You might also like
- Ei6801 - Computer Control of Process Part-A Answer All Questions (5x2 10)Document7 pagesEi6801 - Computer Control of Process Part-A Answer All Questions (5x2 10)Anonymous yO7rcec6vuNo ratings yet
- Multivariable Control SystemDocument39 pagesMultivariable Control SystemAmeerRashidNo ratings yet
- Multivariable Control SystemDocument39 pagesMultivariable Control SystemFatin FatehaNo ratings yet
- Control of Multiple-Input, Multiple-Output ProcessesDocument38 pagesControl of Multiple-Input, Multiple-Output ProcessesdhineshpNo ratings yet
- ProcessDocument38 pagesProcessVaidh Prakash ChoudharyNo ratings yet
- Control of Multiple-Input, Multiple-Output ProcessesDocument38 pagesControl of Multiple-Input, Multiple-Output ProcessespraveenmandeNo ratings yet
- Control of Multiple-Input, Multiple-Output ProcessesDocument27 pagesControl of Multiple-Input, Multiple-Output Processesmeseret sisayNo ratings yet
- Chapter 18Document31 pagesChapter 18Mahmoud ElsisiNo ratings yet
- Control of Multiple-Input, Multiple-Output (MIMO) ProcessesDocument38 pagesControl of Multiple-Input, Multiple-Output (MIMO) Processessalvador2meNo ratings yet
- Multiloop and Multivariable Control PDFDocument43 pagesMultiloop and Multivariable Control PDFVaibhav AhujaNo ratings yet
- Chapter - 3 MKK1263 NH STDDocument36 pagesChapter - 3 MKK1263 NH STDBhinitha ChandrasagaranNo ratings yet
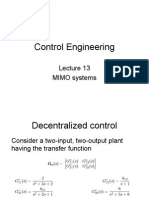
- Control Engineering: MIMO SystemsDocument26 pagesControl Engineering: MIMO SystemsPisicuta LaviniaNo ratings yet
- Stability and Plant WideDocument150 pagesStability and Plant WideAlifDzakiNo ratings yet
- Mathematical Modeling Part5Document32 pagesMathematical Modeling Part5Bharatula Suryamani Shankar ee19b013No ratings yet
- Closed Loop Control SystemDocument18 pagesClosed Loop Control Systemkalyan mondalNo ratings yet
- Automatic Control Systems TheoryDocument9 pagesAutomatic Control Systems TheoryJames KabugoNo ratings yet
- Block Diagram Algebra PDFDocument29 pagesBlock Diagram Algebra PDFAman SinghNo ratings yet
- FY Eng PDFDocument36 pagesFY Eng PDFCarraan Dandeettirra Caala AltakkatakkaNo ratings yet
- Group-1: Multivariable Control ProcessDocument24 pagesGroup-1: Multivariable Control ProcessSamuel AdamuNo ratings yet
- Example (1) : The Interaction of Control Loops in A Stirred Tank HeaterDocument30 pagesExample (1) : The Interaction of Control Loops in A Stirred Tank HeaterCupa no DensetsuNo ratings yet
- CHAPTER 3 Gas Absorption Lec-4Document25 pagesCHAPTER 3 Gas Absorption Lec-4Sata AjjamNo ratings yet
- ANNALS of Faculty Engineering HunedoaraDocument4 pagesANNALS of Faculty Engineering HunedoaraRonny A. ChavezNo ratings yet
- Compute Torque ControlDocument12 pagesCompute Torque ControlnhozcaibangNo ratings yet
- Topological Characterization of Quantum Phase Transitions in A S 1/2 Spin ModelDocument5 pagesTopological Characterization of Quantum Phase Transitions in A S 1/2 Spin ModelmimoraydenNo ratings yet
- Closed-Loop DynamicsDocument20 pagesClosed-Loop Dynamicsjunhao_tan_1100% (1)
- Assignment 8 2020 SolutionDocument2 pagesAssignment 8 2020 SolutionAmal GSNo ratings yet
- CHAPTER 3 Gas Absorption Lec-4Document25 pagesCHAPTER 3 Gas Absorption Lec-4Sata AjjamNo ratings yet
