You might also like
- Nonlinear Model Predictive Control For Autonomous Race CarsDocument29 pagesNonlinear Model Predictive Control For Autonomous Race CarsBehzad SamadiNo ratings yet
- Real-Time Estimation of Vehicle State and Tire-Road Friction ForcesDocument7 pagesReal-Time Estimation of Vehicle State and Tire-Road Friction ForcesBehzad SamadiNo ratings yet
- Linear Control Systems CourseDocument2 pagesLinear Control Systems CourseBehzad SamadiNo ratings yet
- Convex Optimization and ApplicationsDocument3 pagesConvex Optimization and ApplicationsBehzad SamadiNo ratings yet
- Industrial Control Systems - 05 AutomotiveDocument87 pagesIndustrial Control Systems - 05 AutomotiveBehzad SamadiNo ratings yet
- Lead Lag Controller DesignDocument10 pagesLead Lag Controller DesignBehzad SamadiNo ratings yet
- Industrial Control Systems - 09 PIDDocument242 pagesIndustrial Control Systems - 09 PIDBehzad SamadiNo ratings yet
- 10SSDocument111 pages10SSRaju SkNo ratings yet
- Industrial Control Systems - 03 PneumaticsDocument30 pagesIndustrial Control Systems - 03 PneumaticsBehzad SamadiNo ratings yet
- PLC 130701140253 Phpapp01Document179 pagesPLC 130701140253 Phpapp01luispereira89No ratings yet
- Industrial Control Systems - 08 Chemical SystemsDocument18 pagesIndustrial Control Systems - 08 Chemical SystemsBehzad SamadiNo ratings yet
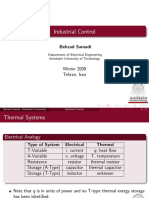
- Industrial Control Systems - 07 Thermal SystemsDocument11 pagesIndustrial Control Systems - 07 Thermal SystemsBehzad SamadiNo ratings yet
- 02modeling 130701130803 Phpapp01Document6 pages02modeling 130701130803 Phpapp01luispereira89No ratings yet
- Matlab TutorialDocument47 pagesMatlab TutorialBehzad SamadiNo ratings yet
- Industrial Control Systems - 06 Liquid LevelDocument10 pagesIndustrial Control Systems - 06 Liquid LevelBehzad SamadiNo ratings yet
- Industrial Control Systems - 01 IntroductionDocument5 pagesIndustrial Control Systems - 01 IntroductionBehzad SamadiNo ratings yet
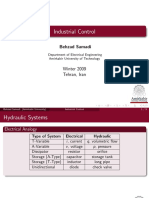
- Industrial Control Systems - 04 HydraulicsDocument18 pagesIndustrial Control Systems - 04 HydraulicsBehzad SamadiNo ratings yet
- The Tragedy of 1953Document5 pagesThe Tragedy of 1953Behzad SamadiNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Jawaban Pertanyaan Forum B.Inggris Simple Present Dan Present ContinuousDocument3 pagesJawaban Pertanyaan Forum B.Inggris Simple Present Dan Present ContinuousTirza NaomiNo ratings yet
- HdfcLogs 20 June 23Document13 pagesHdfcLogs 20 June 23MD RAHEMANNo ratings yet
- Lecture 1 RoboticsDocument34 pagesLecture 1 RoboticsArshadNo ratings yet
- Options Recommendation Briefing NoteDocument2 pagesOptions Recommendation Briefing NoteAnonymous Esp4JONo ratings yet
- Tribhuvan University Faculty of Humanities and Social Sciences A Project Proposal On "Student Management System"Document2 pagesTribhuvan University Faculty of Humanities and Social Sciences A Project Proposal On "Student Management System"Jitendra chaudharyNo ratings yet
- DSE7410-MKII-DSE7420-MKII ManualDocument2 pagesDSE7410-MKII-DSE7420-MKII ManualCarlo JasminNo ratings yet
- EE Lab Manuls Fast NuDocument70 pagesEE Lab Manuls Fast NuMuhammad SaadNo ratings yet
- 15Document8 pages15Haseeb WaheedNo ratings yet
- SF EC Position Management enDocument154 pagesSF EC Position Management enAli Husain IbrahimNo ratings yet
- UntitledDocument2 pagesUntitledMohammad Asif ZakriyyaNo ratings yet
- Doosan DMS3.pdf CodesDocument2 pagesDoosan DMS3.pdf CodesHelder BarrosNo ratings yet
- All About FTP Must ReadDocument7 pagesAll About FTP Must ReadPINOY EUTSECNo ratings yet
- W568R Datasheet PDFDocument2 pagesW568R Datasheet PDFIrvin Yair Sabillón LópezNo ratings yet
- Htd5580 94 Pss AeninDocument3 pagesHtd5580 94 Pss AeninpacificNo ratings yet
- Recurrent Neural Networks: Anahita Zarei, PH.DDocument37 pagesRecurrent Neural Networks: Anahita Zarei, PH.DNickNo ratings yet
- ChE462 Course Syllabus Spring1718Document2 pagesChE462 Course Syllabus Spring1718ozoNo ratings yet
- Frequently Asked Questions For LTE Post-Paid Data Plans March 2022Document6 pagesFrequently Asked Questions For LTE Post-Paid Data Plans March 2022dlaminiz912No ratings yet
- SDS2 7.1-Assorted Tools PDFDocument94 pagesSDS2 7.1-Assorted Tools PDFwayne6088No ratings yet
- Activity: 1. Positive and Negative NumbersDocument14 pagesActivity: 1. Positive and Negative NumbersIrene Arbos DalmauNo ratings yet
- Wang Guangbin Et Al - Exploring The High-Efficiency Clash Detection (... ) (2011, Paper)Document7 pagesWang Guangbin Et Al - Exploring The High-Efficiency Clash Detection (... ) (2011, Paper)Roger KriegerNo ratings yet
- AC1300 Mu-Mimo Wi-Fi RouterDocument7 pagesAC1300 Mu-Mimo Wi-Fi Routerlamvan tuNo ratings yet
- Internet of Things IoT Based Healthcare Monitoring System Using NodeMCU and Arduino UNODocument5 pagesInternet of Things IoT Based Healthcare Monitoring System Using NodeMCU and Arduino UNOEditor IJTSRD100% (1)
- Ait Unit 3Document10 pagesAit Unit 3Ayushi PatelNo ratings yet
- AEEP2211 Lab 6Document29 pagesAEEP2211 Lab 660103041No ratings yet
- BD PocDocument2 pagesBD PocngocthelongNo ratings yet
- Sunde: User's Manual For H4 and Earlier ModelsDocument78 pagesSunde: User's Manual For H4 and Earlier ModelsMhegie GaylanNo ratings yet
- Introduction To Direct Digital Control Systems: Purpose of This GuideDocument82 pagesIntroduction To Direct Digital Control Systems: Purpose of This GuidekdpmansiNo ratings yet
- Curriculum Vitae: Executive Summary & Covering LetterDocument9 pagesCurriculum Vitae: Executive Summary & Covering LetterKhalid MahmoodNo ratings yet
- Kopijahe (SFILEDocument2 pagesKopijahe (SFILEAde NurkamalNo ratings yet
- An Exploration On Artificial Intelligence Application: From Security, Privacy and Ethic PerspectiveDocument5 pagesAn Exploration On Artificial Intelligence Application: From Security, Privacy and Ethic PerspectiveDavid SilveraNo ratings yet