You might also like
- STM32 Nucleo Boards User Manual - ST PDFDocument54 pagesSTM32 Nucleo Boards User Manual - ST PDFSebastian PeñaNo ratings yet
- Capture/Compare/Pwm (CCP) Modules in PIC 16F877Document8 pagesCapture/Compare/Pwm (CCP) Modules in PIC 16F877Prabhu Parames100% (1)
- Microcontroller At89c52Document3 pagesMicrocontroller At89c52chaumathurNo ratings yet
- AN-1525 Single Supply Operation of The DAC0800 and DAC0802: Application ReportDocument6 pagesAN-1525 Single Supply Operation of The DAC0800 and DAC0802: Application ReportYasin ArslanNo ratings yet
- ARM OverviewDocument16 pagesARM OverviewNaagaraaju AaraadhyulaNo ratings yet
- Low Power Nine-Bit Sigma-Delta ADC Design Using TSMC 0.18micron TechnologyDocument5 pagesLow Power Nine-Bit Sigma-Delta ADC Design Using TSMC 0.18micron Technologyeditor_ijtel100% (1)
- Dac 0800 & Dac 0802 (An 1525)Document4 pagesDac 0800 & Dac 0802 (An 1525)HARICH90No ratings yet
- Ur 10Document58 pagesUr 10Mikko ItäluomaNo ratings yet
- Altivar 18Document35 pagesAltivar 18veroljubdjNo ratings yet
- PDFDocument2 pagesPDFFlorian LeordeanuNo ratings yet
- Sk40c Pic 16f877a Crash CourseDocument24 pagesSk40c Pic 16f877a Crash Coursezulko100% (3)
- Stm32f401re User ManualDocument54 pagesStm32f401re User Manualdanz1994No ratings yet
- FBs Manual PDFDocument416 pagesFBs Manual PDFfressNo ratings yet
- Ressorces KH MTS-86CDocument1 pageRessorces KH MTS-86CRafik OucheneNo ratings yet
- Redressement Contrôlé Monophasé Simple Alternance: Exercice 1Document4 pagesRedressement Contrôlé Monophasé Simple Alternance: Exercice 1Ay OùbNo ratings yet
- Fiche SPIDERVIEW 4 MultilinguaDocument8 pagesFiche SPIDERVIEW 4 Multilinguaکوروش بزرگNo ratings yet
- Mikropascal ManualDocument349 pagesMikropascal ManualEnrique De Haro CortesNo ratings yet
- Chap9 8051 Timer ProgrammingDocument42 pagesChap9 8051 Timer Programmingdon_tknowNo ratings yet
- MOSFET Selector Guide Definitions: Status DescriptionDocument84 pagesMOSFET Selector Guide Definitions: Status DescriptionBanyugeaNo ratings yet
- DS1104 by Monnzongo Daniel ENSETDocument4 pagesDS1104 by Monnzongo Daniel ENSETGistain NgomeNo ratings yet
- Chapter 2 - 8051 Microcontroller ArchitectureDocument27 pagesChapter 2 - 8051 Microcontroller ArchitectureAgxin M J Xavier100% (1)
- Instrumentation AmplifierDocument2 pagesInstrumentation AmplifierMarcus MillsNo ratings yet
- CNC by SourabhDocument7 pagesCNC by SourabhsaurabhNo ratings yet
- nx-877 Pic16f887 Experiment Board PDFDocument8 pagesnx-877 Pic16f887 Experiment Board PDFfren9123No ratings yet
- Input Output Ports of 8051Document5 pagesInput Output Ports of 8051mukeshmbNo ratings yet
- 6416 DSK Quickstartguide PDFDocument4 pages6416 DSK Quickstartguide PDFpriyanirumaNo ratings yet
- L293D Motor Control Shield: FeaturesDocument6 pagesL293D Motor Control Shield: FeaturesJefferson HenriqueNo ratings yet
- Instruction Set ArchitectureDocument8 pagesInstruction Set ArchitecturekalpanasripathiNo ratings yet
- 8085 SimulatorDocument2 pages8085 Simulatorradke42626No ratings yet