- Controller Design For Processes With Difficult DynamicsDocument24 pagesController Design For Processes With Difficult DynamicsMuhammed AfnazNo ratings yet
- Chapter 11 Chang.1Document34 pagesChapter 11 Chang.1satya sagarNo ratings yet
- Chapter 11Document61 pagesChapter 11AimiKhanNo ratings yet
- Work Energy Rigid Bodies 1Document7 pagesWork Energy Rigid Bodies 1Mark Angelo CarganillaNo ratings yet
- Block Diagram and The Closed-Loop Response: P D M C FDocument7 pagesBlock Diagram and The Closed-Loop Response: P D M C Fd_k_ÜNo ratings yet
- Decoupling Control Schemes of Multivariable Systems (多变量系统的解耦控制)Document32 pagesDecoupling Control Schemes of Multivariable Systems (多变量系统的解耦控制)Waqas KianiNo ratings yet
- Multivariable Control For MIMO ProcessesDocument14 pagesMultivariable Control For MIMO ProcessesJuanNo ratings yet
- Multivariable Chapter2Document42 pagesMultivariable Chapter2FASIH UR RAHMANNo ratings yet
- 2011-05 Sisomimo Design ExamplesDocument14 pages2011-05 Sisomimo Design ExamplesArundhati ChaudhariNo ratings yet
- EffectsDocument6 pagesEffectsAbhayNo ratings yet
- Worksheet 10Document3 pagesWorksheet 10rahmat qambariNo ratings yet
- EC - CE10 - Control Systems (2) : Test SummaryDocument18 pagesEC - CE10 - Control Systems (2) : Test Summarysaravanababu jayapalNo ratings yet
- Chapter 11Document46 pagesChapter 11ninoska217608No ratings yet
- A Robustly Stable Output Feedback Saturated Controller For The BDocument6 pagesA Robustly Stable Output Feedback Saturated Controller For The BAMIR SOHAILNo ratings yet
- t7 PDFDocument13 pagest7 PDFKj_bdNo ratings yet
- Interaction in Two-Variable Control Distillation Columns - IDocument14 pagesInteraction in Two-Variable Control Distillation Columns - IVardhan KaushikNo ratings yet
- The Blend Station A New Ratio Control StructureDocument6 pagesThe Blend Station A New Ratio Control StructureBOMBE45No ratings yet
- Controller Tuning: CHME 624 Advance Process Dynamic Modelling & ControlDocument15 pagesController Tuning: CHME 624 Advance Process Dynamic Modelling & Controlali aljifriNo ratings yet
- Answers and SolutionsDocument218 pagesAnswers and SolutionsGabriel AlvesNo ratings yet
- Lagrangian Modeling of DC-DC Buck-Boost and Flyback ConvertersDocument4 pagesLagrangian Modeling of DC-DC Buck-Boost and Flyback ConvertershalpaslanNo ratings yet
- Modelling of LQR Control With Matlab: 1 Model of The Mechanical SystemDocument7 pagesModelling of LQR Control With Matlab: 1 Model of The Mechanical SystemMelina MaydNo ratings yet
- Ch11-Dynamic Behavior & Stability of Closed-Loop Control System.Document15 pagesCh11-Dynamic Behavior & Stability of Closed-Loop Control System.Mark GoodmoreNo ratings yet
- RgaDocument19 pagesRgaGesang Rakhmad UtomoNo ratings yet
- The Relative Gain For Non-Square Multivariable SystemsDocument15 pagesThe Relative Gain For Non-Square Multivariable SystemsrajNo ratings yet
- Chapter 6slideDocument72 pagesChapter 6slidehailegebreselassie24No ratings yet
- Control ActionDocument11 pagesControl ActionfaizNo ratings yet
- Block DiagramDocument17 pagesBlock DiagramSimran Jeet Singh MakenNo ratings yet
- Control Systems NotesDocument18 pagesControl Systems NotesBoyang QinNo ratings yet
- Week 4 Assignment 1 SolutionDocument10 pagesWeek 4 Assignment 1 Solutionkirankuma.jagtapNo ratings yet
- Seminar 9 PDFDocument1 pageSeminar 9 PDFRaya Najiba TroyeeNo ratings yet
