue 12V Ilss For Polis Bantuan Vehicles (Petronas)Document7 pagesCatalogue 12V Ilss For Polis Bantuan Vehicles (Petronas)Afiq Muizz SallehhoudinNo ratings yet
- Two-Way Floor SystemDocument11 pagesTwo-Way Floor SystemJason TanNo ratings yet
- User Manual Kxtda 30 600Document252 pagesUser Manual Kxtda 30 600kabeh1No ratings yet
- Daily Site Progress Report 43443status of - 409dd-Mmm-Yy Report # 00105Document8 pagesDaily Site Progress Report 43443status of - 409dd-Mmm-Yy Report # 00105nemalipalli007No ratings yet
- En 1555-4 (2002)Document15 pagesEn 1555-4 (2002)joaoferreiraprfNo ratings yet
- LATERAL EARTH PRESSURE CALCULATIONSDocument55 pagesLATERAL EARTH PRESSURE CALCULATIONSRakesh SheteNo ratings yet