You might also like
- Time Series SolutionDocument5 pagesTime Series Solutionbehrooz100% (1)
- Partial Differential EquationDocument9 pagesPartial Differential EquationEng Shakir H100% (1)
- Procedure For Field Joint CoatingDocument10 pagesProcedure For Field Joint CoatingM Waqas HabibNo ratings yet
- C32 Electronic Unit Injector - Adjust PDFDocument4 pagesC32 Electronic Unit Injector - Adjust PDFmanu luvunga100% (2)
- Atan2 - WikipediaDocument9 pagesAtan2 - Wikipediatravail compteNo ratings yet
- Probability 2019Document11 pagesProbability 2019Swarna ChadalavadaNo ratings yet
- Monotonicity Properties of The Gamma FunctionDocument4 pagesMonotonicity Properties of The Gamma Functionom younesNo ratings yet
- Math 677. Fall 2009. Homework #1 SolutionsDocument3 pagesMath 677. Fall 2009. Homework #1 SolutionsRodrigo KostaNo ratings yet
- Exfall2021 With SolutionsDocument8 pagesExfall2021 With SolutionsJulius DesertusNo ratings yet
- Vibrations of StructuresDocument9 pagesVibrations of StructuresRafaAlmeidaNo ratings yet
- Idris3 PDFDocument15 pagesIdris3 PDFادريس عطيه النيانNo ratings yet
- 2250 Matrix ExponentialDocument7 pages2250 Matrix Exponentialkanet17No ratings yet
- Assignment 1Document2 pagesAssignment 1lallamayandNo ratings yet
- Cgnotes PDFDocument11 pagesCgnotes PDFBijaya PandeyNo ratings yet
- Gi Part1 PDFDocument57 pagesGi Part1 PDFasdfghjNo ratings yet
- Problem Set - 6: MATHEMATICS-II (MA10002)Document2 pagesProblem Set - 6: MATHEMATICS-II (MA10002)MaulinduNo ratings yet
- Inverse Trigonometric FunctionsDocument12 pagesInverse Trigonometric FunctionsHéctorValleNo ratings yet
- Final Exam Solutions: SolutionDocument10 pagesFinal Exam Solutions: SolutionHanna KristantoNo ratings yet
- 4604 Exam2 Solutions Fa05Document7 pages4604 Exam2 Solutions Fa05Muhammad Nomaan ❊No ratings yet
- Optimal Control (Course Code: 191561620)Document4 pagesOptimal Control (Course Code: 191561620)Abdesselem BoulkrouneNo ratings yet
- Lec7matrixnorm Part4Document13 pagesLec7matrixnorm Part4Somnath DasNo ratings yet
- A Computational Method With MAPLE For A Piecewise Polynomial Approximation To The Trigonometric FunctionsDocument11 pagesA Computational Method With MAPLE For A Piecewise Polynomial Approximation To The Trigonometric FunctionsAurangZaib LaghariNo ratings yet
- System Identification and Data Analysis Lab Session # 8Document3 pagesSystem Identification and Data Analysis Lab Session # 8GeniusAtwork2021No ratings yet
- Answer 2016Document8 pagesAnswer 2016John ChanNo ratings yet
- 1 Functions of A Single VariableDocument17 pages1 Functions of A Single VariableMajak MarialNo ratings yet
- 1 Parametrized Curve: Jiwen HeDocument8 pages1 Parametrized Curve: Jiwen HeLollo123No ratings yet
- EE 351 Spring 2021 Homework 1 SolutionsDocument4 pagesEE 351 Spring 2021 Homework 1 SolutionsKalenNo ratings yet
- Griffith's Introduction To Quantum Mechanics Problem 3.30Document3 pagesGriffith's Introduction To Quantum Mechanics Problem 3.30palisonNo ratings yet
- High Performance ECDSA Over F Based On Java With Hardware AccelerationDocument14 pagesHigh Performance ECDSA Over F Based On Java With Hardware Accelerationsujak34No ratings yet
- Paper 4Document9 pagesPaper 4Parthi SaminathanNo ratings yet