- Chapter5 Part2Document19 pagesChapter5 Part2Grant HeilemanNo ratings yet
- Tables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiFrom EverandTables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiNo ratings yet
- PhasorDocument22 pagesPhasorAyyar KandasamyNo ratings yet
- SCHR Cohn Stability TestDocument11 pagesSCHR Cohn Stability TestAyyar KandasamyNo ratings yet
- EM UNIT V Part A AnswerDocument4 pagesEM UNIT V Part A AnswerAyyar KandasamyNo ratings yet
- Scanned by CamscannerDocument30 pagesScanned by CamscannerAyyar KandasamyNo ratings yet
- System Identification Basics System Identification IsDocument7 pagesSystem Identification Basics System Identification IsAyyar KandasamyNo ratings yet
- Unit - IV Electrolytic ProcessDocument17 pagesUnit - IV Electrolytic ProcessAyyar KandasamyNo ratings yet
- CCP Unit 1 PDFDocument8 pagesCCP Unit 1 PDFAyyar KandasamyNo ratings yet
- Control of DeaeratorDocument31 pagesControl of DeaeratorAyyar KandasamyNo ratings yet
- Ei6002 Power Plant Instrumentation Question BankDocument11 pagesEi6002 Power Plant Instrumentation Question BankAyyar Kandasamy100% (2)
- CCP Unit 1 PDFDocument8 pagesCCP Unit 1 PDFAyyar KandasamyNo ratings yet
- Turbine Speed MeasurementDocument26 pagesTurbine Speed MeasurementAyyar Kandasamy100% (4)
- Governing SystemDocument9 pagesGoverning SystemAyyar KandasamyNo ratings yet
- Power TransistorDocument14 pagesPower TransistorAyyar KandasamyNo ratings yet
- Power TransistorsDocument18 pagesPower TransistorsAyyar KandasamyNo ratings yet
- Five Element ControlDocument1 pageFive Element ControlAyyar KandasamyNo ratings yet
- CL7101-Control System Design PDFDocument22 pagesCL7101-Control System Design PDFAyyar KandasamyNo ratings yet
- Control System Design Question For Periodical TestDocument3 pagesControl System Design Question For Periodical TestAyyar KandasamyNo ratings yet
- EI6402 Electrical Machines SyllabusDocument1 pageEI6402 Electrical Machines SyllabusAyyar KandasamyNo ratings yet
- Kalman MitDocument8 pagesKalman Mitcybercube88No ratings yet
- Labview TutorialDocument349 pagesLabview TutorialArsla KhanNo ratings yet
- EI6402 Electrical Machines Question BankDocument19 pagesEI6402 Electrical Machines Question BankAyyar KandasamyNo ratings yet
- SYLLABUS EI6002 Power Plant InstrumentationDocument1 pageSYLLABUS EI6002 Power Plant InstrumentationAyyar Kandasamy100% (1)
- PX7203-Special Electrical MachinesDocument7 pagesPX7203-Special Electrical MachinesAyyar KandasamyNo ratings yet
- BLDC Controller DesignDocument11 pagesBLDC Controller DesignAyyar KandasamyNo ratings yet
- Dr.K.Ayyar ProfileDocument2 pagesDr.K.Ayyar ProfileAyyar KandasamyNo ratings yet
- DMMDocument8 pagesDMMAyyar Kandasamy100% (1)
- Mei QB 18.11.2015Document17 pagesMei QB 18.11.2015Ayyar KandasamyNo ratings yet
- EC2255-Solved Problems in Control Systems PDFDocument182 pagesEC2255-Solved Problems in Control Systems PDFmaheshbabu527100% (2)
- R&D Presentation EIEDocument36 pagesR&D Presentation EIEAyyar KandasamyNo ratings yet
- Control AutomaticoDocument6 pagesControl Automaticoelkin Castillo uruetaNo ratings yet
- MergedDocument34 pagesMergedmahamaniNo ratings yet
- CMCDocument34 pagesCMCtauqir123100% (2)
