You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Comparison of Spherical Joint Models in The Dynamic Analysis of Rigid Mechanical Systems - Ideal, Dry, Hydrodynamic and Bushing ApproachesDocument46 pagesComparison of Spherical Joint Models in The Dynamic Analysis of Rigid Mechanical Systems - Ideal, Dry, Hydrodynamic and Bushing ApproachesThaiHuynhNgocNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Static and Dynamic Simulation in The SeismicDocument8 pagesStatic and Dynamic Simulation in The SeismicIrfansetya BasithNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Thermal Enhancementof Pulley Belt Mechanismbyusing Finite Element AnalysisDocument10 pagesThermal Enhancementof Pulley Belt Mechanismbyusing Finite Element AnalysisThaiHuynhNgocNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Halicioglu 2014 J. Phys. Conf. Ser. 490 012053Document5 pagesHalicioglu 2014 J. Phys. Conf. Ser. 490 012053ThaiHuynhNgocNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Experimental Determination of Timing BelDocument6 pagesExperimental Determination of Timing BelThaiHuynhNgocNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- DynamicBehaviorAnalysisoftheSliderCrankLinkage PDFDocument19 pagesDynamicBehaviorAnalysisoftheSliderCrankLinkage PDFRachmat FirdausNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Vibro-Impact Response Analysis of Collision With Clearance - A TutorialDocument18 pagesVibro-Impact Response Analysis of Collision With Clearance - A TutorialThaiHuynhNgocNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- OptimizationDocument8 pagesOptimizationThaiHuynhNgocNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Thermal Analysis of Disc Brake Using ANSYS: June 2018Document11 pagesThermal Analysis of Disc Brake Using ANSYS: June 2018Rakesh ThurpatiNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Intelligent and Fuzzy Techniques: Smart and Innovative SolutionsDocument1,701 pagesIntelligent and Fuzzy Techniques: Smart and Innovative SolutionsThaiHuynhNgocNo ratings yet
- Camshaft PaperDocument5 pagesCamshaft PaperkotoyayNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- 1 s2.0 S2214785322015607 MainDocument6 pages1 s2.0 S2214785322015607 MainThaiHuynhNgocNo ratings yet
- Thermal Analysis of Disc Brake Using ANSYS: June 2018Document11 pagesThermal Analysis of Disc Brake Using ANSYS: June 2018Rakesh ThurpatiNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Design of Machinery (Download Tai Tailieutuoi - Com) PDFDocument10 pagesDesign of Machinery (Download Tai Tailieutuoi - Com) PDFThaiHuynhNgocNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- F-Test and Decomposition of DataDocument13 pagesF-Test and Decomposition of DataThaiHuynhNgocNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Intelligent and Fuzzy Techniques: Smart and Innovative SolutionsDocument1,701 pagesIntelligent and Fuzzy Techniques: Smart and Innovative SolutionsThaiHuynhNgocNo ratings yet
- Modeling and Analysis of Engagement Behavior of On PDFDocument11 pagesModeling and Analysis of Engagement Behavior of On PDFThaiHuynhNgocNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Dynamic Analyses of A Clutch of Crank Press PDFDocument17 pagesDynamic Analyses of A Clutch of Crank Press PDFThaiHuynhNgocNo ratings yet
- Orthogonal Arrays: How To Use?Document12 pagesOrthogonal Arrays: How To Use?ThaiHuynhNgocNo ratings yet
- Analysis of Factors Affecting Vibration During Wet PDFDocument10 pagesAnalysis of Factors Affecting Vibration During Wet PDFThaiHuynhNgocNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Research Article: Driveline Torsional Analysis and Clutch Damper Optimization For Reducing Gear RattleDocument25 pagesResearch Article: Driveline Torsional Analysis and Clutch Damper Optimization For Reducing Gear RattleLindsay Shantha RubiaNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Analysis of VarianceDocument14 pagesAnalysis of VarianceThaiHuynhNgocNo ratings yet
- 464-Article Text-792-1-10-20200921Document14 pages464-Article Text-792-1-10-20200921ThaiHuynhNgocNo ratings yet
- Orthogonal Arrays: How To Construct?Document17 pagesOrthogonal Arrays: How To Construct?ThaiHuynhNgocNo ratings yet
- Robotics ToolboxDocument81 pagesRobotics ToolboxfiveauoneNo ratings yet
- Earl Cox - The Fuzzy Systems Handbook - A Practitioner's Guide To Building, Using, and Maintaining Fuzzy Systems-Ap Professional (1994) PDFDocument672 pagesEarl Cox - The Fuzzy Systems Handbook - A Practitioner's Guide To Building, Using, and Maintaining Fuzzy Systems-Ap Professional (1994) PDFThaiHuynhNgocNo ratings yet
- Computer Aided Analysis and Optimization of Mechanical System DynamicsDocument706 pagesComputer Aided Analysis and Optimization of Mechanical System DynamicsValencia Luis ErnestoNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Compliant MechanismsDocument21 pagesCompliant MechanismsThaiHuynhNgocNo ratings yet