- Cs421 Cheat SheetDocument2 pagesCs421 Cheat SheetJoe McGuckinNo ratings yet
- Maxima Minima 3DDocument5 pagesMaxima Minima 3Dzubinp2202No ratings yet
- Solutions To Exercises 8.1: Section 8.1 Partial Differential Equations in Physics and EngineeringDocument21 pagesSolutions To Exercises 8.1: Section 8.1 Partial Differential Equations in Physics and EngineeringTri Phương NguyễnNo ratings yet
- Department of Mathematics School of Advanced Sciences (Matlab)Document4 pagesDepartment of Mathematics School of Advanced Sciences (Matlab)KARTHIKEYA REDDY B SNo ratings yet
- Applications of CalculusDocument11 pagesApplications of CalculusSiddharth AcharyaNo ratings yet
- 2018.proceedings Cmmse 7Document4 pages2018.proceedings Cmmse 7JE Macias-DiazNo ratings yet
- College Algebra - Sample12Document25 pagesCollege Algebra - Sample12AbchoNo ratings yet
- AM2002 Lecture 3A PDFDocument6 pagesAM2002 Lecture 3A PDFDilruk GallageNo ratings yet
- Complex Traveling-Wave and Solutions To The Equations: Solitons Klein Gordon ZakharovDocument11 pagesComplex Traveling-Wave and Solutions To The Equations: Solitons Klein Gordon Zakharovsongs qaumiNo ratings yet
- PHYS 381 W23 Assignment 4Document8 pagesPHYS 381 W23 Assignment 4Nathan NgoNo ratings yet
- HMW1 PDFDocument11 pagesHMW1 PDFeduardolarangeiraNo ratings yet
- Bisection Closed Families: Abstract. For Two Even Subsets A, B (N), Let A Bisects B Denote That - A BDocument5 pagesBisection Closed Families: Abstract. For Two Even Subsets A, B (N), Let A Bisects B Denote That - A Btap1cseNo ratings yet
- Numerical Linear Algebra University of Edinburgh Past Paper 2019-2020Document5 pagesNumerical Linear Algebra University of Edinburgh Past Paper 2019-2020Jonathan SamuelsNo ratings yet
- Week6 Assignment SolutionsDocument14 pagesWeek6 Assignment Solutionsvicky.sajnaniNo ratings yet
- FunctionalAnalysisMathematica PDFDocument94 pagesFunctionalAnalysisMathematica PDFAlfredo MartínezNo ratings yet
- Math 1Document86 pagesMath 1Naji ZaidNo ratings yet
- 3fa2s 2012 AbrirDocument8 pages3fa2s 2012 AbrirOmaguNo ratings yet
- MA 542 - Differential Equations: End-Semester Examination Department of MathematicsDocument2 pagesMA 542 - Differential Equations: End-Semester Examination Department of MathematicsNaveen GuptaNo ratings yet
- Good McqsDocument4 pagesGood McqsJason DrakeNo ratings yet
- Lab 2 - Fourier SeriesDocument6 pagesLab 2 - Fourier SeriesEd ItrNo ratings yet
- Numerical Mathematics II For Engineers: Homework 01Document3 pagesNumerical Mathematics II For Engineers: Homework 01Benjamin BnNo ratings yet
- MIT18 S096F13 Pset4Document7 pagesMIT18 S096F13 Pset4TheoNo ratings yet
- Formula Sheet: PS+QR QsDocument4 pagesFormula Sheet: PS+QR QsTsehayMegersaNo ratings yet
- Advance Engineering Mathematics E-Note PDFDocument77 pagesAdvance Engineering Mathematics E-Note PDFridhamNo ratings yet
- InterpolationDocument7 pagesInterpolationNivi SenthilNo ratings yet
- Slide 1 Series SolutionDocument36 pagesSlide 1 Series SolutionmoinulsaqibNo ratings yet
- Paperia 2 2023-2Document7 pagesPaperia 2 2023-2ayanoaishi1980No ratings yet
- Nptel CN MathsDocument32 pagesNptel CN MathsAnurag SharmaNo ratings yet
- ASGDDocument18 pagesASGDRogério MainardesNo ratings yet