- Industrial Automation Engineers Interview QuestionsDocument5 pagesIndustrial Automation Engineers Interview QuestionsJêmš NavikNo ratings yet
- FBs Special Relay Register List ENDocument19 pagesFBs Special Relay Register List ENAmmar Al-KindyNo ratings yet
- I515-E1-3 3G3HV User ManualDocument204 pagesI515-E1-3 3G3HV User ManualTaras MykytyukNo ratings yet
- 4008a en PDFDocument45 pages4008a en PDFHamsuddin TeknikNo ratings yet
- Datasheet TTMi4NDocument2 pagesDatasheet TTMi4Nnio756No ratings yet
- Percept ApplicationDocument36 pagesPercept ApplicationSkyezine Via Kit FoxNo ratings yet
- Modular Modeling and Control For Autonomous Underwater Vehicle (Auv)Document104 pagesModular Modeling and Control For Autonomous Underwater Vehicle (Auv)Dayarnab BaidyaNo ratings yet
- Il Top 1831&1832 CN enDocument51 pagesIl Top 1831&1832 CN enزروقي موسيNo ratings yet
- Rowling J K HP01 Harry Potter Et La Pierre PhilosophaleDocument7 pagesRowling J K HP01 Harry Potter Et La Pierre PhilosophaleSf FgNo ratings yet
- Modern Control Systems 13th Edition Ebook PDFDocument42 pagesModern Control Systems 13th Edition Ebook PDFmary.kilberg283100% (35)
- Design and Comparison of Robust Nonlinear Controllers For The Lateral Dynamics of Intelligent Vehicles (Controlador Lateral e I&I)Document14 pagesDesign and Comparison of Robust Nonlinear Controllers For The Lateral Dynamics of Intelligent Vehicles (Controlador Lateral e I&I)Renan PortoNo ratings yet
- Adam-4022t Manual v2.2Document32 pagesAdam-4022t Manual v2.2Biplab DattaNo ratings yet
- Proxy Ryo StabilityDocument23 pagesProxy Ryo StabilityPablo CetysNo ratings yet
- Catalogo de ControlesDocument232 pagesCatalogo de ControlesWilliam Dante Mescco SaireNo ratings yet
- FY900 Temperature ControllerDocument9 pagesFY900 Temperature ControllerOlubunmi AdejugbeNo ratings yet
- Graphical System Design Guide To Power Electronics Co-Simulation With Multisim and LabviewDocument121 pagesGraphical System Design Guide To Power Electronics Co-Simulation With Multisim and LabviewVenk ANo ratings yet
- Advanced Control of A Reverse Osmosis Desalination Unit. Assef. 1996. JprocontDocument7 pagesAdvanced Control of A Reverse Osmosis Desalination Unit. Assef. 1996. JprocontEdgar HuancaNo ratings yet
- Design of A Fuzzy Logic Proportional Integral Derivative Controller of Direct Current Motor Speed ControlDocument10 pagesDesign of A Fuzzy Logic Proportional Integral Derivative Controller of Direct Current Motor Speed ControlIAES International Journal of Robotics and AutomationNo ratings yet
- Unicont PMGDocument2 pagesUnicont PMGitsirc67No ratings yet
- ATSDocument16 pagesATSBojan Kos100% (1)
- 201412914488399Document25 pages201412914488399Phạm Hoàng SơnNo ratings yet
- UoN SyllabusDocument40 pagesUoN SyllabusSam AngNo ratings yet
- PXC Compact Datasheet 2017Document13 pagesPXC Compact Datasheet 2017Adita Rian PradanaNo ratings yet
- CKVJ 1300 PDFDocument19 pagesCKVJ 1300 PDFsmsbondNo ratings yet
- Design of Discrete-Time PID Controller: Ibrahim A - El-Sharif Fathi O. HarebDocument6 pagesDesign of Discrete-Time PID Controller: Ibrahim A - El-Sharif Fathi O. HarebCARPE NOCTEMNo ratings yet
- DDMR Trajectory Tracking With Using Pid and Kinematic Based Backstepping ControllerDocument15 pagesDDMR Trajectory Tracking With Using Pid and Kinematic Based Backstepping ControllerAbdrahmane BenaouadNo ratings yet