- Atmel ATmega328 Test Circuit DiagramDocument6 pagesAtmel ATmega328 Test Circuit DiagramGhigoarta Sergiu DanielNo ratings yet
- SMPS - Topologies PDFDocument2 pagesSMPS - Topologies PDFLungu CristianNo ratings yet
- HO 02 - Link Budget ExercisesDocument4 pagesHO 02 - Link Budget ExercisesWitto PereNo ratings yet
- MicroprocessorDocument1 pageMicroprocessorPrableen SinghNo ratings yet
- Digital Blood Pressure MeterDocument8 pagesDigital Blood Pressure MeterZulamov BobanNo ratings yet
- PSIM User ManualDocument259 pagesPSIM User ManualCourtney JenningsNo ratings yet
- Interfacing Programs For 8085Document37 pagesInterfacing Programs For 8085archankumarturagaNo ratings yet
- DejanDocument76 pagesDejanDragana Milosevic StamenkovicNo ratings yet
- Electronic Timers For Lights ControllingDocument4 pagesElectronic Timers For Lights ControllingTri NathNo ratings yet
- DC Servo Trainer: - Electrical MachineDocument3 pagesDC Servo Trainer: - Electrical MachineMuaath100% (1)
- R-782 PR-4100 Reader Product Sheet DG12-0115Document2 pagesR-782 PR-4100 Reader Product Sheet DG12-0115AkhilkpradeepNo ratings yet
- Ficha Tecnica UPS NETPRODocument29 pagesFicha Tecnica UPS NETPROGeovanny PiguaveNo ratings yet
- Line Follower Robot Using 8051 Micro ControllerDocument34 pagesLine Follower Robot Using 8051 Micro Controllerm.abdullah100% (2)
- LCD12864-COG LCD Module User ManualDocument14 pagesLCD12864-COG LCD Module User ManualSriyanjanNo ratings yet
- Easy DownloaderDocument6 pagesEasy DownloaderErwin Cahyadi100% (1)
- Timer Counter in ARM7 (LPC2148) : Aarav SoniDocument26 pagesTimer Counter in ARM7 (LPC2148) : Aarav SoniMatthew BattleNo ratings yet
- ON - Semiconductor KA78R05CTU Datasheet PDFDocument18 pagesON - Semiconductor KA78R05CTU Datasheet PDFKhaled KamelNo ratings yet
- Electronic Components-EDM PDFDocument526 pagesElectronic Components-EDM PDFEduardo J. KwiecienNo ratings yet
- A 2917Document8 pagesA 2917El Cuervo100% (1)
- Electronic Project 3Document50 pagesElectronic Project 3AdilNo ratings yet
- Programming PIC16F877ADocument2 pagesProgramming PIC16F877ADevi ChaitanyaNo ratings yet
- 005 (Model-Based Fault Detection and Diagnosis)Document12 pages005 (Model-Based Fault Detection and Diagnosis)Sead KurtovićNo ratings yet
- Temperature Sensing/Monitoring Using Lm35 & Atmega8Document6 pagesTemperature Sensing/Monitoring Using Lm35 & Atmega8Suket75% (4)
- MSP432 Chapter2 v1Document59 pagesMSP432 Chapter2 v1Akshat TulsaniNo ratings yet
- Applications of DSPDocument6 pagesApplications of DSPjpsridharNo ratings yet
- 8051 ArchitectureDocument37 pages8051 ArchitectureALNo ratings yet
- MPMC - UNIT - 2 - All SlidesDocument117 pagesMPMC - UNIT - 2 - All Slidesneeraj ChowdaryNo ratings yet
- 8051Document32 pages8051Fraud PriyanNo ratings yet
- Unit 1 MaDocument29 pagesUnit 1 MaEljameely JamaleldeenNo ratings yet
- PIC16F87XA: 3.7 Protection Against Spurious Write 3.8 Operation During Code-ProtectDocument5 pagesPIC16F87XA: 3.7 Protection Against Spurious Write 3.8 Operation During Code-Protectvitor valeNo ratings yet
- Presentation in Microcontrolle R: Department OF Electronics &communicationDocument20 pagesPresentation in Microcontrolle R: Department OF Electronics &communicationManohar KumarNo ratings yet