- (Studies in Fuzziness and Soft Computing) Zhong Li - Fuzzy Chaotic Systems - Modeling, Control, and Applications-Springer (2006) PDFDocument299 pages(Studies in Fuzziness and Soft Computing) Zhong Li - Fuzzy Chaotic Systems - Modeling, Control, and Applications-Springer (2006) PDFThaiHuynhNgocNo ratings yet
- EssentialMechanics V1 Final 3Document867 pagesEssentialMechanics V1 Final 3ThaiHuynhNgoc100% (1)
- PIO APPL RegistrationDocument113 pagesPIO APPL RegistrationksamyNo ratings yet
- Joost Network ArchitectureDocument29 pagesJoost Network Architecturegholkr100% (2)
- Api 650Document12 pagesApi 650Efrain TiradoNo ratings yet
- TEMPCORE® Process To Produce Low-Cost High Strength RebarsDocument7 pagesTEMPCORE® Process To Produce Low-Cost High Strength Rebarsamber sareenNo ratings yet
- HRM 3703 Exam Prep ALL Chapters - CarolineDocument60 pagesHRM 3703 Exam Prep ALL Chapters - CarolineTessa Mkhomole100% (3)
- Phy212 CH14 Worksheet-W07-KeyDocument5 pagesPhy212 CH14 Worksheet-W07-Keyangelyn tiongcoNo ratings yet
- User'S Manual: Portable High Current Test Set Model Number Hc1Document17 pagesUser'S Manual: Portable High Current Test Set Model Number Hc1Victor Jose Romero FernandezNo ratings yet
- How To Install AutoCAD 2010 Without ErrorsDocument2 pagesHow To Install AutoCAD 2010 Without ErrorsmaicoNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- GreenBiz Baseline Survey 2023Document6 pagesGreenBiz Baseline Survey 2023Maina KanyottuNo ratings yet
- KEI - Cable List Price - April 2021Document5 pagesKEI - Cable List Price - April 2021smithNo ratings yet
- 09 - Erosion Mechanisms Which Cause Boiler Tube FailureDocument40 pages09 - Erosion Mechanisms Which Cause Boiler Tube Failuremahati munnaNo ratings yet
- It Law Question and AnswersDocument2 pagesIt Law Question and AnswersJb SadikNo ratings yet
- CHAPTER - 1 - MapReduceDocument27 pagesCHAPTER - 1 - MapReduceDhana Lakshmi BoomathiNo ratings yet
- Internet of Things For Smart ManufacturingDocument3 pagesInternet of Things For Smart ManufacturingPK KNo ratings yet
- ESA-ESTL-TM-0065 01 - New Cage Designs - Ball Riding CagesDocument44 pagesESA-ESTL-TM-0065 01 - New Cage Designs - Ball Riding CagesAnonymous lEX5U51wOANo ratings yet
- INSITE 8.1.4 Release NotesDocument10 pagesINSITE 8.1.4 Release NotesTocxoan TocxoanNo ratings yet
- Unit 9 - Lesson D: Identity Theft: Touchstone 2nd Edition - Language Summary - Level 3Document2 pagesUnit 9 - Lesson D: Identity Theft: Touchstone 2nd Edition - Language Summary - Level 3Janeth GuerreroNo ratings yet
- Introduction To Linear Algebra 6th Edition and A CR - 05Document14 pagesIntroduction To Linear Algebra 6th Edition and A CR - 05maviarena44% (9)
- Brochure For Structure 2021Document2 pagesBrochure For Structure 2021Miguel WindsorNo ratings yet
- Sewage Air ValveDocument10 pagesSewage Air ValveAhmed TalaatNo ratings yet
- En - Subject c00Document15 pagesEn - Subject c00Carla CaramNo ratings yet
- Sizing & Costing - HEX& Storage TanksDocument26 pagesSizing & Costing - HEX& Storage TanksNg Kai EnNo ratings yet
- Algebraic Combinatorics: Richard P. StanleyDocument268 pagesAlgebraic Combinatorics: Richard P. Stanleypark miruNo ratings yet
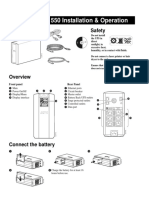
- Back-UPS RS 550 Installation & Operation: Inventory SafetyDocument7 pagesBack-UPS RS 550 Installation & Operation: Inventory SafetyAndrej VukalovicNo ratings yet
- WinilabDocument399 pagesWinilabManuja DamithNo ratings yet
- Outlook Folder Appears Empty Even Though There Are Emails in ItDocument4 pagesOutlook Folder Appears Empty Even Though There Are Emails in ItMartin GreenNo ratings yet
- Nagaraj CH Professional SummaryDocument7 pagesNagaraj CH Professional SummaryrecruiterkkNo ratings yet
- ManualDocument12 pagesManualAnderson DePaulaNo ratings yet
- Chatbots: Bank of AmericaDocument8 pagesChatbots: Bank of AmericarohinNo ratings yet
- Masterseal 901: Vinyl Ester Methacrylate Resin For Crack Injection Via Injection Hoses and PackersDocument2 pagesMasterseal 901: Vinyl Ester Methacrylate Resin For Crack Injection Via Injection Hoses and PackersMadhu RaiNo ratings yet
- Hero Found: The Greatest POW Escape of the Vietnam WarFrom EverandHero Found: The Greatest POW Escape of the Vietnam WarRating: 4 out of 5 stars4/5 (19)
- The Fabric of Civilization: How Textiles Made the WorldFrom EverandThe Fabric of Civilization: How Textiles Made the WorldRating: 4.5 out of 5 stars4.5/5 (58)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestFrom EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestRating: 4 out of 5 stars4/5 (28)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaFrom EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNo ratings yet
- The End of Craving: Recovering the Lost Wisdom of Eating WellFrom EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellRating: 4.5 out of 5 stars4.5/5 (81)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Sully: The Untold Story Behind the Miracle on the HudsonFrom EverandSully: The Untold Story Behind the Miracle on the HudsonRating: 4 out of 5 stars4/5 (103)
- Pale Blue Dot: A Vision of the Human Future in SpaceFrom EverandPale Blue Dot: A Vision of the Human Future in SpaceRating: 4.5 out of 5 stars4.5/5 (588)