- Mathematical Functions: Polytechnic Institute of TabacoDocument6 pagesMathematical Functions: Polytechnic Institute of TabacoAlexander Carullo MoloNo ratings yet
- HW5Document2 pagesHW5karanbir123No ratings yet
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesFrom EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNo ratings yet
- 20W40 MSDSDocument2 pages20W40 MSDSAbhinav SrivastavaNo ratings yet
- US Hex Bolt SizesDocument2 pagesUS Hex Bolt SizesYana Jarang OlNo ratings yet
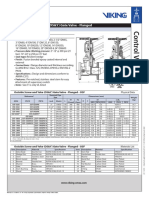
- Outside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesDocument2 pagesOutside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesMark Louie GuintoNo ratings yet
- Home,: A Solace To Which A Journey Is Never Too Long..Document25 pagesHome,: A Solace To Which A Journey Is Never Too Long..Duvonto RealtyNo ratings yet
- RIL AGM Presentation SlidesDocument44 pagesRIL AGM Presentation SlidesDeshGujaratNo ratings yet
- 048Document6 pages048kokykarkarNo ratings yet
- Up-F-020 Solicitud de Admisión de Practicantes Ver-08Document108 pagesUp-F-020 Solicitud de Admisión de Practicantes Ver-08MARCOS RODOLFO MALDONADO ZEVALLOSNo ratings yet
- Earned Schedule - Walt LipkeDocument27 pagesEarned Schedule - Walt LipkeKatie BensonNo ratings yet
- On The Gaussian Error Function (1935) : Robert J. KolkerDocument4 pagesOn The Gaussian Error Function (1935) : Robert J. KolkerSanthosh KulandaiyanNo ratings yet
- Functions of An EngineerDocument5 pagesFunctions of An EngineerDEUS PHILIP DURANNo ratings yet
- TK-C Transmitter PDFDocument4 pagesTK-C Transmitter PDFGopal HegdeNo ratings yet
- Persuasive Speech Outline Spring 2016Document2 pagesPersuasive Speech Outline Spring 2016api-311467409No ratings yet
- VORON2.2 ManualDocument120 pagesVORON2.2 ManualSsZzliMmNo ratings yet
- CT Terminology LexiconDocument12 pagesCT Terminology LexiconjtbushbergNo ratings yet
- Starboard Strategies Issue 13-MinDocument28 pagesStarboard Strategies Issue 13-MinkrishnamrutamNo ratings yet
- Water Technology 2015 2016 1Document86 pagesWater Technology 2015 2016 1Srinivas AkHilNo ratings yet
- Drawing & Document List Cisanggiri 2 X 1.5 MWDocument4 pagesDrawing & Document List Cisanggiri 2 X 1.5 MWZoebairNo ratings yet
- Sensores AvDocument12 pagesSensores Avhb CorpNo ratings yet
- Section 1: Identification: TurpentineDocument10 pagesSection 1: Identification: TurpentineRobertNo ratings yet
- Introduccion To PhysicsDocument475 pagesIntroduccion To PhysicsLyvsNo ratings yet
- Imp For As400Document21 pagesImp For As400Dinesh ChaudhariNo ratings yet
- Nitrogen Purge Manifold For C2H2Document3 pagesNitrogen Purge Manifold For C2H2Abdullah FazilNo ratings yet
- Kalzip - Vapour Layer FR 0822 PDFDocument2 pagesKalzip - Vapour Layer FR 0822 PDFBerat CakmakliNo ratings yet
- TSA Surface Preparation and ApplicationDocument7 pagesTSA Surface Preparation and ApplicationMythri Metallizing Pvt Ltd Projects100% (1)
- db2v9 EsqlDocument419 pagesdb2v9 EsqlRaphael PugliesiNo ratings yet
- TDS Tixatrol STDocument2 pagesTDS Tixatrol STJose E BatistaNo ratings yet
- Pakistani Radio MarketDocument72 pagesPakistani Radio MarketNajeeb Anwar100% (1)
- Lectures - Mass TransferDocument36 pagesLectures - Mass TransferaaaNo ratings yet