- LOV Vendor QuestionnaireDocument3 pagesLOV Vendor QuestionnaireJonathan BedoyaNo ratings yet
- Os-Module 1-Notes-1Document49 pagesOs-Module 1-Notes-1Sai SumanNo ratings yet
- Communication Between 8086 and 8087Document11 pagesCommunication Between 8086 and 8087i studyNo ratings yet
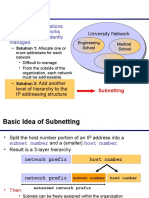
- Lect 2-Intro To SubnettingDocument11 pagesLect 2-Intro To Subnettingapi-358658237No ratings yet
- Bcom Usb User Guide 1.3Document39 pagesBcom Usb User Guide 1.3Armando Jácome CabascangoNo ratings yet
- Pros and Cons of Virtualization in Cloud ComputingDocument6 pagesPros and Cons of Virtualization in Cloud ComputingSaagar ShetageNo ratings yet
- E S R M F: Adsl Usb ModemDocument12 pagesE S R M F: Adsl Usb ModemSaif Eddine AliaNo ratings yet
- 2KA3 Chapter5Document62 pages2KA3 Chapter5RyanNo ratings yet
- Security NatDocument282 pagesSecurity NatShpresa SadikuNo ratings yet
- Communication by PLC PDFDocument2 pagesCommunication by PLC PDFJoshuaNo ratings yet
- C++ Pthread TutorialDocument26 pagesC++ Pthread TutorialUmar MajeedNo ratings yet
- K9CHGY8S5M CCK0 PinoutDocument2 pagesK9CHGY8S5M CCK0 PinoutasfsfsafsafasNo ratings yet
- Robust Header Compression - ROHCDocument5 pagesRobust Header Compression - ROHCEast PrepostNo ratings yet
- Secon 121Document2 pagesSecon 121Qasim KhanNo ratings yet
- GTD Free ManualsDocument2 pagesGTD Free Manualssempreaprender37010% (1)
- Linux For You-Nov-2009Document116 pagesLinux For You-Nov-2009Santhosh MahankaliNo ratings yet
- UART LibraryDocument9 pagesUART LibraryRey Del Castillo Luar Jr.100% (3)
- Archer T9UH (EU&US) - 2.0 - Datasheet PDFDocument4 pagesArcher T9UH (EU&US) - 2.0 - Datasheet PDFSebastian ChaileNo ratings yet
- EE325: Microprocessors and Microcontrollers: Inter Integrated Circuit Bus: I C BusDocument21 pagesEE325: Microprocessors and Microcontrollers: Inter Integrated Circuit Bus: I C BusLedeheNo ratings yet
- VSAM - Basic Concepts - V2.0Document133 pagesVSAM - Basic Concepts - V2.0pavanrajhrNo ratings yet
- Mysql Architecture GuideDocument17 pagesMysql Architecture GuideKramer KramerNo ratings yet
- Any Cast Load BalancingDocument4 pagesAny Cast Load Balancingrichshaw21No ratings yet
- Malware AnalysisDocument3 pagesMalware AnalysisViren ChoudhariNo ratings yet
- BUSH Repair TipsDocument30 pagesBUSH Repair TipsBellágh FerencNo ratings yet
- EC574Document1 pageEC574utkarsh rajwanshNo ratings yet
- Tabela Comparativa Microsoft e Office 365Document1 pageTabela Comparativa Microsoft e Office 365Cláudio Luiz AlmeidaNo ratings yet
- Document 2188300.1 - Reset PDUDocument4 pagesDocument 2188300.1 - Reset PDUFelipe BragaNo ratings yet
- Manual de MK809IIIDocument14 pagesManual de MK809IIIDanny Anton Asanza0% (1)
- 7 Steps To Upgrade IOS Image On Cisco Catalyst Switch or RouterDocument7 pages7 Steps To Upgrade IOS Image On Cisco Catalyst Switch or RouterasimalampNo ratings yet
- Filetype PDF Computer System ArchitectureDocument2 pagesFiletype PDF Computer System ArchitectureTanyaNo ratings yet